ROS--机器人小车仿真rviz

URDF练习
需求描述:
创建一个四轮圆柱状机器人模型,机器人参数如下,底盘为圆柱状,半径 10cm,高 8cm,四轮由两个驱动轮和两个万向支撑轮组成,两个驱动轮半径为 3.25cm,轮胎宽度1.5cm,两个万向轮为球状,半径 0.75cm,底盘离地间距为 1.5cm(与万向轮直径一致)
实现流程:
创建机器人模型可以分步骤实现
新建 urdf 文件,并与 launch 文件集成搭建底盘在底盘上添加两个驱动轮在底盘上添加两个万向轮
查看工作文档目录
创建一个机器人模型:semo02_date.urdf.xacro
<!--使用 xacro 优化 URDF 版的小车底盘实现:实现思路:1.将一些常量、变量封装为 xacro:property比如:PI 值、小车底盘半径、离地间距、车轮半径、宽度 ....2.使用 宏 封装驱动轮以及支撑轮实现,调用相关宏生成驱动轮与支撑轮-->
<!-- 根标签,必须声明 xmlns:xacro -->
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"><!-- 封装变量、常量 --><xacro:property name="PI" value="3.141"/><!-- 宏:黑色设置 --><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material><!-- 底盘属性 --><xacro:property name="base_footprint_radius" value="0.001" /> <!-- base_footprint 半径 --><xacro:property name="base_link_radius" value="0.1" /> <!-- base_link 半径 --><xacro:property name="base_link_length" value="0.08" /> <!-- base_link 长 --><xacro:property name="earth_space" value="0.015" /> <!-- 离地间距 --><!-- 底盘 --><link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}" /></geometry></visual></link><link name="base_link"><visual><geometry><cylinder radius="${base_link_radius}" length="${base_link_length}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="yellow"><color rgba="0.5 0.3 0.0 0.5" /></material></visual></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint" /><child link="base_link" /><origin xyz="0 0 ${earth_space + base_link_length / 2 }" /></joint><!-- 驱动轮 --><!-- 驱动轮属性 --><xacro:property name="wheel_radius" value="0.0325" /><!-- 半径 --><xacro:property name="wheel_length" value="0.015" /><!-- 宽度 --><!-- 驱动轮宏实现 --><xacro:macro name="add_wheels" params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" /><axis xyz="0 1 0" /></joint></xacro:macro><xacro:add_wheels name="left" flag="1" /><xacro:add_wheels name="right" flag="-1" /><!-- 支撑轮 --><!-- 支撑轮属性 --><xacro:property name="support_wheel_radius" value="0.0075" /> <!-- 支撑轮半径 --><!-- 支撑轮宏 --><xacro:macro name="add_support_wheel" params="name flag" ><link name="${name}_wheel"><visual><geometry><sphere radius="${support_wheel_radius}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" /><axis xyz="1 1 1" /></joint></xacro:macro><xacro:add_support_wheel name="front" flag="1" /><xacro:add_support_wheel name="back" flag="-1" /></robot>创建摄像头xacro 文件:semo03_date.urdf.xacro
