Linux驱动开发——串口设备驱动

Linux驱动开发——串口设备驱动
一、串口简介
串口全称叫做串行接口,通常也叫做 COM 接口,串行接口指的是数据一个一个的顺序传输,通信线路简单。使用两条线即可实现双向通信,一条用于发送,一条用于接收。串口通信距离远,但是速度相对会低,串口是一种很常用的工业接口。
I.MX6U 自带的 UART 外设就是串口的一种,UART 全称是 Universal Asynchronous Receiver/Trasmitter,也就是异步串行收发器。UART 作为串口的一种,其工作原理也是将数据一位一位的进行传输,发送和接收各用一条线,因此通过 UART 接口与外界相连最少只需要三条线:TXD(发送)、RXD(接收)和 GND(地线)
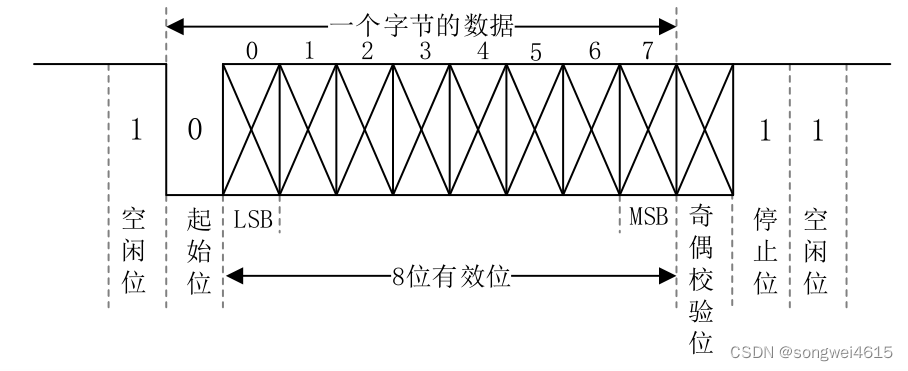
- 空闲位:数据线在空闲状态的时候为逻辑“1”状态,也就是高电平,表示没有数据线空闲,没有数据传输。
- 起始位:当要传输数据的时候先传输一个逻辑“0”,也就是将数据线拉低,表示开始数据传输。
- 数据位:数据位就是实际要传输的数据,数据位数可选择 5~8 位,我们一般都是按照字节传输数据的,一个字节 8 位,因此数据位通常是 8 位的。低位在前,先传输,高位最后传输。
- 奇偶校验位:这是对数据中“1”的位数进行奇偶校验用的,可以不使用奇偶校验功能。
- 停止位:数据传输完成标志位,停止位的位数可以选择 1 位、1.5 位或 2 位高电平,一般都选择 1 位停止位。
- 波特率:波特率就是 UART 数据传输的速率,也就是每秒传输的数据位数,一般选择 9600、19200、115200 等。
二、Linux下串口驱动框架
Linux 提供了串口驱动框架,我们只需要按照相应的串口框架编写驱动程序即可。串口驱动没有什么主机端和设备端之分,就只有一个串口驱动,而且这个驱动也已经由 NXP 官方已经编写好了,我们真正要做的就是在设备树中添加所要使用的串口节点信息。当系统启动以后串口驱动和设备匹配成功,相应的串口就会被驱动起来,生成/dev/ttymxcX(X=0….n)文件。
uart_driver 结构体
uart_driver 结构体表示 UART 驱动,uart_driver 定义在 include/linux/serial_core.h 文件中
struct uart_driver
{struct module *owner; /* 模块所属者 */const char *driver_name; /* 驱动名字 */const char *dev_name; /* 设备名字 */int major; /* 主设备号 */int minor; /* 次设备号 */int nr; /* 设备数 */struct console *cons; /* 控制台 *// these are private; the low level driver should not* touch these; they should be initialised to NULL*/struct uart_state *state;struct tty_driver *tty_driver;
};
- 加载驱动的时候通过 uart_register_driver 函数向系统注册这个 uart_driver,此函数原型如下:
int uart_register_driver(struct uart_driver *drv)
函数参数和返回值含义如下:
- drv :要注册的 uart_driver。
- 返回值:0,成功;负值,失败。
- 注销驱动的时候也需要注销掉前面注册的 uart_driver,需要用到 uart_unregister_driver 函数,函数原型如下:
void uart_unregister_driver(struct uart_driver *drv)
函数参数和返回值含义如下:
- drv :要注销的 uart_driver。
- 返回值:无。
uart_port 的添加与移除
uart_port 表示一个具体的 port,uart_port 定义在 include/linux/serial_core.h 文件
117 struct uart_port {
118 spinlock_t lock; /* port lock */
119 unsigned long iobase; /* in/out[bwl] */
120 unsigned char __iomem *membase; /* read/write[bwl] */
......
