ROS学习第二十八节——URDF之robot link

1.概述
URDF 文件是一个标准的 XML 文件,在 ROS 中预定义了一系列的标签用于描述机器人模型,机器人模型可能较为复杂,但是 ROS 的 URDF 中机器人的组成却是较为简单,可以主要简化为两部分:连杆(link标签) 与 关节(joint标签),接下来我们就通过案例了解一下 URDF 中的不同标签:
- robot 根标签,类似于 launch文件中的launch标签
- link 连杆标签
- joint 关节标签
- gazebo 集成gazebo需要使用的标签
关于gazebo标签,后期在使用 gazebo 仿真时,才需要使用到,用于配置仿真环境所需参数,比如: 机器人材料属性、gazebo插件等,但是该标签不是机器人模型必须的,只有在仿真时才需设置
另请参考:
- urdf/XML - ROS Wiki
2.robot
robot
urdf 中为了保证 xml 语法的完整性,使用了robot标签作为根标签,所有的 link 和 joint 以及其他标签都必须包含在 robot 标签内,在该标签内可以通过 name 属性设置机器人模型的名称
1.属性
name: 指定机器人模型的名称
2.子标签
其他标签都是子级标签
3.link
link
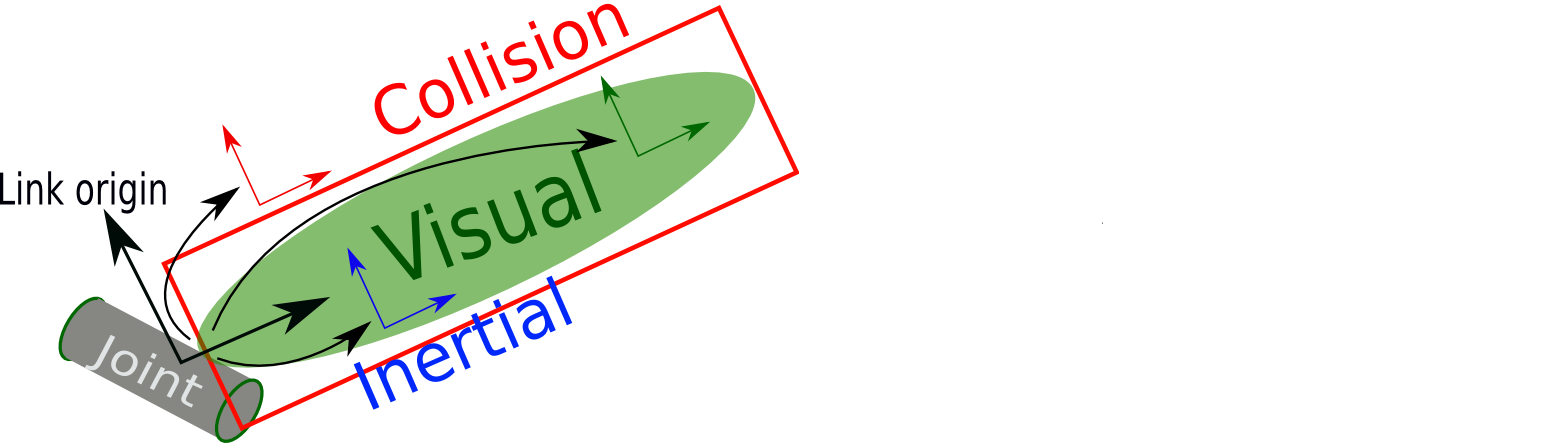
urdf 中的 link 标签用于描述机器人某个部件(也即刚体部分)的外观和物理属性,比如: 机器人底座、轮子、激光雷达、摄像头...每一个部件都对应一个 link, 在 link 标签内,可以设计该部件的形状、尺寸、颜色、惯性矩阵、碰撞参数等一系列属性
 1.属性
1.属性
- name ---> 为连杆命名
2.子标签
-
visual ---> 描述外观(对应的数据是可视的)
-
geometry 设置连杆的形状
-
标签1: box(盒状)
- 属性:size=长(x) 宽(y) 高(z)
-
标签2: cylinder(圆柱)
- 属性:radius=半径 length=高度
-
标签3: sphere(球体)
- 属性:radius=半径
-
标签4: mesh(为连杆添加皮肤)
