偏好强化学习概述

文章目录
-
- 为什么需要了解偏好强化学习
- 什么是偏好强化学习
-
- 基于偏好的马尔科夫决策过程(Markov decision processes with preferences,MDPP)
- 反馈类型分类
- 学习算法分类
- 近期工作
-
- Deep Reinforcement Learning from Human Preference(2023)
- Preference Transformer: Modeling Human Preferences using Transformers for RL(2023)
- 更多相关文章
为什么需要了解偏好强化学习
为什么需要了解偏好强化学习?目前强化学习主流的方法都是基于奖励的,强化学习优化目标是长期的累计奖励。而如何设计一个好的奖励函数通常需要大量专家领域知识。并且需要考虑提出的奖励函数是否会影响学习过程,比如学习速度等等问题。在有些场景也并不是能够很好地去定义出这样一个奖励。
对于实际业务问题,业务本身比较复杂,传统解决方法(比如行为树)如果不好,那也不能基于数据去做一些offline RL。并且如果不好给定奖励函数的话,通常会采用模仿学习的方法。但是也存在一些场景人类专家也不能给出一些确切的行为,因此也不能去做一些模仿学习,比如在机器人领域控制电机的电流进而控制机械臂,人类专家无法直接给出电流的参考示例。直接人类给出动作的代价相比于给出偏好的代价是更高的。还有一些场景动作空间巨大,比如电网调度领域,动作空间高达几万个等等的一些传统解决方案很棘手的场景中,可以考虑去采用偏好强化学习来作为一种初始化网络参数,或者微调修复性能的方法。
随着生产物质的丰富,用户对于个性化追求将愈发强烈。如何将用户的个性化偏好进行量化,进而更好地服务用户(比如用GPT作为智能家居中控,给用户提供个性化的全家智能)。比如在游戏AI领域,如何基于用户反馈,设计出拟人性的智能体,或者是符合玩家兴趣爱好的智能体,或者依据玩家偏好变化而变化的NPC都是未来的发展趋势。
什么是偏好强化学习