235 const struct uart_ops *ops;
236 unsigned int custom_divisor;
237 unsigned int line; /* port index */
238 unsigned int minor;
239 resource_size_t mapbase; /* for ioremap */
240 resource_size_t mapsize;
241 struct device *dev; /* parent device */
......
250 };
uart_port 中最主要的就是第 235 行的 ops,ops 包含了串口的具体驱动函数,UART 驱动编写人员需要实现 uart_ops,因为 uart_ops 是最底层的 UART 驱动接口,是实实在在的和 UART 寄存器打交道的。
- 那么 uart_port 是怎么和 uart_driver 结合起来,用到 uart_add_one_port 函数函数原型如下:
int uart_add_one_port(struct uart_driver *drv,struct uart_port *uport)
函数参数和返回值含义如下:
- drv:此 port 对应的 uart_driver。
- uport :要添加到 uart_driver 中的 port。
- 返回值:0,成功;负值,失败。
- 卸载 UART 驱动的时候也需要将 uart_port 从相应的 uart_driver 中移除,需要用到uart_remove_one_port 函数,函数原型如下:
int uart_remove_one_port(struct uart_driver *drv, struct uart_port *uport)
函数参数和返回值含义如下:
- drv:要卸载的 port 所对应的 uart_driver。
- uport :要卸载的 uart_port。
- 返回值:0,成功;负值,失败。
三、Linux下串口驱动工作流程
- UART 本质上是一个 platform 驱动
- platform 驱动框架结构体 serial_imx_driver
- 在驱动入口函数中调用uart_register_driver 函数向 Linux 内核注册 uart_driver
- 在驱动出口函数中调用uart_unregister_driver 函数注销掉前面注册的 uart_driver
- UART 设备和驱动匹配成功以后 serial_imx_probe 函数就会执行,此函数的重点工作就是初始化 uart_port,然后将其添加到对应的 uart_driver 中
- 在初始化uart_port过程中,设置 uart_ops 为 imx_pops。imx_pops 就是 I.MX6ULL 最底层的驱动函数集合。
四、Linux下串口应用开发
串口的应用编程就是通过 ioctl()对串口进行配置,调用 read()读取串口的数据、调用 write()向串口写入数据。
Linux 为上层用户做了一层封装,将这些 ioctl()操作封装成了一套标准的 API,这些 API 其实是 C 库函数。
- 这一套接口并不是针对串口开发的,而是针对所有的终端设备,串口是一种终端设备,计算机系统本地连接的鼠标、键盘也是终端设备,通过 ssh 远程登录连接的伪终端也是终端设备
- 使用 termios API,需要在我们的应用程序中包含 termios.h 头文件
终端工作模式
- 规范模式
- 基于行进行处理的。在用户输入一个行结束符(回车符、EOF 等)之前,系统调用 read()函数是读不到用户输入的任何字符的
- 非规范模式
- 所有的输入是即时有效的,不需要用户另外输入行结束符,而且不可进行行编辑
- 原始模式
- 是一种特殊的非规范模式。在原始模式下,所有的输入数据以字节为单位被处理。在这个模式下,终端是不可回显的,并且禁用终端输入和输出字符的所有特殊处理。调用 cfmakeraw()函数将终端设置为原始模式
多线程例程
#define _GNU_SOURCE //在源文件开头定义_GNU_SOURCE宏
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <errno.h>
#include <string.h>
#include <signal.h>
#include <termios.h>
#include <pthread.h>typedef struct uart_hardware_cfg {unsigned int baudrate; /* 波特率 */unsigned char dbit; /* 数据位 */char parity; /* 奇偶校验 */unsigned char sbit; /* 停止位 */
} uart_cfg_t;static struct termios old_cfg; //用于保存终端的配置参数
static int fd; //串口终端对应的文件描述符/ 串口初始化操作 参数device表示串口终端的设备节点/
static int uart_init(const char *device)
{/* 打开串口终端 */fd = open(device, O_RDWR | O_NOCTTY);if (0 > fd) {fprintf(stderr, "open error: %s: %s\\n", device, strerror(errno));return -1;}/* 获取串口当前的配置参数 */if (0 > tcgetattr(fd, &old_cfg)) {fprintf(stderr, "tcgetattr error: %s\\n", strerror(errno));close(fd);return -1;}return 0;
