20_FreeRTOS低功耗模式

目录
STM32低功耗模式
Tickless模式详解
Tickless模式相关配置
实验源码
低功耗模式简介
很多应用场合对于功耗的要求很严格,比如可穿戴低功耗产品、物联网低功耗产品等。
一般MCU都有相应的低功耗模式,裸机开发时可以使用MCU的低功耗模式。
FreeRTOS也提供了一个叫Tickless的低功耗模式,方便带FreeRTOS操作系统的应用开发。
STM32低功耗模式
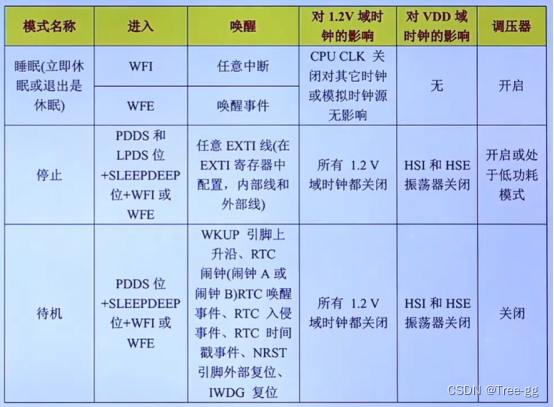
使用内核指令WFI指令进入睡眠模式_WFI,唤醒睡眠模式任意中断
使用内核指令WFE指令进入睡眠模式,唤醒睡眠模式唤醒事件
Tickless模式详解
Tickless低功耗模式的本质是通过调用指令WFI实现睡眠模式!
为了可以降低功耗,又不影响系统运行,可以在本该空闲任务执行的期间,让MCU 进入相应的低功耗模式,当其他任务准备运行的时候,唤醒MCU退出低功耗模式。
难点:
1.进入低功耗之后,多久唤醒?也就是下一个要运行的任务如何被准确唤醒
2.任何中断均可唤醒MCU,若滴答定时器频繁中断则会影响低功耗的效果?
将滴答定时器的中断周期修改为低功耗运行时间,退出低功耗后,需补上系统时钟节拍数。
FreeRTOS的低功耗Tickless 模式机制已经处理好了这些难点。
Tickless模式相关配置
此宏用于使能低功耗Tickless模式
configUSE_TICKLESS_IDLE
此宏用于定义系统进入相应低功耗模式的最短时长
configEXPECTED_IDLE_TIME_BEFORE_SLEEP
此宏用于定义需要在系统进入低功耗模式前执行的事务,如:进入低功耗前关闭外设时钟,以达到降低功耗的目的。
configPRE_SLEEP_PROCESSING(x)
此宏用于定义需要在系统退出低功耗模式后执行的事务,如:退出低功耗后开启之前关闭的外设时钟,以使系统能够正常运行
configPOST_SLEEP_PROCESSING(x)
实验源码
将在二值信号量源码中,加入低功耗模式,最后对比这个两个实验的功耗结果,观察Tickless模式对于降低功耗是否有用。(需要检测功耗仪器来测)
/* @file : user_mian.h* @brief : V1.00* @attention//* Include 包含---------------------------------------------------------------*/
#include "stm32f10x.h"
#include <stdbool.h>
#include "user_gpio.h"
#include "user_delay.h"
#include "user_rcc_config.h"
#include "user_uart.h"
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
#include "user_key.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/*自己定义关闭外设时钟*/
#define configPRE_SLEEP_PROCESSING( x ) PRE_SLEEP_PROCESSING()
/*自己定义开启外设时钟*/
#define configPOST_SLEEP_PROCESSING( x ) POST_SLEEP_PROCESSING()
/* Variables 变量--------------------------------------------------------------*/
/*二值信号量句柄*/
QueueHandle_t semphore_handle;
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*///任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);//任务优先级
#define TASK1_PRIO 2
//任务堆栈大小
#define TASK1_STK_SIZE 100
//任务句柄
TaskHandle_t Task1_Handler;
//任务函数
void task1(void *pvParameters);//任务优先级
#define TASK2_PRIO 3
//任务堆栈大小
#define TASK2_STK_SIZE 100
//任务句柄
TaskHandle_t Task2_Handler;
//任务函数
void task2(void *pvParameters);/*! \\brief 进入低功耗前关闭外设时钟\\param[in] none\\param[out] none\\retval none
*/
void PRE_SLEEP_PROCESSING(void)