想要去解决一个问题,首先需要去寻找的就是优化目标。在强化学习里面的优化目标就是奖励函数,因此想要待解决的问题用强化学习方法来求解,就需要将优化目标与奖励函数挂钩。而基于专家经验设计的奖励函数通常会面临四个问题:1. Reward Hacking: 只管最大化奖励分数,不考虑实际情况。2. Reward Shaping: 平衡goal definition和guidance task。3. Infinite Rewards: 存在一些case,是坚决不允许发生的。虽然现在有mask可以去做,但是也有一些问题其实是没有办法用mask去做的,只有做了之后才能验证是否违反了硬约束条件。4. Multi-objective Trade-off: 如果需要考虑多个优化目标
当然也有一些方法在设计一些内在的奖励,来处理这样一个问题。然而设计一个好的内在奖励其实也是很困难的。
偏好强化学习(Preference-Based Reinforcement Learning, PbRL)直接基于专家的反馈进行学习,并不需要设计奖励函数,并且对于人类对于专业领域的需求也比较少,因为给一个确切的数值奖励给智能体,而是一个比较值。PbRL的关键在于说把强化学习里面,对于奖励,从一个数值的反馈信号变成了一个偏好的反馈信号。想要构建偏好强化学习的优化过程,我们还需要去定义一些符号,和我们能够拿到的数据集合:
- z i ≻ z j z_{i} \\succ z_{j} zi≻zj: 数据 z i z_{i} zi是strictly preferred。
- z i ∼ z j z_{i} \\sim z_{j} zi∼zj: 数据偏好是无法区分的 indifferent。
- z i ⪰ z j z_{i} \\succeq z_{j} zi⪰zj: 数据 z i z_{i} zi是weakly preferred。
基于偏好的马尔科夫决策过程(Markov decision processes with preferences,MDPP)
一个MDPP可以定义成 ( S , A , μ , δ , γ , ρ ) (S, A, \\mu, \\delta, \\gamma, \\rho) (S,A,μ,δ,γ,ρ):
- S S S 状态空间
- A A A 动作空间
- μ ( s ) \\mu(s) μ(s) 初始状态分布
- δ \\delta δ 状态转移模型 δ ( s ′ ∣ s , a ) \\delta(s^{\\prime} | s, a) δ(s′∣s,a)
- γ \\gamma γ 折扣因子
一条采样的轨迹(trajectory)可以表示为:
τ = { s 0 , a 0 , s 1 , a 1 , … , s n − 1 , a n − 1 , s n } \\boldsymbol{\\tau}=\\{s_0,a_0,s_1,a_1,\\ldots,s_{n-1},a_{n-1},s_n\\} τ={s0,a0,s1,a1,…,sn−1,an−1,sn}
ρ ( τ i ≻ τ j ) \\rho(\\tau_{i} \\succ \\tau_{j}) ρ(τi≻τj)定义为给定轨迹 ( τ i , τ j ) (\\tau_{i}, \\tau_{j}) (τi,τj)下, τ i ≻ τ j \\tau_{i} \\succ \\tau_{j} τi≻τj的概率。智能体可以接收到一个偏好集合:
ζ = { ζ i } = { τ i 1 ≻ τ i 2 } i = 1... N \\zeta=\\{\\zeta_i\\}=\\{\\tau_{i1}\\succ\\tau_{i2}\\}_{i=1...N} ζ={ζi}={τi1≻τi2}i=1...N
并且假设偏好是严格偏好,也就是有:
ρ ( τ i ≻ τ j ) = 1 − ρ ( τ j ≻ τ i ) \\rho(\\boldsymbol\\tau_i \\succ \\boldsymbol\\tau_j) = 1 - \\rho(\\boldsymbol{\\tau}_j \\succ \\boldsymbol{\\tau}_{i}) ρ(τi≻τj)=1−ρ(τj≻τi)
注意:这里并没有假设一个奖励的数值信号 r ( s , a ) r(s, a) r(s,a)。
如何基于人类反馈的偏好来优化策略呢?
基于人类反馈的优化框架如下图所示:
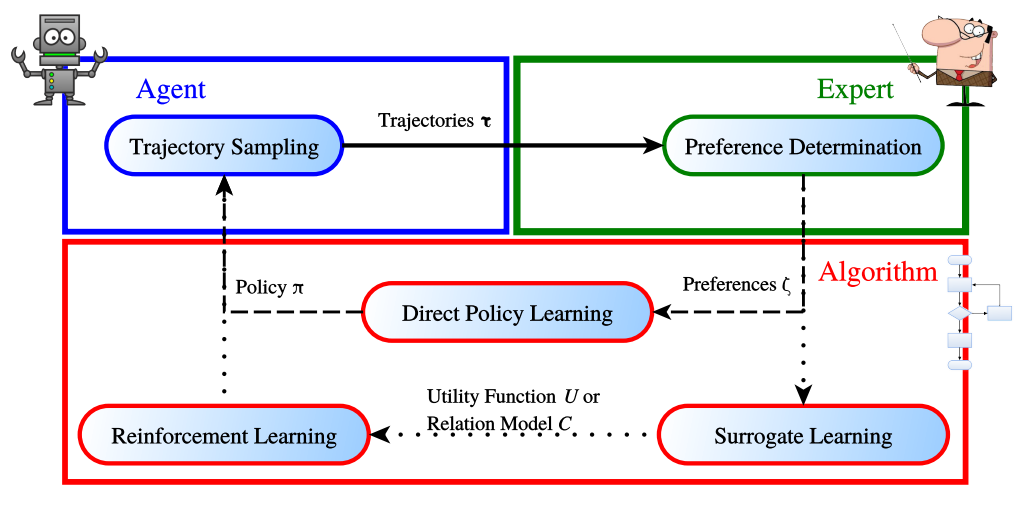
对于一个智能体来说,一个通用的目标是,在一个给定的集合 ζ \\zeta ζ中去寻找到一个策略 π ∗ \\pi^{*} π∗,能够最大化人类偏好。 τ 1 ≻ τ 2 ∈ ζ \\tau_{1} \\succ \\tau_{2} \\in \\zeta τ1≻τ2∈ζ需要满足的条件是:
τ 1 ≻ τ 2 ⇔ Pr π ( τ 1 ) > Pr π ( τ 2 ) \\boldsymbol{\\tau_1}\\succ \\boldsymbol{\\tau_2}\\Leftrightarrow\\operatorname*{Pr}_\\pi(\\boldsymbol{\\tau}_1)>\\operatorname{Pr}_\\pi({\\boldsymbol\\tau}_2) τ1≻τ2⇔πPr(τ1)>Prπ(τ2)
