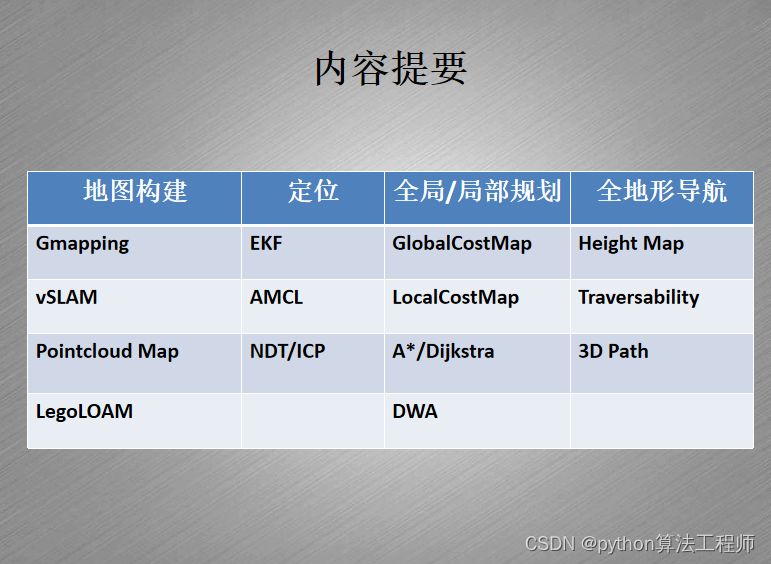
slam与导航开发

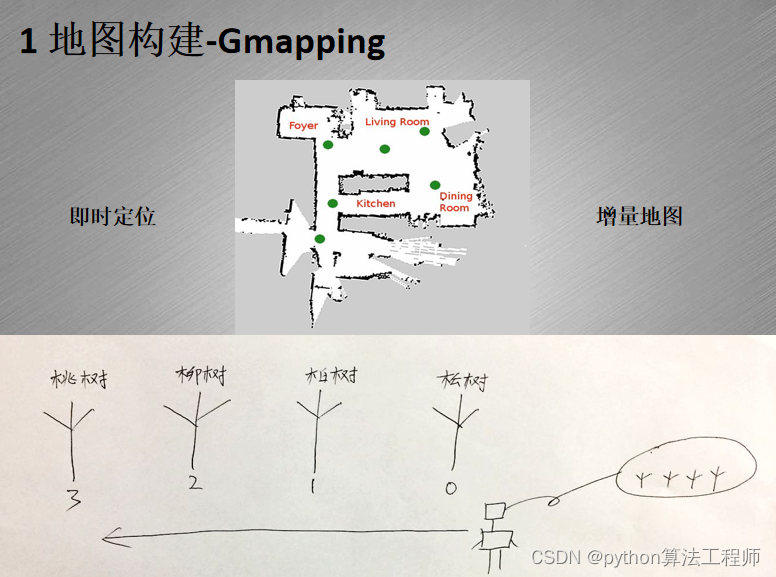
Gmapping是一种基于激光雷达数据的地图构建算法,可以用于建立机器人的环境地图。
Gmapping算法是基于粒子滤波器(Particle Filter)的SLAM算法,它通过将机器人在环境中的位姿和地图中的特征进行联合估计,实现了机器人在未知环境中的自主定位和地图构建。
Gmapping算法的基本流程如下:
- 机器人通过激光雷达获取环境中的障碍物和地标等信息;
- 利用激光雷达数据和机器人的运动信息,通过粒子滤波器对机器人在环境中的位姿进行估计;
- 利用机器人当前的位姿和激光雷达数据,更新地图中的障碍物和地标等信息;
- 不断重复上述过程,直到地图构建完成
Gmapping算法的优点是能够实时地构建环境地图,并且可以自适应地调整地图的分辨率和精度,以适应不同的环境和任务需求。缺点是在环境中存在大量动态障碍物时,容易出现定位漂移和地图误差等问题。
Gmapping算法在机器人导航、环境监测、智能交通等地方中得到了广泛应用,是一种实用性较强的地图构建算法。
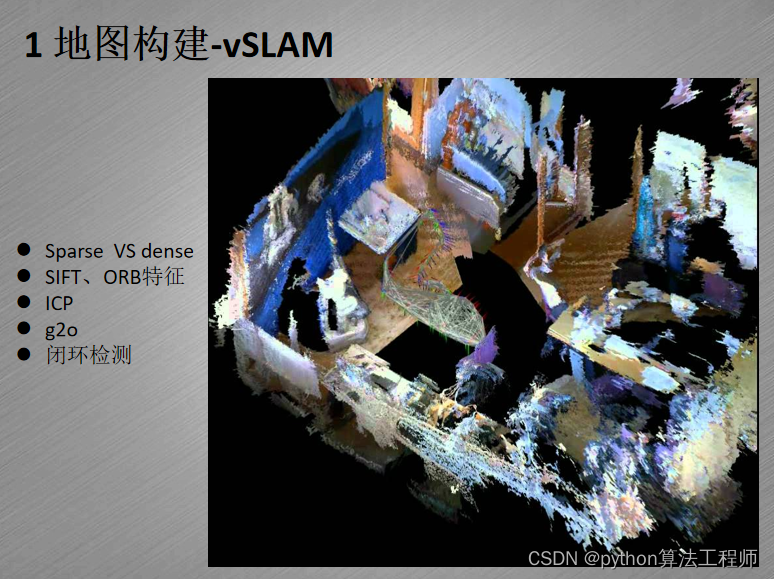
VSLAM是视觉同时定位与地图构建(Visual Simultaneous Localization and Mapping)的缩写,是一种基于视觉传感器(如摄像头)的SLAM(Simultaneous Localization and Mapping,即同时定位和地图构建)技术。
VSLAM技术通过利用摄像头获取环境中的图像信息,通过图像处理、特征提取和匹配等技术,实现机器人在未知环境中的自主定位和地图构建。相比于基于激光雷达的SLAM技术,VSLAM技术的优点包括设备成本低、环境适应性强、精度高等。
VSLAM技术的基本流程如下:
- 机器人通过摄像头获取环境中的图像信息;
- 利用图像处理、特征提取和匹配等技术,提取出图像中的特征点,并与地图中的特征点进行匹配;
- 通过特征点的匹配,估计机器人当前的位姿;
- 利用机器人当前的位姿和图像信息,更新地图中的障碍物和地标等信息; 不断重复上述过程,直到地图构建完成。