- 属性: filename=资源路径(格式:package://<packagename>/<path>/文件)
-
-
origin 设置偏移量与倾斜弧度
-
属性1: xyz=x偏移 y便宜 z偏移
-
属性2: rpy=x翻滚 y俯仰 z偏航 (单位是弧度)
-
-
metrial 设置材料属性(颜色)
-
属性: name
-
标签: color
- 属性: rgba=红绿蓝权重值与透明度 (每个权重值以及透明度取值[0,1])
-
-
-
collision ---> 连杆的碰撞属性
-
Inertial ---> 连杆的惯性矩阵
在此,只演示visual使用。
3.案例
需求:分别生成长方体、圆柱与球体的机器人部件
<link name="base_link"><visual><!-- 形状 --><geometry><!-- 长方体的长宽高 --><!-- <box size="0.5 0.3 0.1" /> --><!-- 圆柱,半径和长度 --><!-- <cylinder radius="0.5" length="0.1" /> --><!-- 球体,半径--><!-- <sphere radius="0.3" /> --></geometry><!-- xyz坐标 rpy翻滚俯仰与偏航角度(3.14=180度 1.57=90度) --><origin xyz="0 0 0" rpy="0 0 0" /><!-- 颜色: r=red g=green b=blue a=alpha --><material name="black"><color rgba="0.7 0.5 0 0.5" /></material></visual></link>
实际操作
新建两个文件,注意路径

demo02_link.urdf
<robot name = "mycar"><link name="base_link"><visual><!-- 形状 --><geometry><!-- 长方体的长宽高 --><!-- <box size="0.5 0.3 0.1" /> --><!-- 圆柱,半径和长度 --><!-- <cylinder radius="0.5" length="0.1" /> --><!