其中
Pr π ( τ ) = μ ( s 0 ) ∏ t = 0 ∣ τ ∣ π ( a t ∣ s t ) δ ( s t + 1 ∣ s t , a t ) \\Pr_{\\pi}(\\boldsymbol{\\tau})=\\mu(s_0)\\prod\\limits_{t=0}^{|\\boldsymbol{\\tau}|}\\pi(a_t\\mid s_t)\\delta(s_{t+1}\\mid s_t,a_t) πPr(τ)=μ(s0)t=0∏∣τ∣π(at∣st)δ(st+1∣st,at)
基于轨迹(trajectory)的最大化偏好问题可以描述为:
τ 1 ≻ τ 2 ⇔ π ∗ = arg max π ( Pr π ( τ 1 ) − Pr π ( τ 2 ) ) \\pmb\\tau_1\\succ\\pmb\\tau_2\\Leftrightarrow\\pi^*=\\arg\\max\\limits_{\\pi}\\left(\\Pr_\\pi(\\pmb\\tau_1)-\\Pr_\\pi(\\pmb\\tau_2)\\right) τ1≻τ2⇔π∗=argπmax(πPr(τ1)−πPr(τ2))
到此,我们就可以定义出一个最小化偏好损失函数:
L ( π , τ 1 ≻ τ 2 ) = − ( Pr π ( τ 1 ) − Pr π ( τ 2 ) ) L(\\pi,\\boldsymbol{\\tau_1} \\succ \\boldsymbol{\\tau_2}) = - \\left(\\Pr_\\pi(\\boldsymbol{\\tau}_1) -\\Pr_\\pi({\\boldsymbol\\tau_2})\\right) L(π,τ1≻τ2)=−(πPr(τ1)−πPr(τ2))
在有多个偏好相互比较的关系下,损失函数可以表示为:
L ( π , ζ ) = ( L ( π , ζ 0 ) , L ( π , ζ 1 ) , … , L ( π , ζ n ) ) \\boldsymbol{L}(\\pi,\\zeta)=(L(\\pi,\\zeta_{0}),L(\\pi,\\zeta_1),\\dots,L(\\pi,\\zeta{_n})) L(π,ζ)=(L(π,ζ0),L(π,ζ1),…,L(π,ζn))