}/ 串口配置 参数cfg指向一个uart_cfg_t结构体对象/
static int uart_cfg(const uart_cfg_t *cfg)
{struct termios new_cfg = {0}; //将new_cfg对象清零speed_t speed;/* 设置为原始模式 */cfmakeraw(&new_cfg);/* 使能接收 */new_cfg.c_cflag |= CREAD;/* 设置波特率 */switch (cfg->baudrate) {case 1200: speed = B1200;break;case 1800: speed = B1800;break;case 2400: speed = B2400;break;case 4800: speed = B4800;break;case 9600: speed = B9600;break;case 19200: speed = B19200;break;case 38400: speed = B38400;break;case 57600: speed = B57600;break;case 115200: speed = B115200;break;case 230400: speed = B230400;break;case 460800: speed = B460800;break;case 500000: speed = B500000;break;default: //默认配置为115200speed = B115200;printf("default baud rate: 115200\\n");break;}if (0 > cfsetspeed(&new_cfg, speed)) {fprintf(stderr, "cfsetspeed error: %s\\n", strerror(errno));return -1;}/* 设置数据位大小 */new_cfg.c_cflag &= ~CSIZE; //将数据位相关的比特位清零switch (cfg->dbit) {case 5:new_cfg.c_cflag |= CS5;break;case 6:new_cfg.c_cflag |= CS6;break;case 7:new_cfg.c_cflag |= CS7;break;case 8:new_cfg.c_cflag |= CS8;break;default: //默认数据位大小为8new_cfg.c_cflag |= CS8;printf("default data bit size: 8\\n");break;}/* 设置奇偶校验 */switch (cfg->parity) {case 'N': //无校验new_cfg.c_cflag &= ~PARENB;new_cfg.c_iflag &= ~INPCK;break;case 'O': //奇校验new_cfg.c_cflag |= (PARODD | PARENB);new_cfg.c_iflag |= INPCK;break;case 'E': //偶校验new_cfg.c_cflag |= PARENB;new_cfg.c_cflag &= ~PARODD; /* 清除PARODD标志,配置为偶校验 */new_cfg.c_iflag |= INPCK;break;default: //默认配置为无校验new_cfg.c_cflag &= ~PARENB;new_cfg.c_iflag &= ~INPCK;printf("default parity: N\\n");break;}/* 设置停止位 */switch (cfg->sbit) {case 1: //1个停止位new_cfg.c_cflag &= ~CSTOPB;break;case 2: //2个停止位new_cfg.c_cflag |= CSTOPB;break;default: //默认配置为1个停止位new_cfg.c_cflag &= ~CSTOPB;printf("default stop bit size: 1\\n");break;}/* 将MIN和TIME设置为0 */new_cfg.c_cc[VTIME] = 0;new_cfg.c_cc[VMIN] = 0;/* 清空缓冲区 */if (0 > tcflush(fd, TCIOFLUSH)) {fprintf(stderr, "tcflush error: %s\\n", strerror(errno));return -1;}/* 写入配置、使配置生效 */if (0 > tcsetattr(fd, TCSANOW, &new_cfg)) {fprintf(stderr, "tcsetattr error: %s\\n", strerror(errno));return -1;}/* 配置OK 退出 */return 0;
}/*
--dev=/dev/ttymxc2
--brate=115200
--dbit=8
--parity=N
--sbit=1
--type=read
*/
/ 打印帮助信息/
static void show_help(const char *app)
{printf("Usage: %s [选项]\\n""\\n必选选项:\\n"" --dev=DEVICE 指定串口终端设备名称, 譬如--dev=/dev/ttymxc2\\n""\\n可选选项:\\n"" --brate=SPEED 指定串口波特率, 譬如--brate=115200\\n"" --dbit=SIZE 指定串口数据位个数, 譬如--dbit=8(可取值为: 5/6/7/8)\\n"" --parity=PARITY 指定串口奇偶校验方式, 譬如--parity=N(N表示无校验、O表示奇校验、E表示偶校验)\\n"" --sbit=SIZE 指定串口停止位个数, 譬如--sbit=1(可取值为: 1/2)\\n"" --help 查看本程序使用帮助信息\\n\\n", app);
