简单的单目测距实验

一、原理
简单的单目测距方法,假设相机平面和物体平面平行,相机正对着物体表面拍摄,则可以利用相似三角形法。
用相似三角形计算物体或者目标到相机的距离,将使用相似三角形来计算相机到一个已知的物体或者目标的距离。
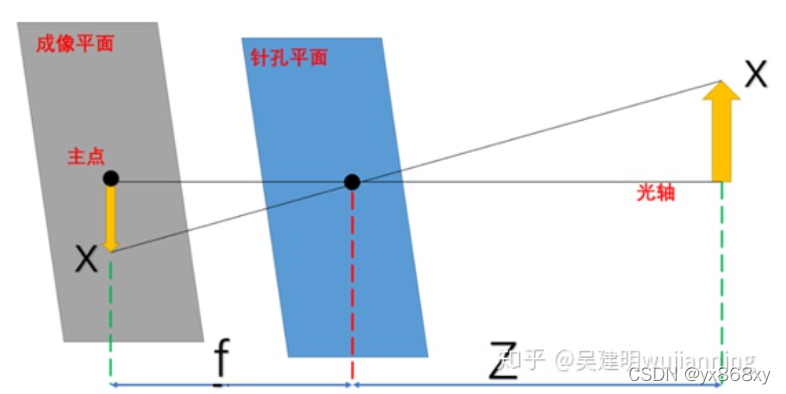
假设有一个宽度/高度为 W 的目标或者物体。然后将这个目标放在距离的相机为 D 的位置。用相机对物体进行拍照并且测量物体的像素宽度/高度 P。
这样就得出了相机焦距的公式:
F = (P x D) / W
当继续将的相机移动靠近或者离远物体或者目标时,可以用相似三角形来计算出物体离相机的距离:
D’ = (W x F) / P。
二、实验过程
以下操作均有误差:
实验采用的直接是笔记本摄像头,直接拍摄图像测试,忽略了相机标定和相机校正过程,如果想要更加准确的结果还是要操作一下。
拍摄的实际图像目标区域的大小:宽:9cm,高:4.8cm,测试的实际距离为24cm,用的时候单位要换算为英尺。
拍摄的图像如下图所示:

代码:
# -*- coding: utf-8 -*-
import cv2 # 导入Opencv库KNOWN_DISTANCE = 9.45 # 这个距离自己实际测量一下KNOWN_WIDTH = 3.54 # A4纸的宽度KNOWN_HEIGHT = 1.89IMAGE_PATHS = ["0001.jpg", "0002.jpg", "0003.jpg","0004.jpg","0005.jpg","0006.jpg"] # 将用到的图片放到了一个列表中# 定义目标函数def find_marker(image):gray_img = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 将彩色图转化为灰度图gray_img = cv2.GaussianBlur(gray_img, (5, 5), 0) # 高斯平滑去噪edged_img = cv2.Canny(gray_img, 35, 125) # Canny算子阈值化#cv2.imshow("降噪效果图", edged_img) # 显示降噪后的图片# 获取纸张的轮廓数据countours, hierarchy = cv2.findContours(edged_img.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)# print(len(countours))c = max(countours, key=cv2.contourArea) # 获取最大面积对应的点集#rect = cv2.minAreaRect(c) # 最小外接矩形rect = cv2.boundingRect(c) # 最小外接矩形return rect# 定义距离函数def distance_to_camera(knownWidth, focalLength, perWidth):return (knownWidth * focalLength) / perWidthdef true_width(knownWidth, focalLength, perWidth):return (knownWidth * perWidth) / focalLength
# 计算摄像头的焦距(内参)def calculate_focalDistance(img_path):first_image = cv2.imread(img_path) # 这里根据准备的第一张图片,计算焦距# cv2.imshow('first image', first_image)marker = find_marker(first_image) # 获取矩形的中心点坐标,长度,宽度和旋转角度#focalLength = (marker[1][0] * KNOWN_DISTANCE) / KNOWN_WIDTH # 获取摄像头的焦距focalLength = (marker[2] * KNOWN_DISTANCE) / KNOWN_WIDTH # 获取摄像头的焦距
# print(marker[1][0])print('焦距(focalLength) = ', focalLength) # 打印焦距的值return focalLength# 计算摄像头到物体的距离def calculate_Distance(image_path, focalLength_value):image = cv2.imread(image_path)# cv2.imshow("原图", image)marker = find_marker(image) # 获取矩形的中心点坐标,长度,宽度和旋转角度, marke[1][0]代表宽度# distance_inches = true_with(KNOWN_DISTANCE, focalLength_value, marker[1][0])distance_inches = distance_to_camera(KNOWN_WIDTH, focalLength_value, marker[2])# box = cv2.boxPoints(marker)## # print("Box = ", box)## box = np.int0(box)## print("Box = ", box)# cv2.drawContours(image, [box], -1, (0, 255, 0), 2) # 绘制物体轮廓cv2.rectangle(image, (marker[0], marker[1]), (marker[0] + marker[2], marker[1] + marker[3]), (0, 255, 0),2) # greencv2.putText(image, "%.2fcm" % (distance_inches * 2.54), (image.shape[1] - 300, image.shape[0] - 20),cv2.FONT_HERSHEY_SIMPLEX, 2.0, (0, 255, 0), 3)cv2.imshow("result", image)if __name__ == "__main__":img_path = "0001.jpg"focalLength = calculate_focalDistance(img_path)for image_path in IMAGE_PATHS:calculate_Distance(image_path, focalLength)cv2.waitKey(0)cv2.destroyAllWindows()
测试效果:

实验条件比较简陋,这种方式的鲁棒性也比较差,当有角度偏差时测量就不那么准确了