表示为权重加和的方式则为:
L ( π , ζ ) = ∑ i = 1 N α i L ( π , ζ i ) \\mathcal{L}(\\pi,\\zeta)=\\sum_{i=1}^N\\alpha_i L(\\pi,\\zeta_i) L(π,ζ)=i=1∑NαiL(π,ζi)
反馈类型分类
- 动作偏好(action preference): 对于给定的相同状态,比较两个动作。这种方法无法处理短期偏好与长期偏好的关系。
- 状态偏好(state preference): s i 1 ≻ s i 2 s_{i1} \\succ s_{i2} si1≻si2表示相比于状态 s i 2 s_{i2} si2,人类更偏好状态 s i 1 s_{i1} si1。
- 轨迹偏好(trajectory preference): τ i 1 ≻ τ i 2 \\tau_{i1} \\succ \\tau_{i2} τi1≻τi2表示轨迹 τ i 1 \\tau_{i1} τi1优于轨迹 τ i 2 \\tau_{i2} τi2。轨迹偏好里一个重要问题就是信用分配问题(temporal credit assignment problem)。
学习算法分类
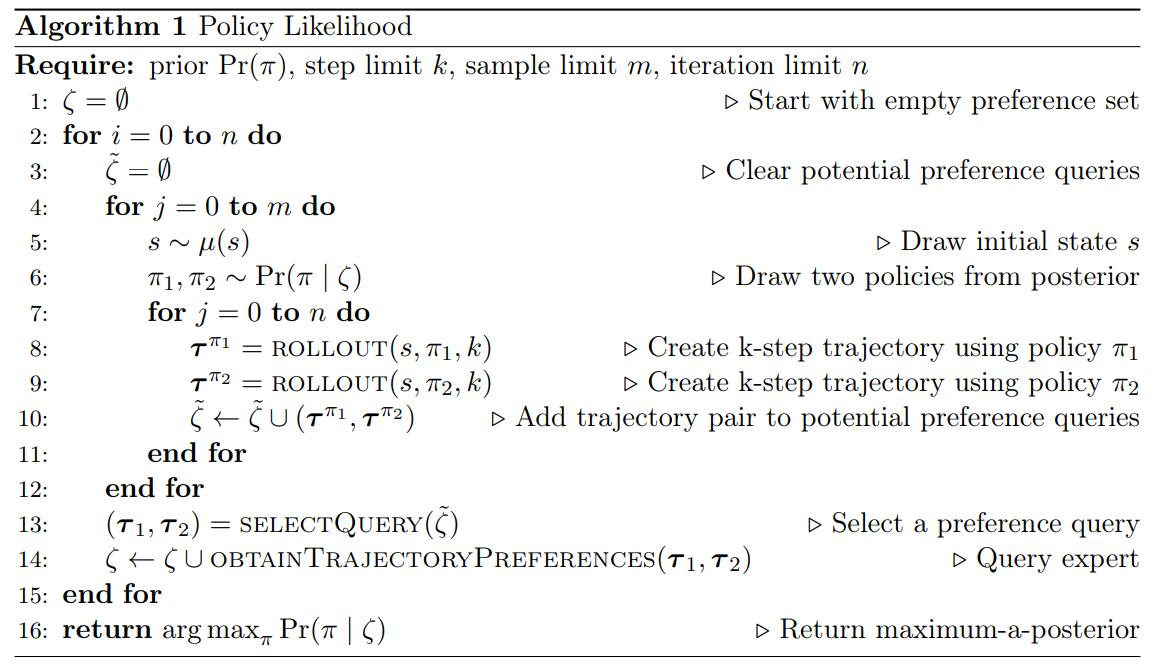
近似策略分布(Approximating the Policy Distribution)
对于给定的trajectory ζ \\zeta ζ,基于参数化的策略分布 Pr ( π ∣ ζ ) \\Pr(\\pi | \\zeta) Pr(π∣ζ)产生不同的策略 π 1 , π 2 \\pi_{1}, \\pi_{2} π1,π2,再基于产生的不同的策略来产生不同的trajector τ 1 , τ 2 \\tau_{1}, \\tau_{2} τ1,τ2, 再给定人类评判偏好,存储偏好轨迹。最后产生能够最大化轨迹偏好的策略 a r g m a x π P r ( π ∣ ζ ) argmax_{\\pi}Pr(\\pi | \\zeta) argmaxπPr(π∣ζ)。
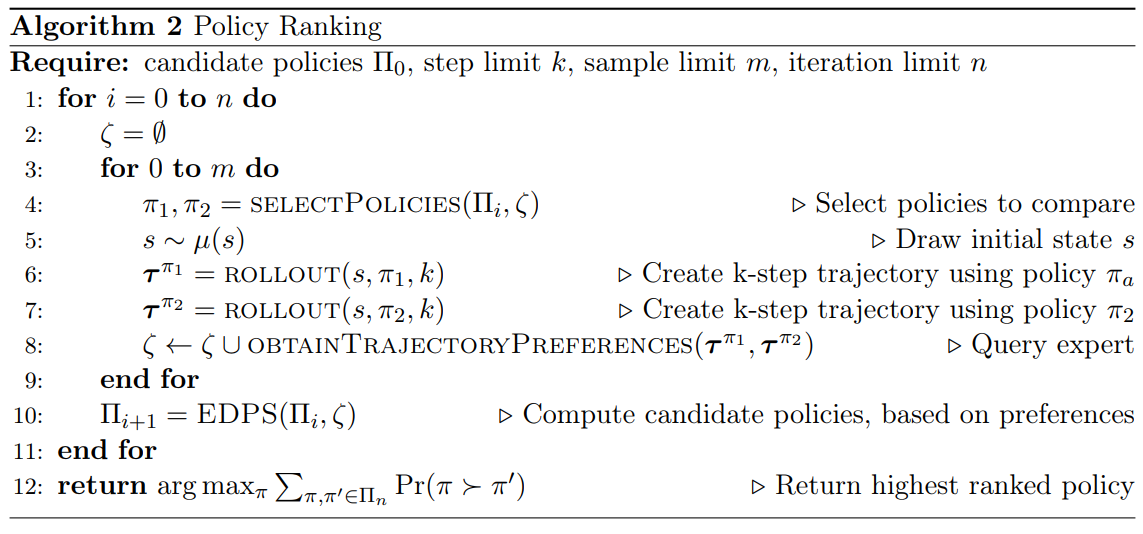
比较和排序策略(Comparing and Ranking Policies)