VSLAM技术目前已经在机器人导航、自动驾驶、无人机等地方中得到广泛应用,是一种具有广阔应用前景的技术。但是,VSLAM技术也存在一些挑战,如光照变化、动态物体、遮挡等问题,需要进一步研究和改进。
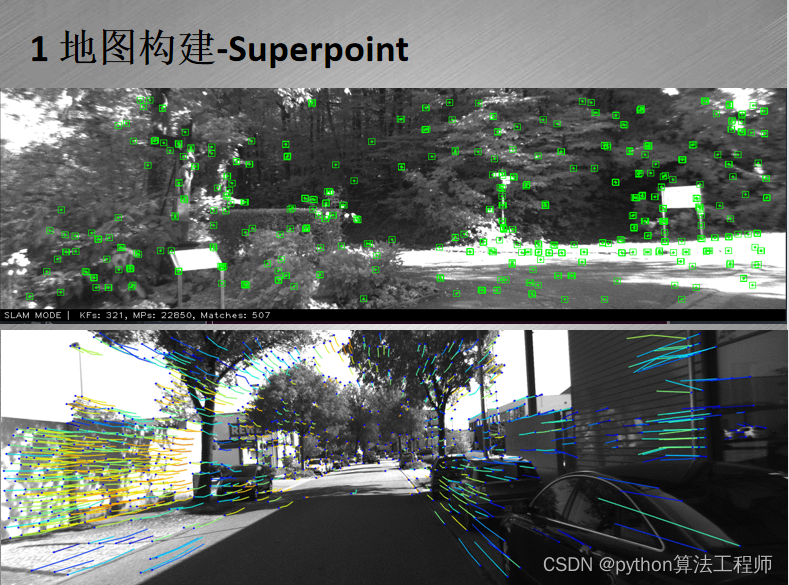
SuperPoint是一种基于深度学习的图像特征点检测和描述算法,由Deepak Mishra和Erik Learned-Miller等人于2018年提出。
SuperPoint算法基于卷积神经网络(CNN),通过训练神经网络来实现图像中特征点的检测和描述。相比于传统的特征点检测算法,如SIFT和SURF等,SuperPoint算法具有更好的速度和性能。
SuperPoint算法的基本流程如下:
- 通过卷积神经网络对输入图像进行预处理,提取图像的特征图;
- 在特征图中检测关键点,通过非极大值抑制(NMS)算法来筛选出最优的关键点;
- 对每个关键点,通过卷积神经网络来生成一个128维的描述子;
- 利用描述子来计算关键点之间的匹配关系,通过RANSAC等算法进行优化。
SuperPoint算法的优点是具有较高的检测和描述速度,同时能够在不同场景下实现高精度的特征点检测和描述。它在SLAM(Simultaneous Localization and Mapping),3D重建和物体识别等地方中得到了广泛应用。
SuperPoint算法由Deepak Mishra和Erik Learned-Miller等人于2018年提出,是一种基于深度学习的图像特征点检测和描述算法。SuperPoint算法的主要特点是通过卷积神经网络(CNN)实现特征点的检测和描述,具有更好的速度和性能。
在SuperPoint算法中,特征点的检测和描述是同时进行的。通过卷积神经网络对输入图像进行预处理,提取图像的特征图。在特征图中,通过对每个像素点进行卷积运算,得到该像素点的特征向量。这些特征向量被称为SuperPoint特征点。
在特征点检测过程中,SuperPoint算法使用了非极大值抑制(NMS)算法来筛选出最优的关键点。在特征点描述过程中,每个关键点被表示为一个128维的向量。这些特征向量被用来计算关键点之间的匹配关系,从而实现图像的配准和匹配。
SuperPoint算法的优点是具有较高的检测和描述速度,同时能够在不同场景下实现高精度的特征点检测和描述。它在SLAM、3D重建和物体识别等地方中得到了广泛应用。 SuperPoint算法的缺点是对于一些复杂的场景和光照条件,它的性能可能会受到一定的影响。