-- 球体,半径--><sphere radius="0.3" /></geometry><!-- xyz坐标 rpy翻滚俯仰与偏航角度(3.14=180度 1.57=90度) --><origin xyz="0 0 0" rpy="0 0 0" /><!-- 颜色: r=red g=green b=blue a=alpha --><material name="black"><color rgba="0.7 0.5 0 0.5" /></material></visual></link>
</robot>demo02_link.launch
<launch><param name="robot_description" textfile="$(find urdf01_rviz)/urdf/urdf/demo02_link.urdf" /><node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz" />
</launch>
运行下面命令
roslaunch urdf01_rviz demo02_link.launch
加入下载的机器人模型
把这两个文件放到我们建好的工程文件夹里面
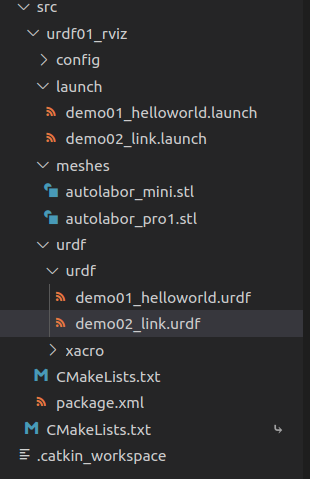
在demo02_link.urdf文件中添加以下标签
<mesh filename = "package://urdf01_rviz/meshes/autolabor_mini.stl"/>
<robot name = "mycar"><link name="base_link"><visual><!-- 形状 --><geometry><!-- 长方体的长宽高 --><!-- <box size="0.5 0.3 0.1" /> --><!-- 圆柱,半径和长度 --><!-- <cylinder radius="0.5" length="0.1" /> --><!-- 球体,半径--><!-- <sphere radius="0.3" /> --><mesh filename = "package://urdf01_rviz/meshes/autolabor_mini.stl"/></geometry><!