给定策略集合,在策略集合中直接进行偏好排序,选取获取偏好排序最大的策略作为最终策略进行输出:
学习偏好模型(Learning a Preference Model)
直接学一个偏好模型: C ( a ≻ a ′ ∣ s ) C(a \\succ a^{\\prime} | s) C(a≻a′∣s),策略为贪婪策略。类似DQN,在这里是直接计算偏好函数,然后基于偏好函数来直接求解策略。

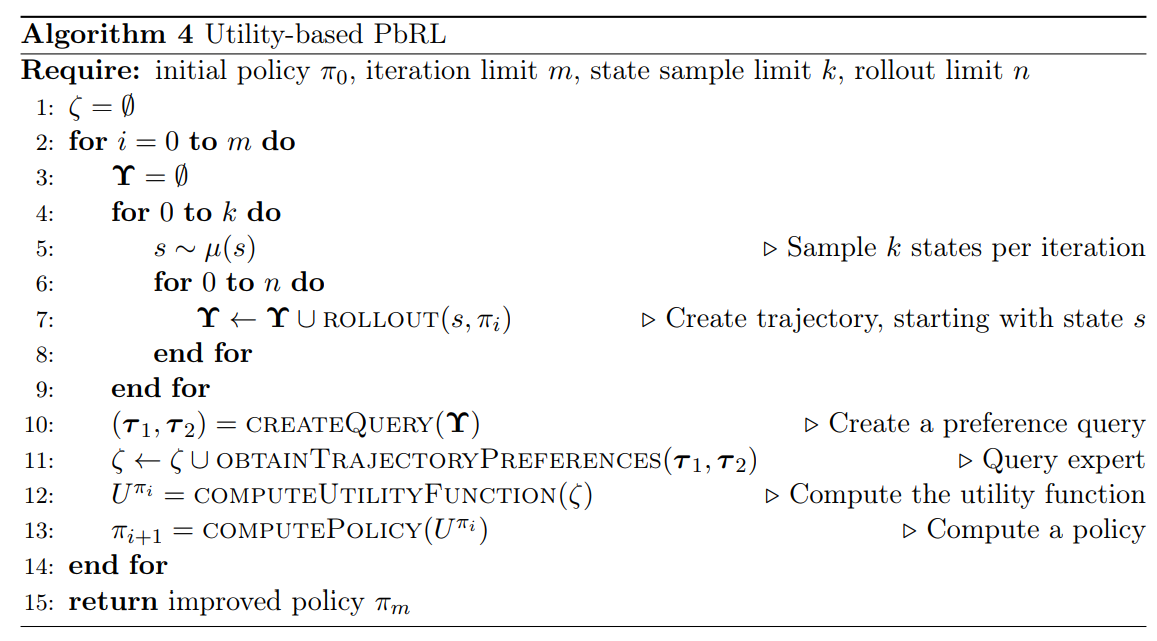
学习奖励函数(Learning a Utility Function)
基于偏好计算一个奖励函数 U ( τ ) U(\\tau) U(τ),在许多场景中可以拆分为 U ( s , a ) U(s, a) U(s,a)。策略求解即为最大化奖励的过程。 这也是目前主流的求解方案:
总结这四类方法就是:1. 构建一个产生策略的函数 θ \\theta θ,一最大化偏好轨迹来优化 θ \\theta θ。2. 给定一个策略集合,基于偏好,直接在策略集合中选取能够产生人类偏好最大的策略。3. 学习一个偏好模型 C ( a ≻ a ′ ∣ s ) C(a \\succ a^{\\prime} | s) C(a≻a′∣s), 基于这个偏好模型直接贪婪产生策略。4. 学习奖励函数,策略基于奖励函数进行优化。
近期工作
Deep Reinforcement Learning from Human Preference(2023)
- Deep Reinforcement Learning from Human Preference
这篇文章主要贡献是用于比较困难的游戏场景中:

奖励预测器损失函数可以表示为:
P ^ [ σ 1 ≻ σ 2 ] = exp ∑ r ^ ( a t 1 , a t 1 ) exp ∑ r ^ ( o t 1 , a t 1 ) + exp ∑ r ^ ( o t 2 , a t 2 ) \\hat{P}\\bigl[\\sigma^1\\succ\\sigma^2\\bigr]=\\frac{\\exp\\sum\\hat{r}\\bigl(a_t^1,a_t^1\\bigr)}{\\exp\\sum\\hat{r}(o^1_t,a_t^1)+\\exp\\sum{\\hat{r}(o_t^2,a_t^2)}} P^[σ1≻σ2]=exp∑r^(ot1,at1)+exp∑r^(ot2,at2)exp∑r^(at1,at1)