总的来说,SuperPoint算法是一种非常有前途的图像特征点检测和描述算法,对于许多视觉任务具有重要的应用价值。
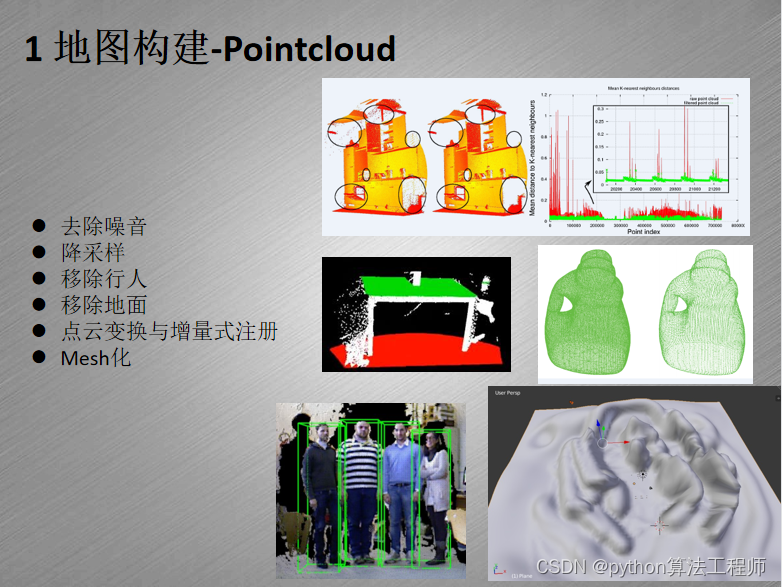
Pointcloud是一种基于点云数据的地图构建技术,可以用于建立机器人的环境地图。
Pointcloud技术是基于激光雷达等传感器获取的点云数据,通过点云数据的处理、分割、滤波等技术,实现机器人在未知环境中的自主定位和地图构建。
Pointcloud技术的基本流程如下:
- 机器人通过激光雷达等传感器获取环境中的点云数据;
- 对点云数据进行处理,包括点云分割、降噪、滤波等操作,去除噪声和无用信息;
- 利用机器人当前的位姿和点云数据,将点云数据转换为地图中的障碍物和地标等信息;
- 不断重复上述过程,直到地图构建完成。
Pointcloud技术的优点是能够实时地构建环境地图,并且可以自适应地调整地图的分辨率和精度,以适应不同的环境和任务需求。此外,Pointcloud技术也可以与SLAM等技术相结合,实现更为精确的定位和地图构建。
Pointcloud技术目前已经在机器人导航、自动驾驶、无人机等地方中得到广泛应用,是一种具有广泛应用前景的技术。但是,Pointcloud技术也存在一些挑战,如点云数据的处理、分割和匹配等问题,需要进一步研究和改进。
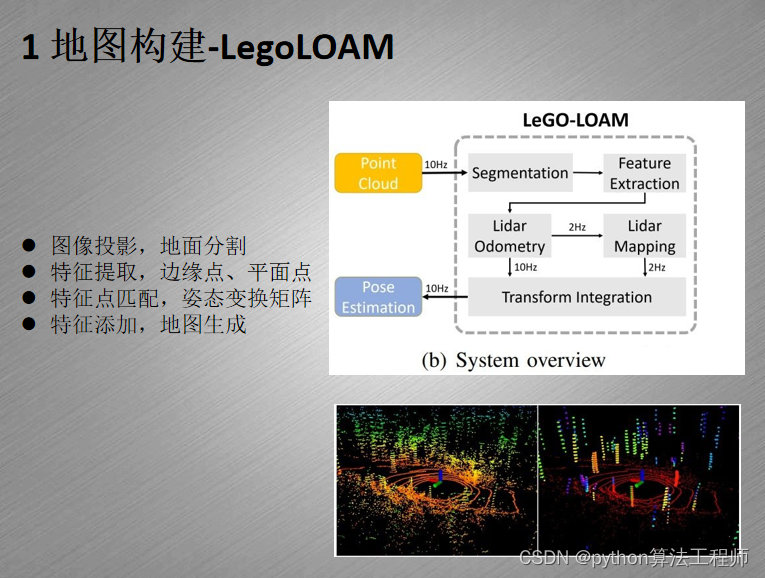 LegoLoam是一种基于激光雷达的地图构建技术,由J. Zhang等人于2018年提出,是Loam(Lidar Odometry and Mapping)算法的改进版本。
LegoLoam是一种基于激光雷达的地图构建技术,由J. Zhang等人于2018年提出,是Loam(Lidar Odometry and Mapping)算法的改进版本。
LegoLoam技术利用激光雷达获取环境中的点云数据,通过点云数据的处理和分析,实现机器人在未知环境中的自主定位和地图构建。
LegoLoam技术的基本流程如下:
- 机器人通过激光雷达获取环境中的点云数据;
- 利用激光雷达的旋转和运动信息,对点云数据进行运动补偿;
- 对补偿后的点云数据进行特征提取和匹配,得到机器人当前的位姿;
- 利用位姿信息和点云数据,更新地图中的障碍物和地标等信息;
