手把手教你搭建ROS阿克曼转向小车之(霍尔编码器数据读取与速度计算)

上一篇文章已经介绍了如何驱动直流有刷电机转动起来,这篇文章讲解如何获取编码器的计数值,并且计算出速度信息。在实际的运行中,随着机器的重量不一样,电机受到的阻力就会不一样,给定同样的PWM在不同载重的情况下速度会不一样,要解决这个问题就需要引入反馈系统,使用PID进行调节,通过期望值和反馈值的信息动态的去调整PWM值,从而保证速度满足期望值的要求,而反馈值就是需要通过编码器来进行计算。
硬件介绍
控制器的编码器端口如下图所示:
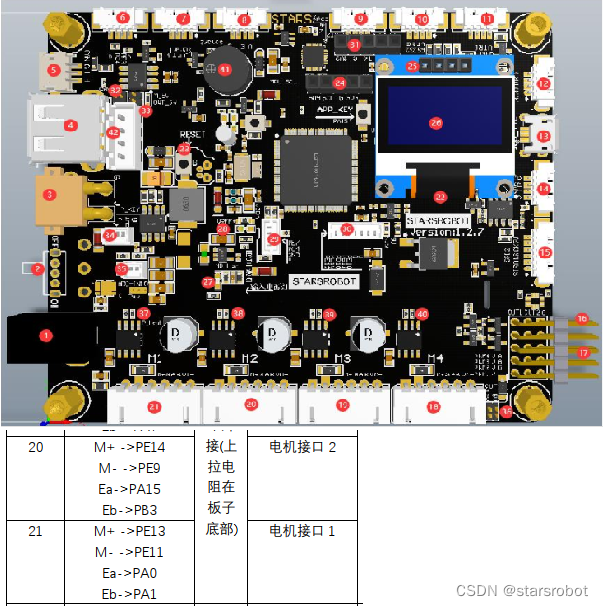
其中PA0是定时器5的CH1、PA1是定时器5的CH2;PA15是定时器2的CH1、PB3是定时器2的CH2,定时器的编码器模式只能接在CH1和CH2端口上,STM32定时器的编码器模式原理需要大家自行去阅读手册,博文只讲解代码实现。
初始化代码
初始化代码在HwConfig/hw_STM32F40x.c中:
void EncoderInit(uint8_t eName_t,uint8_t mMotorType){GPIO_TypeDef* ENCODER_A_PORT[ENCODERn] = {STARBOT_ENCODER1_A_GPIO_PORT, STARBOT_ENCODER2_A_GPIO_PORT, STARBOT_ENCODER3_A_GPIO_PORT, STARBOT_ENCODER4_A_GPIO_PORT};GPIO_TypeDef* ENCODER_B_PORT[ENCODERn] = {STARBOT_ENCODER1_B_GPIO_PORT, STARBOT_ENCODER2_B_GPIO_PORT, STARBOT_ENCODER3_B_GPIO_PORT, STARBOT_ENCODER4_B_GPIO_PORT};TIM_TypeDef* ENCODER_TIM[ENCODERn] = {STARBOT_ENCODER1_TIM, STARBOT_ENCODER2_TIM, STARBOT_ENCODER3_TIM, STARBOT_ENCODER4_TIM,};const uint16_t ENCODER_TIR[ENCODERn] = {STARBOT_ENCODER1_TIR,STARBOT_ENCODER2_TIR,STARBOT_ENCODER3_TIR,STARBOT_ENCODER4_TIR};const uint32_t ENCODER_TIM_CLK[ENCODERn] = {STARBOT_ENCODER1_TIM_CLK, STARBOT_ENCODER2_TIM_CLK, STARBOT_ENCODER3_TIM_CLK, STARBOT_ENCODER4_TIM_CLK};const uint16_t ENCODER_GPIO_AF_TIM[ENCODERn] = {STARBOT_ENCODER1_GPIO_AF_TIM,STARBOT_ENCODER2_GPIO_AF_TIM,STARBOT_ENCODER3_GPIO_AF_TIM,STARBOT_ENCODER4_GPIO_AF_TIM};uint32_t ENCODER_A_PORT_CLK[ENCODERn] = {STARBOT_ENCODER1_A_GPIO_CLK, STARBOT_ENCODER2_A_GPIO_CLK, STARBOT_ENCODER3_A_GPIO_CLK, STARBOT_ENCODER4_A_GPIO_CLK,};uint32_t ENCODER_B_PORT_CLK[ENCODERn] = {STARBOT_ENCODER1_B_GPIO_CLK,STARBOT_ENCODER2_B_GPIO_CLK,STARBOT_ENCODER3_B_GPIO_CLK,STARBOT_ENCODER4_B_GPIO_CLK};uint16_t ENCODER_A_PIN[ENCODERn] = {STARBOT_ENCODER1_A_PIN, STARBOT_ENCODER2_A_PIN, STARBOT_ENCODER3_A_PIN, STARBOT_ENCODER4_A_PIN,};uint16_t ENCODER_B_PIN[ENCODERn] = {STARBOT_ENCODER1_B_PIN, STARBOT_ENCODER2_B_PIN, STARBOT_ENCODER3_B_PIN, STARBOT_ENCODER4_B_PIN};uint16_t ENCODER_A_GPIO_PinSource[ENCODERn] ={STARBOT_ENCODER1_A_GPIO_PinSource,STARBOT_ENCODER2_A_GPIO_PinSource,STARBOT_ENCODER3_A_GPIO_PinSource,STARBOT_ENCODER4_A_GPIO_PinSource};uint16_t