二维(三维)坐标系中旋转矩阵

求三维坐标系的旋转矩阵通常需要求分别沿3个坐标轴的二维坐标系下的旋转矩阵,二维坐标系下的旋转矩阵的推导过程通常以某一点逆时针旋转θ\\thetaθ角度进行推理。以下将通过此例来详细讲解二维坐标系下的旋转矩阵推导过程,并进一步给出其他方式的旋转矩阵。
一、二维坐标中点的旋转变换
点的旋转矩阵(逆时针旋转)
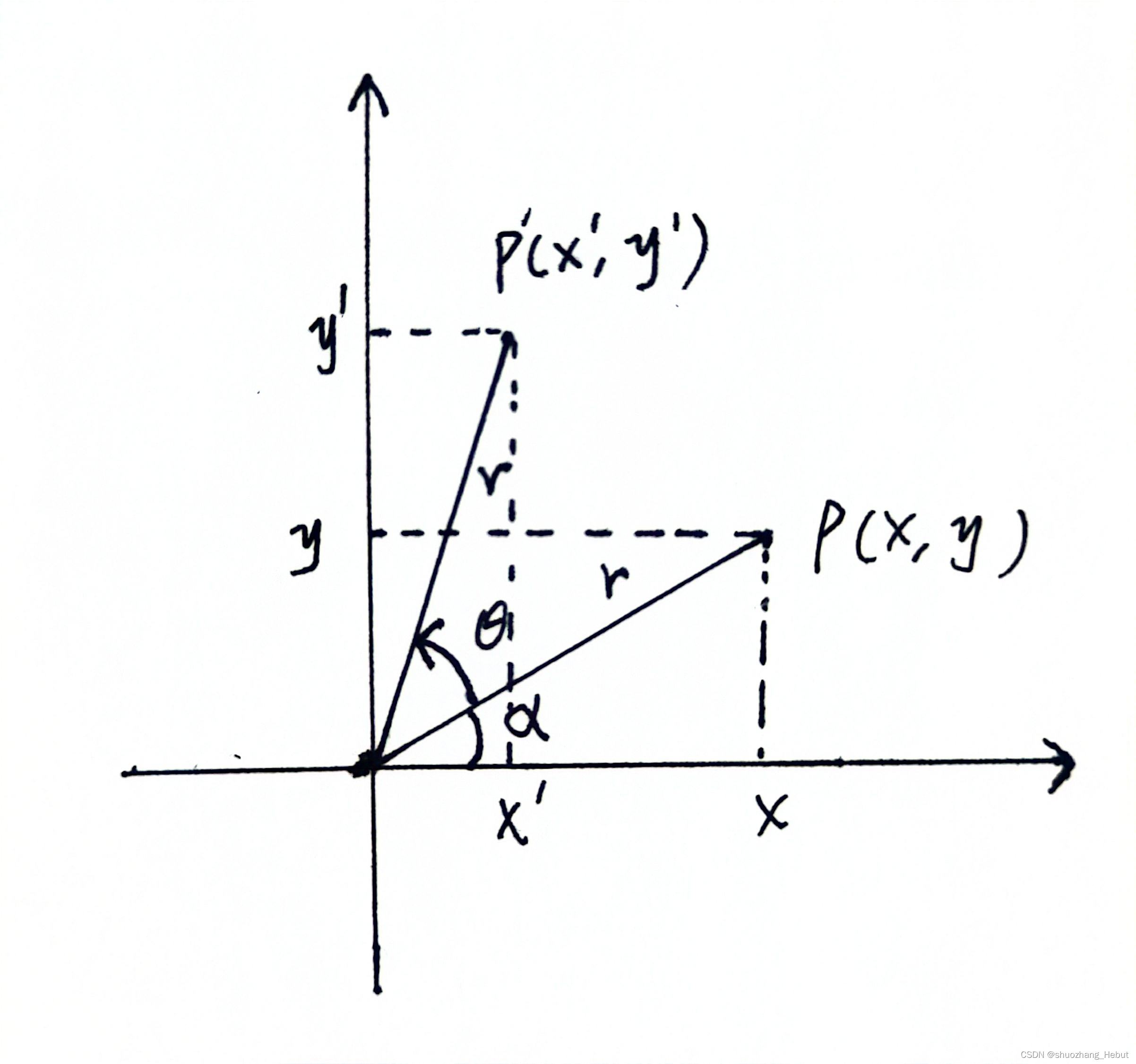
已知点P(x,y)P(x, y)P(x,y),将该点以逆时针方向旋转θ\\thetaθ角度后得到点P′(x′,y′)P^{\\prime}(x^{\\prime}, y^{\\prime})P′(x′,y′),如下图所示。求由点PPP到点P′P^{\\prime}P′的旋转矩阵。
-
设半径为rrr,由图可以分别得到以下三角公式:
- 对于点P(x,y)P(x, y)P(x,y)
x=rcosαy=rsinα(1)\\begin{aligned} & x=r \\cos \\alpha \\\\ & y=r \\sin \\alpha \\end{aligned} \\tag{1}x=rcosαy=rsinα(1) - 对于点P′(x′,y′)P^{\\prime}(x^{\\prime}, y^{\\prime})P′(x′,y′)
x′=rcos(α+θ)y′=rsin(α+θ)(2)\\begin{aligned} & x^{\\prime}=r \\cos (\\alpha+\\theta) \\\\ & y^{\\prime}=r \\sin (\\alpha+\\theta) \\end{aligned} \\tag{2}x′=rcos(α+θ)y′=rsin(α+θ)(2)
- 对于点P(x,y)P(x, y)P(x,y)
-
根据两角和的正弦与余弦公式:
sin(α+θ)=sinαcosθ+cosαsinθcos(α+θ)=cosαcosθ−sinαsinθ(3)\\begin{aligned} & \\sin (\\alpha+\\theta)=\\sin \\alpha \\cos \\theta+\\cos \\alpha \\sin \\theta \\\\ & \\cos (\\alpha+\\theta)=\\cos \\alpha \\cos \\theta-\\sin \\alpha \\sin \\theta \\end{aligned} \\tag{3} sin(α+θ)=sinαcosθ+cosαsinθcos(α+θ)=cosαcosθ−sinαsinθ(3) -
将公式(3)代入公式(2),可得到:
x′=rcosαcosθ−rsinαsinθy′=rsinαcosθ+rcosαsinθ(4)\\begin{aligned} & x^{\\prime} =r \\cos \\alpha \\cos \\theta-r \\sin \\alpha \\sin \\theta \\\\ & y^{\\prime} =r \\sin \\alpha \\cos \\theta+r \\cos \\alpha \\sin \\theta \\\\ \\end{aligned} \\tag{4} x′=rcosαcosθ−rsinαsinθy′=rsinαcosθ+rcosαsinθ(4) -
将公式(1)代入公式(4),化简掉α\\alphaα,可得到(x′,y′)(x^{\\prime}, y^{\\prime})(x′,y′)与(x,y)(x, y)(x,y)的关系,即:
x′=xcosθ−ysinθy′=ycosθ+xsinθ(5)\\begin{aligned} & x^{\\prime} =x \\cos \\theta-y \\sin \\theta \\\\ & y^{\\prime} =y \\cos \\theta+x \\sin \\theta \\\\ \\end{aligned} \\tag{5} x′=xcosθ−ysinθy′=ycosθ+xsinθ(5) -
整理公式(5)可得到旋转矩阵公式:
x′=cosθ⋅x−sinθ⋅yy′=sinθ⋅x+cosθ⋅y⇒[x′y′]=[cosθ−sinθsinθcosθ][xy](6)\\begin{aligned} x^{\\prime}&=\\cos \\theta \\cdot x-\\sin \\theta \\cdot y \\\\ y^{\\prime}&=\\sin \\theta \\cdot x+\\cos \\theta \\cdot y \\\\ \\Rightarrow \\left[\\begin{array}{l} x^{\\prime} \\\\ y^{\\prime}\\end{array}\\right] &=\\left[\\begin{array}{cc}\\cos \\theta & -\\sin \\theta \\\\ \\sin \\theta & \\cos \\theta \\end{array}\\right] \\left[\\begin{array}{l} x \\\\ y \\end{array}\\right] \\end{aligned} \\tag{6} x′y′⇒[x′y′]=cosθ⋅x−sinθ⋅y=sinθ⋅x+cosθ⋅y=[cosθsinθ−sinθcosθ][xy](6) -
因此二维坐标系下逆时针旋转矩阵RRR为:
R=[cosθ−sinθsinθcosθ]R = \\left[\\begin{array}{cc}\\cos \\theta & -\\sin \\theta \\\\ \\sin \\theta & \\cos \\theta \\end{array}\\right] R=[cosθsinθ−sinθcosθ]
点的旋转矩阵(顺时针旋转)
已知点P′(x′,y′)P^{\\prime}(x^{\\prime}, y^{\\prime})P′(x′,y′),将该点以顺时针方向旋转θ\\thetaθ角度后得到点P(x,y)P(x, y)P(x,y),求PPP。
1、利用求逆矩阵的方式
- 二阶矩阵的逆的求法为:主对角元素换位置,次对角元素变符号,再乘上系数1/(ad-bc),由于旋转矩阵RRR的ad-bc=1,因此RRR的逆矩阵R′R^{\\prime}R′为:
R′=[cosθsinθ−sinθcosθ]R^{\\prime} = \\left[\\begin{array}{cc}\\cos \\theta & \\sin \\theta \\\\ -\\sin \\theta & \\cos \\theta \\end{array}\\right] R′=[cosθ−sinθsinθcosθ] - 因此旋转公式为:
[xy]=[cosθsinθ−sinθcosθ][x′y′]\\left[\\begin{array}{l} x \\\\ y \\end{array}\\right] = \\left[\\begin{array}{cc}\\cos \\theta & \\sin \\theta \\\\ -\\sin \\theta & \\cos \\theta \\end{array}\\right] \\left[\\begin{array}{l} x^{\\prime} \\\\ y^{\\prime}\\end{array}\\right] [xy]=[cosθ−sinθsinθcosθ][x′y′]
2、利用几何知识推导
将P′P^{\\prime}P′顺时针旋转θ\\thetaθ角度到PPP,相当于逆时针旋转(2π−θ)(2 \\pi-\\theta)(2π−θ),由于三角函数的周期为2π2 \\pi2π,因此相当于旋转−θ-\\theta−θ角度。
- 将−θ-\\theta−θ代入到公式(6),得到:
x=cos(−θ)⋅x′−sin(−θ)⋅y′=cosθ⋅x′+sinθ⋅y′y=sin(−θ)⋅x′+cos(−θ)⋅y′=−sinθ⋅x′+cosθ⋅y′\\begin{aligned} x & =\\cos (-\\theta) \\cdot x^{\\prime}-\\sin (-\\theta) \\cdot y^{\\prime} \\\\ & =\\cos \\theta \\cdot x^{\\prime}+\\sin \\theta \\cdot y^{\\prime} \\\\ y & =\\sin (-\\theta) \\cdot x^{\\prime}+\\cos (-\\theta) \\cdot y^{\\prime} \\\\ & =-\\sin \\theta \\cdot x^{\\prime}+\\cos \\theta \\cdot y^{\\prime} \\end{aligned} xy=cos(−θ)⋅x′−sin(−θ)⋅y′=cosθ⋅x′+sinθ⋅y′=sin(−θ)⋅x′+cos(−θ)⋅y′=−sinθ⋅x′+cosθ⋅y′ - 整理上述公式可得到顺时针时的旋转矩阵公式:
x=cosθ⋅x′+sinθ⋅y′y=−sinθ⋅x′+cosθ⋅y′⇒[xy]=[cosθsinθ−sinθcosθ][x′y′]\\begin{aligned} x&=\\cos \\theta \\cdot x^{\\prime}+\\sin \\theta \\cdot y^{\\prime} \\\\ y&=-\\sin \\theta \\cdot x^{\\prime}+\\cos \\theta \\cdot y^{\\prime} \\\\ \\Rightarrow \\left[\\begin{array}{l} x \\\\ y \\end{array}\\right] &= \\left[\\begin{array}{cc}\\cos \\theta & \\sin \\theta \\\\ -\\sin \\theta & \\cos \\theta \\end{array}\\right] \\left[\\begin{array}{l} x^{\\prime} \\\\ y^{\\prime}\\end{array}\\right] \\end{aligned} xy⇒[xy]=cosθ⋅x′+sinθ⋅y′=−sinθ⋅x′+cosθ⋅y′=[cosθ−sinθsinθcosθ][x′y′]
二、二维坐标系的旋转变换
二维坐标系XOY\\text{XOY}XOY中有一点P(x,y)P(x, y)P(x,y),将坐标系XOY\\text{XOY}XOY逆时针旋转θ\\thetaθ角度后得到新坐标系X′O′Y′\\text{X}^{\\prime}\\text{O}^{\\prime}\\text{Y}^{\\prime}X′O′Y′,求点PPP在新坐标系下的坐标P′(x′,y′)P^{\\prime}(x^{\\prime}, y^{\\prime})P′(x′,y′),这个过程称为坐标系变换。
新坐标的求法可以转换为逆向旋转坐标点的方式,并利用点的旋转变换求得。因此,坐标系顺时针旋转θ\\thetaθ角度,相当于原坐标系中某一点逆时针旋转θ\\thetaθ角度,反之亦然。
总结
- 某点逆时针旋转θ\\thetaθ角度(坐标系顺时针旋转θ\\thetaθ角度)的旋转矩阵为:
R=[cosθ−sinθsinθcosθ]R = \\left[\\begin{array}{cc}\\cos \\theta & -\\sin \\theta \\\\ \\sin \\theta & \\cos \\theta \\end{array}\\right] R=[cosθsinθ−sinθcosθ] - 某点顺时针旋转θ\\thetaθ角度(坐标系逆时针旋转θ\\thetaθ角度)的旋转矩阵为:
R′=[cosθsinθ−sinθcosθ]R^{\\prime} = \\left[\\begin{array}{cc}\\cos \\theta & \\sin \\theta \\\\ -\\sin \\theta & \\cos \\theta \\end{array}\\right] R′=[cosθ−sinθsinθcosθ]
三维坐标变换可进一步参考Link3。
参考:
Link1
Link2
Link3