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 摄像头属性 --><xacro:property name="camera_length" value="0.01" /> <!-- 摄像头长度(x) --><xacro:property name="camera_width" value="0.025" /> <!-- 摄像头宽度(y) --><xacro:property name="camera_height" value="0.025" /> <!-- 摄像头高度(z) --><xacro:property name="camera_x" value="0.08" /> <!-- 摄像头安装的x坐标 --><xacro:property name="camera_y" value="0.0" /> <!-- 摄像头安装的y坐标 --><xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 --><!-- 摄像头关节以及link --><link name="camera"><visual><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual></link><joint name="camera2base_link" type="fixed"><parent link="base_link" /><child link="camera" /><origin xyz="${camera_x} ${camera_y} ${camera_z}" /></joint>
</robot>创建雷达xacro 文件:semo_04_date.urdf.xacro
<!--小车底盘添加雷达
-->
<robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 雷达支架 --><xacro:property name="support_length" value="0.15" /> <!-- 支架长度 --><xacro:property name="support_radius" value="0.01" /> <!-- 支架半径 --><xacro:property name="support_x" value="0.0" /> <!-- 支架安装的x坐标 --><xacro:property name="support_y" value="0.0" /> <!-- 支架安装的y坐标 --><xacro:property name="support_z" value="${base_link_length / 2 + support_length / 2}" /> <!-- 支架安装的z坐标:底盘高度 / 2 + 支架高度 / 2 --><link name="support"><visual><geometry><cylinder radius="${support_radius}" length="${support_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="red"><color rgba="0.8 0.2 0.0 0.8" /></material></visual></link><joint name="support2base_link" type="fixed"><parent link="base_link" /><child link="support" /><origin xyz="${support_x} ${support_y} ${support_z}" /></joint><!-- 雷达属性 --><xacro:property name="laser_length" value="0.05" /> <!-- 雷达长度 --><xacro:property name="laser_radius" value="0.03" /> <!-- 雷达半径 --><xacro:property name="laser_x" value="0.0" /> <!-- 雷达安装的x坐标 --><xacro:property name="laser_y" value="0.0" /> <!-- 雷达安装的y坐标 --><xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" /> <!-- 雷达安装的z坐标:支架高度 / 2 + 雷达高度 / 2 --><!-- 雷达关节以及link --><link name="laser"><visual><geometry><cylinder radius="${laser_radius}" length="${laser_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual></link><joint name="laser2support" type="fixed"><parent link="support" /><child link="laser" /><origin xyz="${laser_x} ${laser_y} ${laser_z}" /></joint>
</robot>组合底盘摄像头与雷达的 xacro 文件:car.urdf.xacro
<!-- 组合小车底盘与摄像头与雷达 -->