ENCODER_B_GPIO_PinSource[ENCODERn] ={STARBOT_ENCODER1_B_GPIO_PinSource,STARBOT_ENCODER2_B_GPIO_PinSource,STARBOT_ENCODER3_B_GPIO_PinSource,STARBOT_ENCODER4_B_GPIO_PinSource};TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_ICInitTypeDef TIM_ICInitStructure; NVIC_InitTypeDef NVIC_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB1PeriphClockCmd(ENCODER_TIM_CLK[eName_t], ENABLE); RCC_AHB1PeriphClockCmd(ENCODER_A_PORT_CLK[eName_t]|ENCODER_B_PORT_CLK[eName_t], ENABLE);GPIO_InitStructure.GPIO_Pin = ENCODER_A_PIN[eName_t];GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;GPIO_Init(ENCODER_A_PORT[eName_t], &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = ENCODER_B_PIN[eName_t]; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;GPIO_Init(ENCODER_B_PORT[eName_t], &GPIO_InitStructure); GPIO_PinAFConfig(ENCODER_A_PORT[eName_t],ENCODER_A_GPIO_PinSource[eName_t],ENCODER_GPIO_AF_TIM[eName_t]); GPIO_PinAFConfig(ENCODER_B_PORT[eName_t],ENCODER_B_GPIO_PinSource[eName_t],ENCODER_GPIO_AF_TIM[eName_t]); TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // No prescaling //不分频if(ENCODER1 == eName_t || ENCODER2 == eName_t){TIM_TimeBaseStructure.TIM_Period = 0xffffffff; //设定计数器自动重装值} else {TIM_TimeBaseStructure.TIM_Period = 0xffff; //设定计数器自动重装值}TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //选择时钟分频:不分频TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数 TIM_TimeBaseInit(ENCODER_TIM[eName_t], &TIM_TimeBaseStructure); //初始化定时器TIM_EncoderInterfaceConfig(ENCODER_TIM[eName_t], TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising); //使用编码器模式3TIM_ICStructInit(&TIM_ICInitStructure);TIM_ICInitStructure.TIM_ICFilter = 6;TIM_ICInit(ENCODER_TIM[eName_t], &TIM_ICInitStructure);TIM_SetCounter(ENCODER_TIM[eName_t],0);TIM_ITConfig(ENCODER_TIM[eName_t], TIM_IT_Update, ENABLE);TIM_ClearITPendingBit(ENCODER_TIM[eName_t], TIM_IT_Update); //清除TIM的更新标志位TIM_ClearFlag(ENCODER_TIM[eName_t], TIM_FLAG_Update); //清除TIM的更新标志位TIM_Cmd(ENCODER_TIM[eName_t], ENABLE);NVIC_InitStructure.NVIC_IRQChannel=ENCODER_TIR[eName_t]; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=6;NVIC_InitStructure.NVIC_IRQChannelSubPriority=0; NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;NVIC_Init(&NVIC_InitStructure);
}定时器2和定时器5是32位定时器,所以设置计数为0xFFFFFFFF,然后我们还需要在溢出中断里对溢出次数进行处理,和需要一个定时器定时去计算单位时间内编码器的增量,然后换算为速度值。
溢出处理