}/ 信号处理函数,当串口有数据可读时,会跳转到该函数执行/
static void io_handler(int sig, siginfo_t *info, void *context)
{unsigned char buf[10] = {0};int ret;int n;if(SIGRTMIN != sig)return;/* 判断串口是否有数据可读 */if (POLL_IN == info->si_code) {ret = read(fd, buf, 8); //一次最多读8个字节数据printf("[ ");for (n = 0; n < ret; n++)printf("0x%hhx ", buf[n]);printf("]\\n");}
}/ 异步I/O初始化函数/
static void async_io_init(void)
{struct sigaction sigatn;int flag;/* 使能异步I/O */flag = fcntl(fd, F_GETFL); //使能串口的异步I/O功能flag |= O_ASYNC;fcntl(fd, F_SETFL, flag);/* 设置异步I/O的所有者 */fcntl(fd, F_SETOWN, getpid());/* 指定实时信号SIGRTMIN作为异步I/O通知信号 */fcntl(fd, F_SETSIG, SIGRTMIN);/* 为实时信号SIGRTMIN注册信号处理函数 */sigatn.sa_sigaction = io_handler; //当串口有数据可读时,会跳转到io_handler函数sigatn.sa_flags = SA_SIGINFO;sigemptyset(&sigatn.sa_mask);sigaction(SIGRTMIN, &sigatn, NULL);
}static void *read_thread(void *arg)
{printf("read_thread , process id=%d , thread id= %lu\\n",getpid(),pthread_self());async_io_init(); //我们使用异步I/O方式读取串口的数据,调用该函数去初始化串口的异步I/Owhile(1) sleep(1); //进入休眠、等待有数据可读,有数据可读之后就会跳转到io_handler()函数return (void *)0;
}
static void *write_thread(void *arg)
{unsigned char w_buf[8] = {0};printf("write_thread , process id=%d , thread id= %lu\\n",getpid(),pthread_self());while(1){scanf("%s",w_buf);write(fd, w_buf, 8); //一次向串口写入8个字节memset(w_buf, 0, sizeof w_buf);}return (void *)0;
}int main(int argc, char *argv[])
{uart_cfg_t cfg = {0};char *device = NULL;int rw_flag = -1;int n;/* 解析出参数 */for (n = 1; n < argc; n++) {if (!strncmp("--dev=", argv[n], 6))device = &argv[n][6];else if (!strncmp("--brate=", argv[n], 8))cfg.baudrate = atoi(&argv[n][8]);else if (!strncmp("--dbit=", argv[n], 7))cfg.dbit = atoi(&argv[n][7]);else if (!strncmp("--parity=", argv[n], 9))cfg.parity = argv[n][9];else if (!strncmp("--sbit=", argv[n], 7))cfg.sbit = atoi(&argv[n][7]);else if (!strcmp("--help", argv[n])) {show_help(argv[0]); //打印帮助信息exit(EXIT_SUCCESS);}}/* 串口初始化 */if (uart_init(device))exit(EXIT_FAILURE);/* 串口配置 */if (uart_cfg(&cfg)) {tcsetattr(fd, TCSANOW, &old_cfg); //恢复到之前的配置close(fd);exit(EXIT_FAILURE);}pthread_t tid1,tid2;int ret = pthread_create(&tid1,NULL,read_thread,NULL);if(ret != 0){fprintf(stderr,"error:%s\\n",strerror(ret));exit(-1);}ret = pthread_create(&tid2,NULL,write_thread,NULL);if(ret != 0){fprintf(stderr,"error:%s\\n",strerror(ret));exit(-1);}while(1);/* 退出 */tcsetattr(fd, TCSANOW, &old_cfg); //恢复到之前的配置close(fd);exit(EXIT_SUCCESS);
}