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="semo02_date.urdf.xacro" /><xacro:include filename="semo03_date.urdf.xacro" /><xacro:include filename="semo_04_date.urdf.xacro" />
</robot>创建launch 文件:car_ee.launch
<launch><param name="robot_description" command="$(find xacro)/xacro $(find urdlee)/urdf/xacro/car.urdf.xacro" /><node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdlee)/config/showmycar.rviz" /><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" /><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" /><node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen"><rosparam file="$(find urdlee)/config/control.yaml" command="load" /><param name="sim" value="true" /></node></launch>上面使用的 /config/control.yaml
添加 arbotix 所需的配置文件:control.yaml
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手)....
# 因此,根 name 是 controller
controllers: {# 单控制器设置base_controller: {#类型: 差速控制器type: diff_controller,#参考坐标base_frame_id: base_footprint, #两个轮子之间的间距base_width: 0.2,#控制频率ticks_meter: 2000, #PID控制参数,使机器人车轮快速达到预期速度Kp: 12, Kd: 12, Ki: 0, Ko: 50, #加速限制accel_limit: 1.0 }
}上面使用的:showmycar.rviz"
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdlee)/config/showmycar.rviz" />
中的showmycar.rviz代码
Panels:- Class: rviz/DisplaysHelp Height: 78Name: DisplaysProperty Tree Widget:Expanded:- /Global Options1- /Status1- /RobotModel1- /RobotModel1/Status1Splitter Ratio: 0.5Tree Height: 719- Class: rviz/SelectionName: Selection- Class: rviz/Tool PropertiesExpanded:- /2D Pose Estimate1- /2D Nav Goal1- /Publish Point1Name: Tool PropertiesSplitter Ratio: 0.5886790156364441- Class: rviz/Views<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdlee)/config/showmycar.rviz" />Expanded:- /Current View1Name: ViewsSplitter Ratio: 0.5- Class: rviz/TimeName: TimeSyncMode: 0SyncSource: ""
Preferences:PromptSaveOnExit: true
Toolbars:toolButtonStyle: 2
Visualization Manager:Class: ""Displays:- Alpha: 0.5Cell Size: 1Class: rviz/GridColor: 160; 160; 164Enabled: trueLine Style:Line Width: 0.029999999329447746Value: LinesName: GridNormal Cell Count: 0Offset:X: 0Y: 0Z: 0Plane: XYPlane Cell Count: 10Reference Frame: <Fixed Frame>Value: true- Alpha: 1Class: rviz/RobotModelCollision Enabled: falseEnabled: trueLinks:All Links Enabled: trueExpand Joint Details: falseExpand Link Details: falseExpand Tree: falseLink Tree Style: Links in Alphabetic