- 不断重复上述过程,直到地图构建完成。
LegoLoam技术的优点是具有较高的定位和地图构建精度,同时能够在实时性和鲁棒性方面得到较好的保证。此外,LegoLoam技术还能够实现多传感器信息的融合,提高地图构建的精度和鲁棒性。
LegoLoam技术目前已经在机器人导航、自动驾驶、无人机等地方中得到广泛应用,是一种具有广泛应用前景的技术。但是,LegoLoam技术也存在一些挑战,如对点云数据的处理和分析等问题,需要进一步研究和改进。
 EKF(Extended Kalman Filter,扩展卡尔曼滤波器)是一种常用的状态估计算法,可以用于机器人定位等地方。
EKF(Extended Kalman Filter,扩展卡尔曼滤波器)是一种常用的状态估计算法,可以用于机器人定位等地方。
EKF算法是基于卡尔曼滤波器(Kalman Filter)算法的改进版本,通过对卡尔曼滤波器算法进行扩展,实现对非线性系统的状态估计。
在机器人定位中,EKF算法可以通过融合不同传感器(如激光雷达、IMU、GPS等)的信息,实现机器人在未知环境中的自主定位。EKF算法的基本流程如下:
- 定义状态模型和观测模型,包括状态变量、观测变量和状态转移方程;
- 利用卡尔曼滤波器算法进行状态估计,包括预测和更新两个阶段;
- 在预测阶段,通过状态转移方程预测机器人的下一时刻状态;
- 在更新阶段,利用传感器的观测数据对机器人当前的状态进行修正;
- 不断重复上述过程,实现机器人在未知环境中的自主定位。
EKF算法的优点是能够实现对非线性系统的状态估计,并且可以通过融合不同传感器的信息,提高定位精度和鲁棒性。此外,EKF算法还可以对传感器误差进行建模和校正,提高定位的准确性和可靠性。
EKF算法目前已经在机器人导航、自动驾驶、无人机等地方中得到广泛应用,是一种具有广泛应用前景的算法。但是,EKF算法也存在一些挑战,如对传感器误差的建模和校正等问题,需要进一步研究和改进。
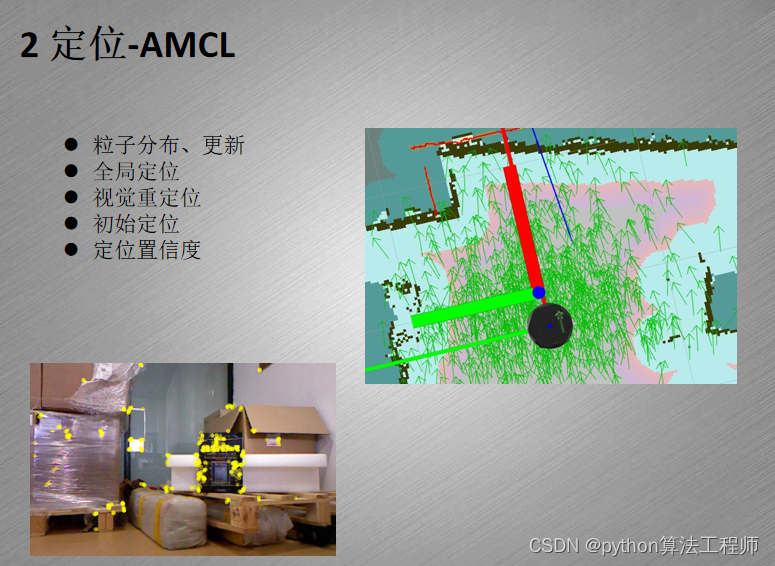
AMCL(Adaptive Monte Carlo Localization,自适应蒙特卡罗定位)是一种常用的概率定位算法,可以用于机器人在未知环境中的自主定位。
AMCL算法是基于蒙特卡罗定位算法(Monte Carlo Localization,MCL)的改进版本,通过对MCL算法进行改进,提高定位的精度和鲁棒性。