-- xyz坐标 rpy翻滚俯仰与偏航角度(3.14=180度 1.57=90度) --><origin xyz="0 0 0" rpy="0 0 0" /><!-- 颜色: r=red g=green b=blue a=alpha --><!-- <material name="black"><color rgba="0.7 0.5 0 0.5" /></material> --></visual></link>
</robot>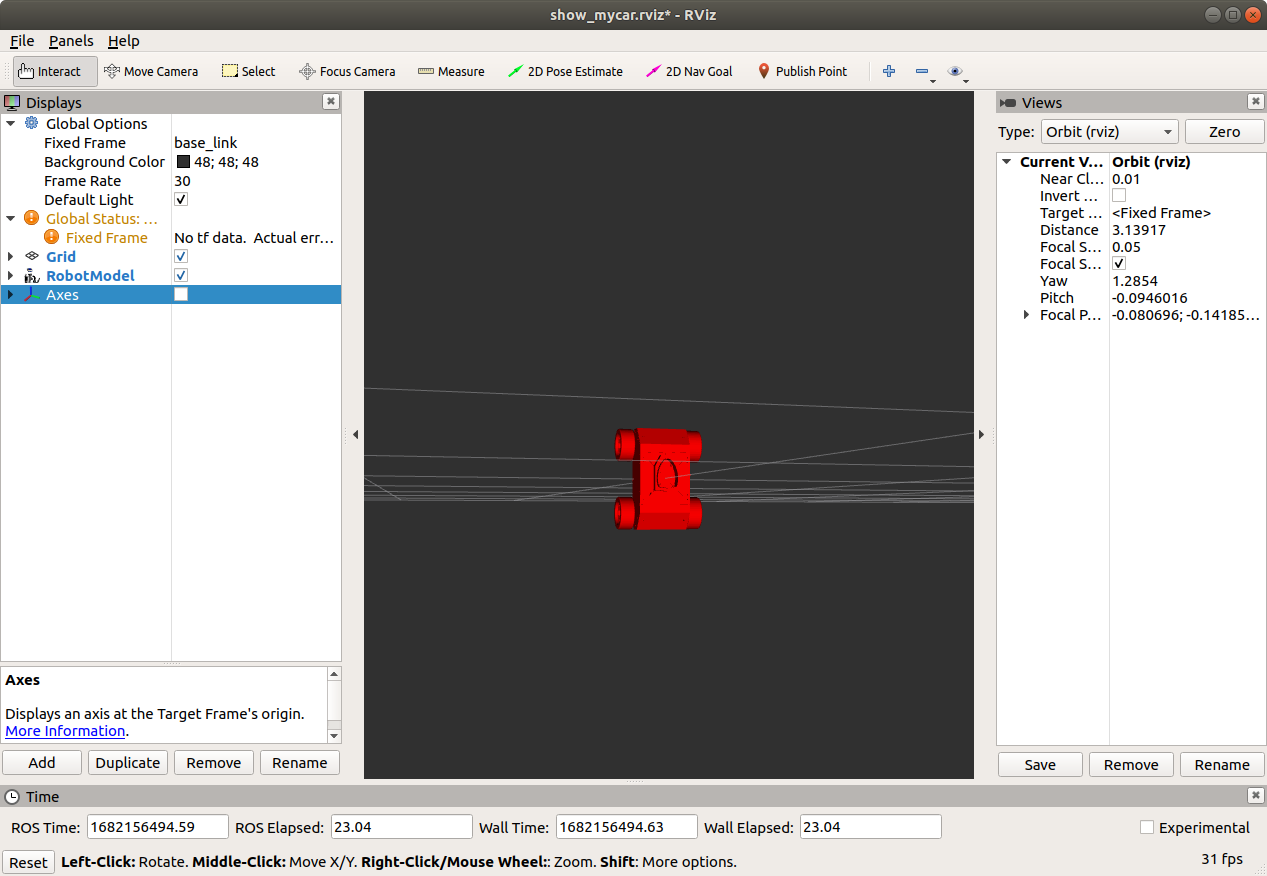
修改“翻车”翻车
使用以下标签是修改小车的位置还有俯仰角
<origin xyz="0 0 0" rpy="1.57 0 0" />
<robot name = "mycar"><link name="base_link"><visual><!-- 形状 --><geometry><!-- 长方体的长宽高 --><!-- <box size="0.5 0.3 0.1" /> --><!-- 圆柱,半径和长度 --><!-- <cylinder radius="0.5" length="0.1" /> --><!-- 球体,半径--><!-- <sphere radius="0.3" /> --><mesh filename = "package://urdf01_rviz/meshes/autolabor_mini.stl"/></geometry><!-- xyz坐标 rpy翻滚俯仰与偏航角度(3.14=180度 1.57=90度) --><origin xyz="0 0 0" rpy="1.57 0 0" /><!-- 颜色: r=red g=green b=blue a=alpha --><!-- <material name="black"><color rgba="0.7 0.5 0 0.5" /></material> --></visual></link>
</robot>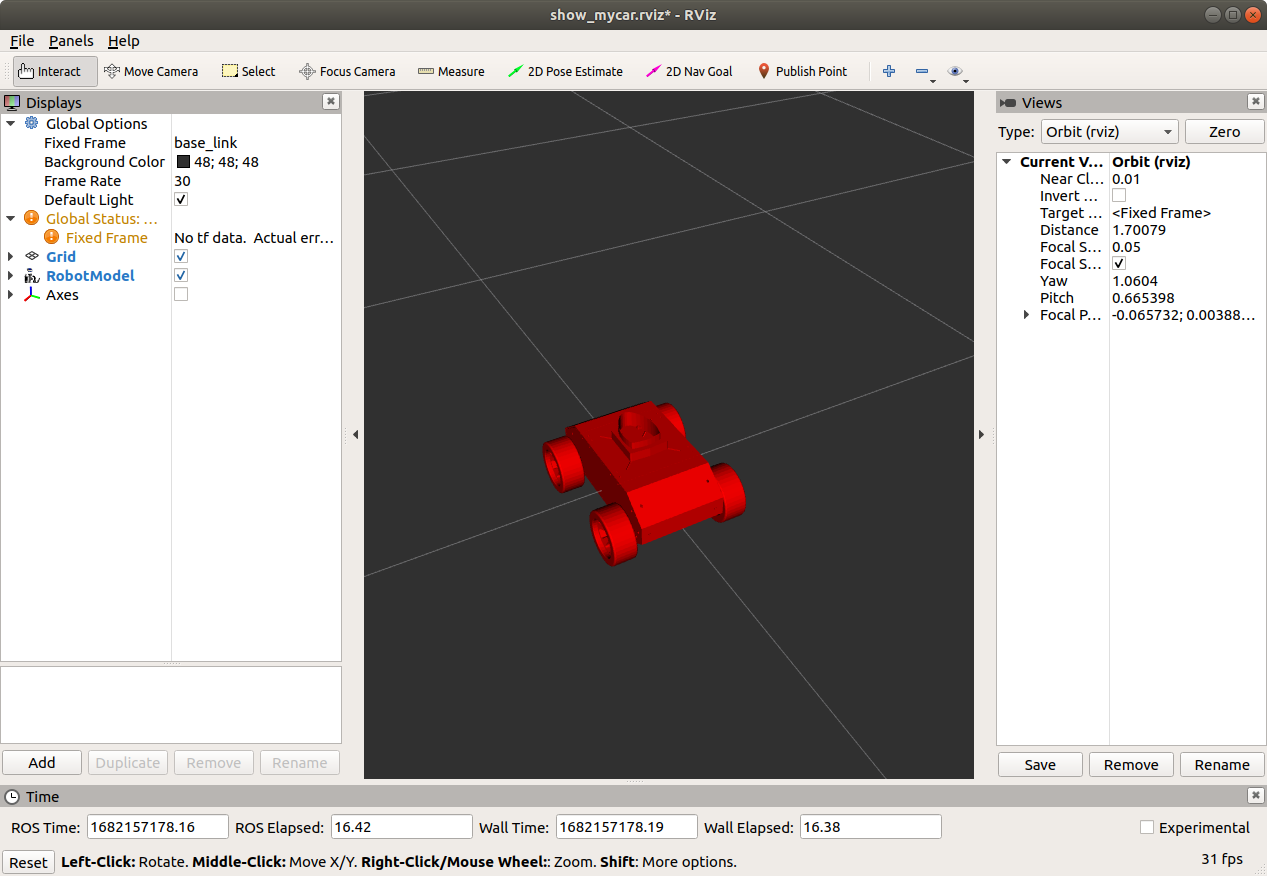
https://download.csdn.net/download/qq_45685327/87716209