Orderbase_link:Alpha: 1Show Axes: falseShow Trail: falseValue: trueName: RobotModelRobot Description: robot_descriptionTF Prefix: ""Update Interval: 0Value: trueVisual Enabled: trueEnabled: trueGlobal Options:Background Color: 48; 48; 48Default Light: trueFixed Frame: base_linkFrame Rate: 30Name: rootTools:- Class: rviz/InteractHide Inactive Objects: true- Class: rviz/MoveCamera- Class: rviz/Select- Class: rviz/FocusCamera- Class: rviz/Measure- Class: rviz/SetInitialPoseTheta std deviation: 0.2617993950843811Topic: /initialposeX std deviation: 0.5Y std deviation: 0.5- Class: rviz/SetGoalTopic: /move_base_simple/goal- Class: rviz/PublishPointSingle click: trueTopic: /clicked_pointValue: trueViews:Current:Class: rviz/OrbitDistance: 10Enable Stereo Rendering:Stereo Eye Separation: 0.05999999865889549Stereo Focal Distance: 1Swap Stereo Eyes: falseValue: falseField of View: 0.7853981852531433Focal Point:X: 0Y: 0Z: 0Focal Shape Fixed Size: trueFocal Shape Size: 0.05000000074505806Invert Z Axis: falseName: Current ViewNear Clip Distance: 0.009999999776482582Pitch: 0.5103980302810669Target Frame: <Fixed Frame>Yaw: 5.4685821533203125Saved: ~
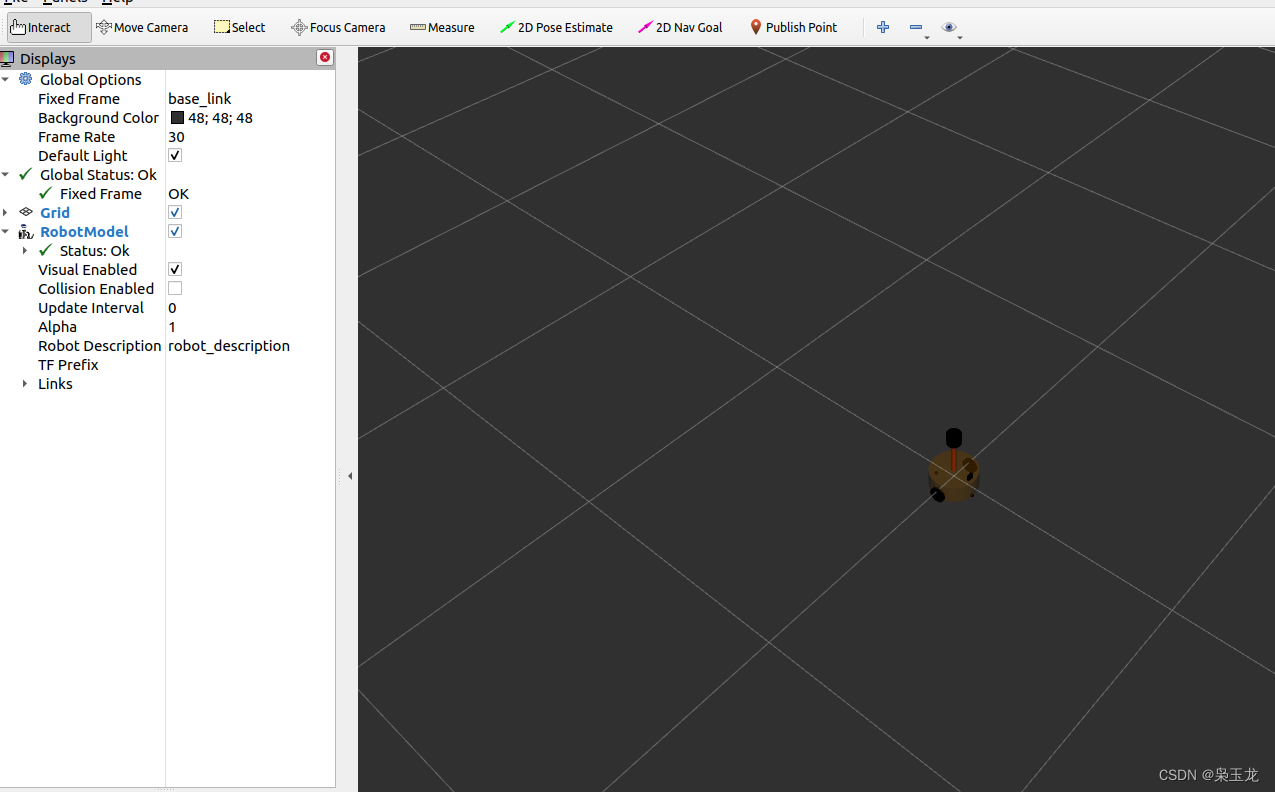
Window Geometry:Displays:collapsed: falseHeight: 1016Hide Left Dock: falseHide Right Dock: falseQMainWindow State: 000000ff00000000fd0000000400000000000001560000035afc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003d0000035a000000c900fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f0000035afc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003d0000035a000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007380000003efc0100000002fb0000000800540069006d0065010000000000000738000003bc00fffffffb0000000800540069006d00650100000000000004500000000000000000000004c70000035a00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000Selection:collapsed: falseTime:collapsed: falseTool Properties:collapsed: falseViews:collapsed: falseWidth: 1848X: 72Y: 27使用命令运行
source ./devel/setup.bash
roslaunch urdlee car_ee.launch
查看节点命令:rostopic list
/clicked_point
/cmd_vel
/diagnostics
/initialpose
/joint_states
/move_base_simple/goal
/odom
/rosout
/rosout_agg
/tf
/tf_static使用:odom运行小车
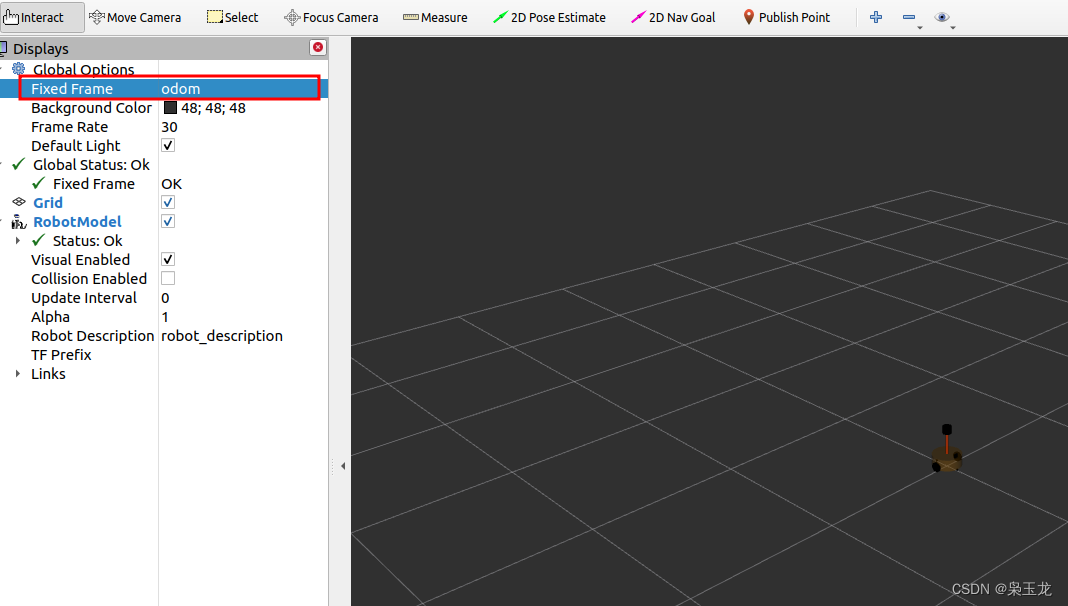
运行命令
代码自动运行
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'键盘手动运行
rosrun teleop_twist_keyboard teleop_twist_keyboard.py