在机器人定位中,AMCL算法可以通过融合激光雷达等传感器的信息,实现机器人在未知环境中的自主定位。AMCL算法的基本流程如下:
- 定义状态空间和观测空间,包括机器人的位置和姿态信息,以及传感器的观测数据;
- 利用蒙特卡罗方法进行状态估计,包括粒子滤波和重采样两个阶段;
- 在粒子滤波阶段,根据先前的状态估计和传感器的观测数据,计算每个粒子的权重;
- 在重采样阶段,根据粒子的权重,重新采样得到新的粒子集合;
- 不断重复上述过程,实现机器人在未知环境中的自主定位。
AMCL算法的优点是能够实现对非线性系统的状态估计,并且可以通过融合不同传感器的信息,提高定位精度和鲁棒性。此外,AMCL算法还可以根据定位精度自适应地调整粒子数量和分布,提高定位效率和准确性。
AMCL算法目前已经在机器人导航、自动驾驶、无人机等地方中得到广泛应用,是一种具有广泛应用前景的算法。但是,AMCL算法也存在一些挑战,如对传感器误差的建模和校正等问题,需要进一步研究和改进。
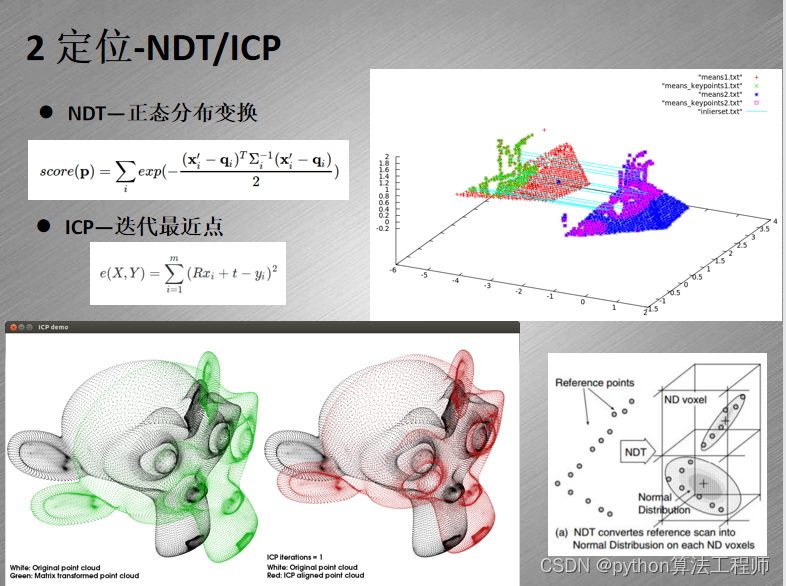
NDT(Normal Distributions Transform,正态分布变换)和ICP(Iterative Closest Point,迭代最近点)是两种常用的点云配准算法,可以用于机器人导航、3D重建等地方。
NDT算法是一种基于正态分布函数的点云配准算法,可以通过计算点云的正态分布函数,实现点云的匹配和配准。
ICP算法是一种基于最近点匹配的点云配准算法,可以通过不断迭代计算点云的最近点,实现点云的匹配和配准。
在机器人导航和3D重建中,NDT和ICP算法可以通过对不同位置的点云进行配准,实现机器人在未知环境中的自主导航和三维重建。NDT和ICP算法的基本流程如下:
- 获取不同位置的点云数据;
- 利用NDT或ICP算法进行点云配准;
- 在配准后,将点云数据合并,构建地图或三维模型;
- 不断重复上述过程,实现机器人在未知环境中的自主导航和三维重建。
NDT和ICP算法的优点是能够实现高精度的点云配准,并且可以在实时性要求不高的情况下,构建高精度的地图或三维模型。此外,NDT和ICP算法还可以在配准过程中考虑点云的法向量和曲率信息,提高配准的精度和鲁棒性。