log ( r ^ ) = − ∑ ( σ 1 , σ 2 , μ ) ∈ D μ ( 1 ) log P ^ [ σ 1 ≻ σ 2 ] + μ ( 2 ) log P ^ [ σ 2 ≻ σ 1 ] \\log(\\hat r)=-\\sum_{(\\sigma^1,\\sigma^2,\\mu)\\in\\mathcal D}\\mu(1)\\log\\hat P\\big[\\sigma^1\\succ\\sigma^2\\big]+\\mu(2)\\log\\hat P\\bigl[\\sigma^2\\succ\\sigma^1\\bigr] log(r^)=−(σ1,σ2,μ)∈D∑μ(1)logP^[σ1≻σ2]+μ(2)logP^[σ2≻σ1]
人类偏好的不稳定性,会导致奖励预测器的偏差和方差都受到一定的影响。
实验结果:
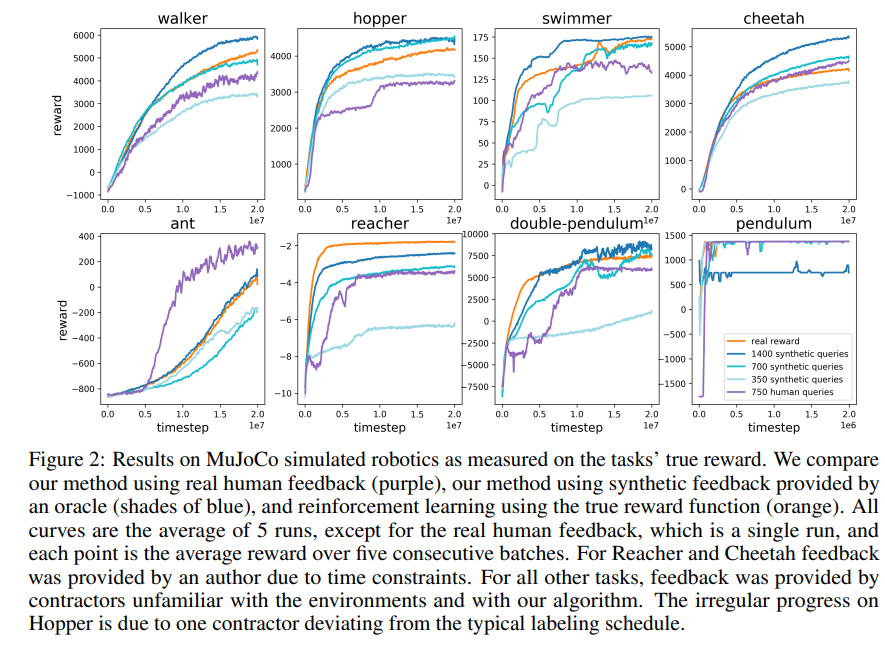
Preference Transformer: Modeling Human Preferences using Transformers for RL(2023)
- Preference Transformer: Modeling Human Preferences using Transformers for RL
这篇文章主要用于解决非马尔科夫性
整体框架图:
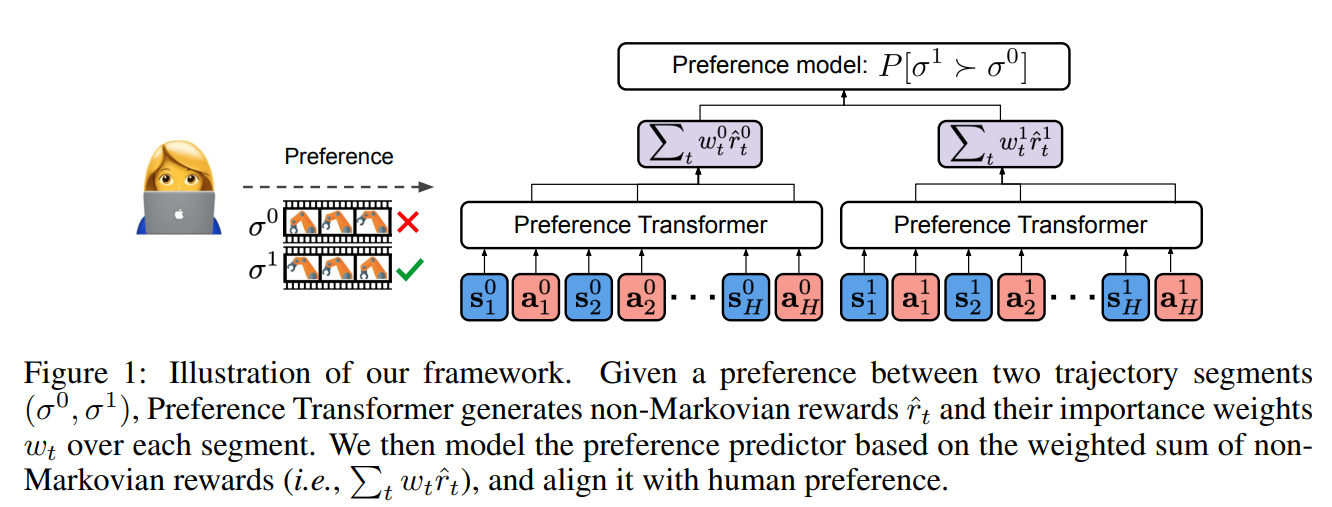
Preference Transformer局部:
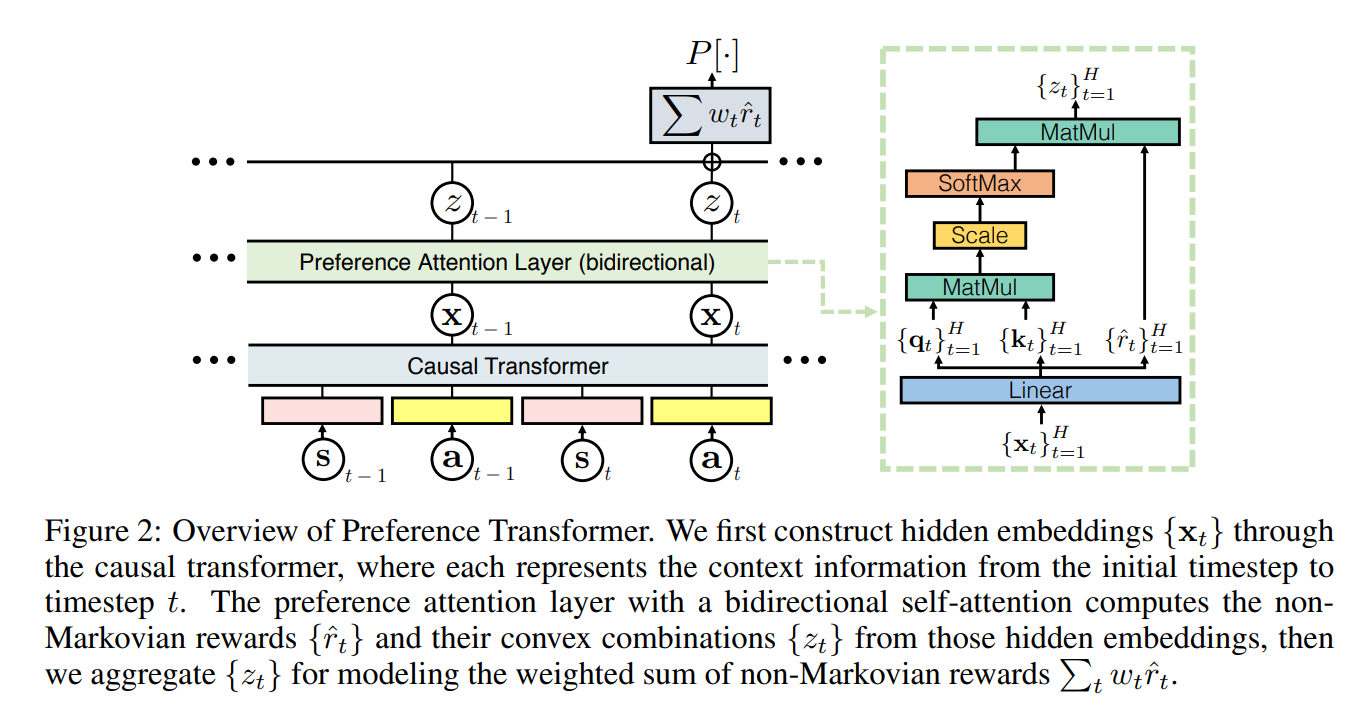
注意奖励在Linear层就已经进行了预测,后续输出是对trajectory奖励的加权。
在实验部分,作者设计了一系列的评估指标,用于确定Preference Transformer确实是学到了中间的关键步骤奖励,也就是确实进行了置信分配。
更多相关文章
- Tencent AI Lab:DEPLOYING OFFLINE REINFORCEMENT LEARNING WITH HUMAN FEEDBACK(2023)
- UC Berkeley:Principled Reinforcement Learning with Human Feedback from Pairwise or K-wise Comparisons(2023)
- OpenAI: Deep reinforcement learning from human preferences (2023)
- UC Berkeley:Preference Transformer: Modeling Human Preferences using Transformers for RL(2023)
- DeepMind: Improving Multimodal Interactive Agents with Reinforcement Learning from Human Feedback(2022)
- Humans are not Boltzmann Distributions: Challenges and Opportunities for Modelling Human Feedback and Interaction in Reinforcement Learning(2022)
- Google:Offline Reinforcement Learning from Human Feedback in Real-World Sequence-to-Sequence Tasks(2021)
- Explore, Exploit or Listen: Combining Human Feedback and Policy Model to Speed up Deep Reinforcement Learning in 3D Worlds (2021)
- Human feedback in continuous actor-critic reinforcement learning(2019)
- Stanford: Deep Reinforcement Learning from Policy-Dependent Human Feedback (2019)
- A Survey of Preference-Based Reinforcement Learning Methods (2017)
- Nature: Reinforcement learning improves behaviour from evaluative feedback(2015)
- Augmenting Reinforcement Learning with Human Feedback(2011)