pid 循循优化

Improving the Beginner’s PID – Introduction « Project Blog
 The Beginner’s PID
The Beginner’s PID
Here’s the PID equation as everyone first learns it:
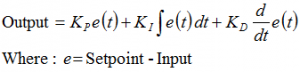
This leads pretty much everyone to write the following PID controller:
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double errSum, lastErr;
double kp, ki, kd;
void Compute()
{/*How long since we last calculated*/unsigned long now = millis();double timeChange = (double)(now - lastTime);/*Compute all the working error variables*/double error = Setpoint - Input;errSum += (error * timeChange);double dErr = (error - lastErr) / timeChange;/*Compute PID Output*/Output = kp * error + ki * errSum + kd * dErr;/*Remember some variables for next time*/lastErr = error;lastTime = now;
}void SetTunings(double Kp, double Ki, double Kd)
{kp = Kp;ki = Ki;kd = Kd;
}Compute() is called either regularly or irregularly, and it works pretty well. This series isn’t about “works pretty well” though. If we’re going to turn this code into something on par with industrial PID controllers, we’ll have to address a few things:
- Sample Time – The PID algorithm functions best if it is evaluated at a regular interval. If the algorithm is aware of this interval, we can also simplify some of the internal math.
- Derivative Kick – Not the biggest deal, but easy to get rid of, so we’re going to do just that.
- On-The-Fly Tuning Changes – A good PID algorithm is one where tuning parameters can be changed without jolting the internal workings.
- Reset Windup Mitigation –We’ll go into what Reset Windup is, and implement a solution with side benefits
- On/Off (Auto/Manual) – In most applications, there is a desire to sometimes turn off the PID controller and adjust the output by hand, without the controller interfering
- Initialization – When the controller first turns on, we want a “bumpless transfer.” That is, we don’t want the output to suddenly jerk to some new value
- Controller Direction – This last one isn’t a change in the name of robustness per se. it’s designed to ensure that the user enters tuning parameters with the correct sign.
- NEW: Proportional on Measurement – Adding this feature makes it easier to control certain types of processes