NDT和ICP算法在机器人导航和3D重建等地方中得到了广泛应用,是一种具有广泛应用前景的算法。但是,NDT和ICP算法也存在一些挑战,如对点云噪声、遮挡和运动畸变等问题的处理,需要进一步研究和改进。
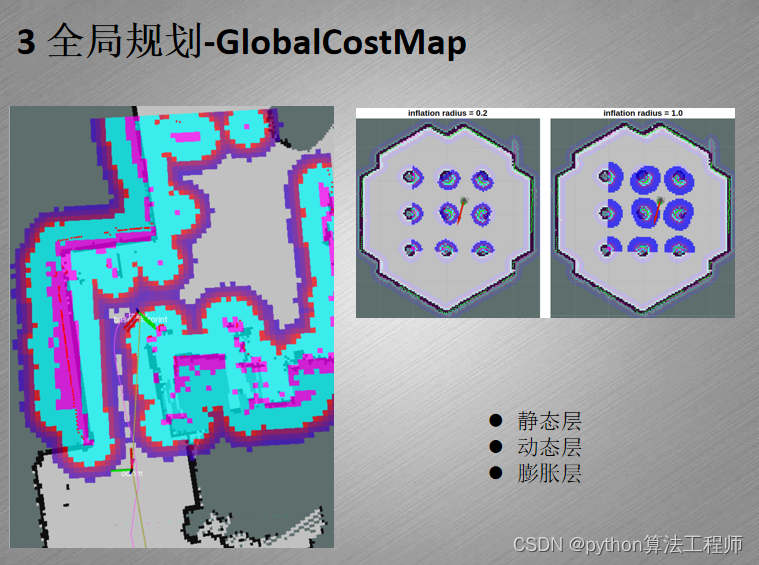
GlobalCostMap是一种常用的路径规划算法,可以用于机器人在未知环境中的自主导航。
GlobalCostMap算法是基于栅格地图的路径规划算法,可以通过对栅格地图进行建模和分析,实现机器人在未知环境中的全局路径规划。
在机器人导航中,GlobalCostMap算法可以通过对不同位置的栅格地图进行分析和比较,实现机器人在未知环境中的路径规划。GlobalCostMap算法的基本流程如下:
- 获取不同位置的栅格地图数据;
- 利用GlobalCostMap算法对栅格地图进行分析,计算每个栅格的代价;
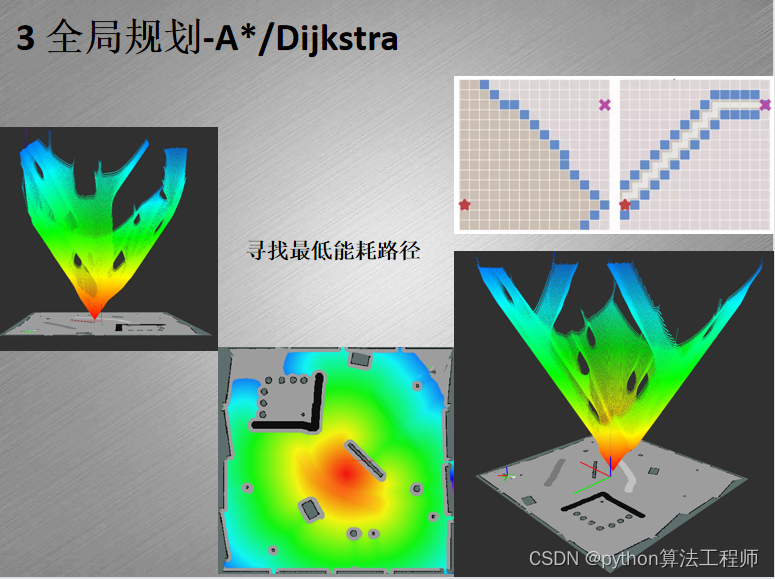
- 根据代价地图,使用路径规划算法(如A*算法)计算出机器人的全局路径;
- 控制机器人沿着全局路径运动;
- 不断重复上述过程,实现机器人在未知环境中的自主导航。
GlobalCostMap算法的优点是能够实现高效的全局路径规划,并且可以考虑地图中的障碍物、斜坡、坑洼等因素,提高路径规划的可靠性和安全性。此外,GlobalCostMap算法还可以结合机器人自身的传感器数据,实现实时的路径规划和避障。
GlobalCostMap算法在机器人导航中得到了广泛应用,是一种具有广泛应用前景的算法。但是,GlobalCostMap算法也存在一些挑战,如对地图精度、障碍物形状和机器人动态特性的考虑等问题,需要进一步研究和改进。

3 导航-move_base
move_base是ROS(机器人操作系统)中常用的导航功能包,可以用于机器人在未知环境中的自主导航。
move_base功能包提供了一种完整的导航系统,包括局部路径规划、全局路径规划、避障、控制等多个模块。在机器人导航中,move_base功能包可以通过对机器人的传感器数据和地图数据进行分析和比较,实现机器人在未知环境中的自主导航。
move_base功能包的基本流程如下:
- 获取机器人的传感器数据和地图数据;
- 利用全局路径规划算法(如A*算法)计算出机器人的全局路径;
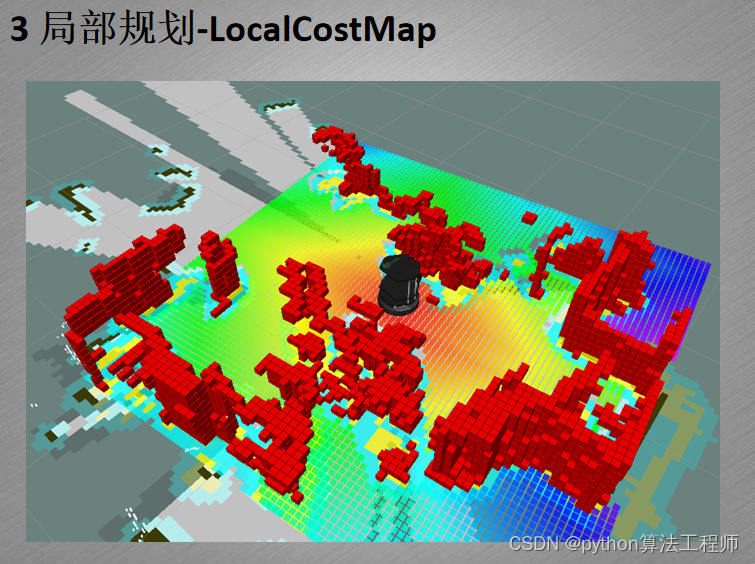