{/*关闭GPIO时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOD |RCC_APB2Periph_GPIOE | RCC_APB2Periph_GPIOF |RCC_APB2Periph_GPIOG ,DISABLE);/*关闭UART1时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,DISABLE);}/*!\\brief 进入低功耗前开启外设时钟\\param[in] none\\param[out] none\\retval none
*/
void POST_SLEEP_PROCESSING(void)
{/*开启GPIO时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOD |RCC_APB2Periph_GPIOE | RCC_APB2Periph_GPIOF |RCC_APB2Periph_GPIOG ,ENABLE);/*开启UART1时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);}int main(void){ /*配置系统中断分组为4位抢占*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);/*延时函数初始化*/delay_init();/*RCC配置*/Rcc_config();/*GPIO初始化*/ Gpio_Init();/*USART1初始化*/Uart1_Init(9600);/*创建二值信号量*/semphore_handle = xSemaphoreCreateBinary(); if(semphore_handle == NULL){printf("二值信号量创建不成功\\r\\n\\r\\n");}else{printf("二值信号量创建成功\\r\\n\\r\\n");}/*创建开始任务*/xTaskCreate((TaskFunction_t )start_task, //任务函数(const char* )"start_task", //任务名称(uint16_t )START_STK_SIZE, //任务堆栈大小(void* )NULL, //传递给任务函数的参数(UBaseType_t )START_TASK_PRIO, //任务优先级(TaskHandle_t* )&StartTask_Handler); //任务句柄 vTaskStartScheduler(); //开启任务调度}/*!\\brief 开始任务函数\\param[in] 传递形参,创建任务时用户自己传入\\param[out] none\\retval none
*/
void start_task(void *pvParameters)
{taskENTER_CRITICAL(); //进入临界区//创建任务1xTaskCreate((TaskFunction_t )task1, (const char* )"task1", (uint16_t )TASK1_STK_SIZE, (void* )NULL, (UBaseType_t )TASK1_PRIO, (TaskHandle_t* )&Task1_Handler); //创建任务2xTaskCreate((TaskFunction_t )task2, (const char* )"task2", (uint16_t )TASK2_STK_SIZE, (void* )NULL,(UBaseType_t )TASK2_PRIO,(TaskHandle_t* )&Task2_Handler); vTaskDelete(StartTask_Handler); //删除开始任务taskEXIT_CRITICAL(); //退出临界区
}/*!\\brief task1释放二值信号量\\param[in] 传递形参,创建任务时用户自己传入\\param[out] none\\retval none
*/
void task1(void *pvParameters)
{uint8_t key = 0;BaseType_t err;while(1){ /*获取按键值*/key = Key_Scan(0);if(key == KEY0_PRES){if(semphore_handle != NULL){ err = xSemaphoreGive(semphore_handle);if(err == pdPASS){printf("信号量释放成功\\r\\n\\r\\n");}else{printf("信号量释放失败\\r\\n\\r\\n");}} }vTaskDelay(100);}
} /*!\\brief task2获取二值信号量\\param[in] 传递形参,创建任务时用户自己传入\\param[out] none\\retval none
*/
void task2(void *pvParameters)
{while(1){/*获取信号量死等,进入阻塞态*/xSemaphoreTake(semphore_handle,portMAX_DELAY);printf("获取信号量成功!!!\\r\\n\\r\\n");}
}/ END OF FILE /