
·Publisher 的调试 :Rostopic
·查看消息类型:rosmsg
·用命令行调试订阅:rostopic pub /motor std_msgs/Int32 “data:2000”
·查看当前节点:rosnode list
·启动GUI来调试电机等:rosrun rqt_topic rqt_topic
·创建新ROS功能包:catkin_create_pkg 自定义包名 依赖项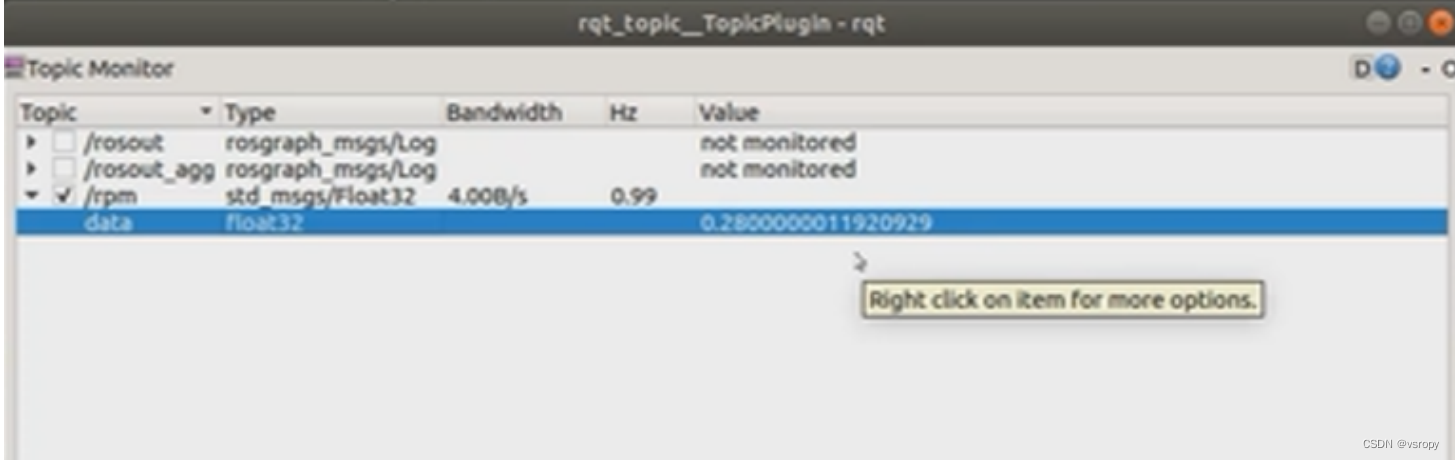
·安装ROS功能包:sudo apt install xxx
·删除某个功能包:sudo apt purge xxx