- 根据全局路径,使用局部路径规划算法(如DWA算法)计算出机器人的局部路径;
- 利用避障算法(如局部代价地图或全局代价地图)避开障碍物;
- 控制机器人沿着局部路径运动;
- 不断重复上述过程,实现机器人在未知环境中的自主导航。
move_base功能包的优点是能够实现高效、可靠的机器人导航,并且可以结合不同的路径规划算法和避障算法,适用于不同的环境和应用场景。此外,move_base功能包还支持多种机器人操作系统和硬件平台,具有良好的兼容性和可扩展性。
move_base功能包在机器人导航中得到了广泛应用,是一种具有广泛应用前景的导航功能包。但是,move_base功能包也存在一些挑战,如对地图精度、障碍物形状和机器人动态特性的考虑等问题,需要进一步研究和改进。
全地形导航-Height Map
在机器人导航中,全地形导航是一种重要的技术,可以使机器人在各种地形中实现自主导航。而Height Map(高度图)是全地形导航中常用的地图类型之一。
Height Map是一种基于高度信息的栅格地图,可以用于表示地形的高度和坡度信息。在机器人导航中,Height Map可以被用来表示机器人所在的环境的地形信息,包括高度、坡度、障碍物等,为机器人的路径规划和避障提供参考。
Height Map是通过在栅格地图上记录高度信息来生成的。在Height Map中,每个栅格都包含一个高度值,表示该栅格所在位置的地面高度。通过对Height Map进行分析和处理,可以得到地形的高度、坡度等信息。这些信息可以用于机器人路径规划和避障,帮助机器人在复杂的地形中实现自主导航。
在全地形导航中,Height Map常常与其他传感器数据(如激光雷达、摄像头等)结合使用,帮助机器人在未知环境中实现自主导航。例如,在无人机导航中,可以利用高度传感器和激光雷达等传感器数据,生成高度图,并结合其他传感器数据,实现无人机的路径规划和避障。
总之,Height Map是全地形导航中常用的地图类型之一,可以帮助机器人在各种地形中实现自主导航。随着机器人技术的不断发展,Height Map在机器人导航中的应用前景也越来越广泛。
全地形导航-Traversability
可通过性检测
Traversability是指机器人在不同地形中的通过能力,是全地形导航中的一个重要概念。在机器人导航中,Traversability被用来描述机器人在不同地形中的可行性,例如机器人能否通过某个地形障碍物、机器人能否在某个地形上稳定行走等。