溢出处理的代码在APP/moveBase_Task.cpp中:
void TIM2_IRQHandler(void)
{ if(TIM2->SR&0X0001)//溢出中断{ if((TIM2->CR1 & 0x10) == 0x10){OverEnc2--;}else{OverEnc2++;} } TIM2->SR&=~(1<<0);//清除中断标志位
}
void TIM5_IRQHandler(void)
{ if(TIM5->SR&0X0001)//溢出中断{ if((TIM5->CR1 & 0x10) == 0x10){OverEnc1--;}else{OverEnc1++;} } TIM5->SR&=~(1<<0);//清除中断标志位
}需要判断是向上溢出还是向下溢出,然后对溢出次数进行处理,处理完溢出后我们还需要一个定时器来计算他的单位时间内的增量,博主使用的是定时器6。
速度计算定时器初始化
定时器6的初始化代码在HwConfig/hw_STM32F40x.c中:
void BaseBoard_TIM6_Init(void){ //10msTIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;NVIC_InitTypeDef NVIC_InitStructure;//84MHzRCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6,ENABLE); TIM_TimeBaseInitStructure.TIM_Period = 83; TIM_TimeBaseInitStructure.TIM_Prescaler=9999; TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM6,&TIM_TimeBaseInitStructure);TIM_ITConfig(TIM6,TIM_IT_Update,ENABLE); TIM_Cmd(TIM6,ENABLE); NVIC_InitStructure.NVIC_IRQChannel=TIM6_DAC_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x00;NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x00; NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;NVIC_Init(&NVIC_InitStructure);
}这里给定定时器的周期是10ms,即100HZ,大家可以根据自己的需要进行修改,然后在定时器6的中断函数中对编码器数据进行处理。
编码器数据处理
编码器数据处理的代码在APP/moveBase_Task.cpp中:
void TIM6_DAC_IRQHandler(void)
{ if(TIM_GetITStatus(TIM6,TIM_IT_Update)==SET) {encPIDCnt++;if(encPIDCnt >= DELTA_CNT){ // DELTA_CNT = 10编码器采样周期 10 x 10ms = 100msif(MotorType_t != M_CAN_1_2){ gCurrentEnc1 = (int64_t)(((TIM5 -> CNT)) + OverEnc1*0xffffffff);gCurrentEnc2 = (int64_t)(((TIM2 -> CNT)) + OverEnc2*0xffffffff);if(lastCurrentEnc1 == 0){lastCurrentEnc1 = gCurrentEnc1;}delta_ticks_1 = gCurrentEnc1 - lastCurrentEnc1;lastCurrentEnc1 = gCurrentEnc1;if(lastCurrentEnc2 == 0){lastCurrentEnc2 = gCurrentEnc2;}delta_ticks_2 = gCurrentEnc2 - lastCurrentEnc2;lastCurrentEnc2 = gCurrentEnc2;Motor_Rpm.MotorEncoder1 += delta_ticks_1;Motor_Rpm.MotorEncoder2 += delta_ticks_2;Motor_Rpm.Current_Rpm1 = (delta_ticks_1*600/Time_counts_per_rev);Motor_Rpm.Current_Rpm2 = (delta_ticks_2*600/Time_counts_per_rev);}moveBase_Manage();encPIDCnt = 1;}} TIM_ClearITPendingBit(TIM6,TIM_IT_Update);
}rpm的计算公式为:分钟内编码器的增量/输出轴转一圈编码器的计数值,我们这里是100ms计算一次,因此单位时间要进行转换:1min = 60s=60000ms 所以需要乘上600就可以得到RPM值。如果文章有错误欢迎大家及时纠正,感谢大家的支持