Traversability通常与地形特征和机器人的运动特性有关。例如,机器人在平坦地面上的行走速度和在崎岖地形上的行走速度可能会存在差异。因此,在进行全地形导航时,需要对地形进行Traversability评估,以帮助机器人规划最优路径,并避开不可行走的地形。
Traversability评估可以使用多种方法,例如基于高度图的方法、基于机器学习的方法等。其中,基于高度图的方法是最常用的方法之一。在基于高度图的方法中,可以通过对高度图进行分析和处理,得到地形的坡度、凸起、凹陷等信息,并根据这些信息进行Traversability评估。
在机器人导航中,Traversability评估可以帮助机器人规划最优路径,并避开不可行走的地形。例如,在无人车导航中,可以使用Traversability评估来避开不可行走的区域,确保无人车在不同地形中的安全行驶。
总之,Traversability是全地形导航中的一个重要概念,可以帮助机器人在不同地形中实现自主导航。随着机器人技术的不断发展,Traversability评估在机器人导航中的应用前景也越来越广泛。
4 全地形导航-3D Path
空间规划
高程计算
在全地形导航中,3D Path是指一条在三维空间中的路径,可以用于指导机器人在不同地形中的自主导航。与传统的2D路径规划相比,3D Path可以更准确地反映地形的高度和坡度信息,帮助机器人更好地避开障碍物、规划最优路径。
3D Path的生成通常需要结合高度图和机器人运动特性等信息。在生成3D Path时,首先需要进行路径规划,得到机器人的2D路径,然后根据高度图和机器人运动特性,将2D路径转化为3D Path。在3D Path的生成过程中,需要考虑机器人的高度、最大坡度、最大爬升高度等限制条件,以确保机器人能够安全、稳定地行走。
在机器人导航中,3D Path常常与其他技术(如避障、Traversability评估等)结合使用,帮助机器人在不同地形中实现自主导航。例如,在无人机导航中,可以使用3D Path来规划无人机的飞行路径,并结合激光雷达等传感器数据,避开障碍物,确保无人机的安全飞行。
总之,3D Path是全地形导航中的一个重要概念,可以帮助机器人在不同地形中实现自主导航。随着机器人技术的不断发展,3D Path在机器人导航中的应用前景也越来越广泛。