ROS话题通信自定义+发布订阅代码--03

话题通信自定义msg
在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty… 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如: 激光雷达的信息… std_msgs 由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型
msgs只是简单的文本文件,每行具有字段类型和字段名称,可以使用的字段类型有:
int8, int16, int32, int64 (或者无符号类型: uint*)浮点数:float32, float64string时间:time, duration:持续时间other msg files数组:
variable-length array[]:变长数组,所有这些技巧也能被扩展到三或更多维数组.
fixed-length array[C]:
ROS中还有一种特殊类型:Header,标头包含时间戳(消息被发出去的哪一刻时间值)和ROS中常用的坐标帧信息。会经常看到msg文件的第一行具有Header标头。
需求:创建自定义消息,该消息包含人的信息:姓名、身高、年龄等。
流程:
按照固定格式创建 msg 文件
编辑配置文件
编译生成可以被 Python 或 C++ 调用的中间文件
1.定义msg文件
功能包下新建 msg 目录,添加文件 Person.msg

string name
uint16 age
float64 height
2.编辑配置文件
package.xml中添加编译依赖与执行依赖

<build_depend>message_generation</build_depend><exec_depend>message_runtime</exec_depend>3.CMakeLists.txt编辑 msg 相关配置
编译是依赖

find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generation
)
需要加入 message_generation,必须有 std_msgs
配置 msg 源文件

add_message_files(FILESPerson.msg
)
生成消息时依赖于 std_msgs

generate_messages(DEPENDENCIESstd_msgs
)
执行时依赖
上面的 roscpp rospy std_msgs message_generation功能包要依赖下面的CATKIN_DEPENDS roscpp rospy std_msgs message_runtime功能包,也可以理解成运行时依赖

catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo02_talker_listenerCATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
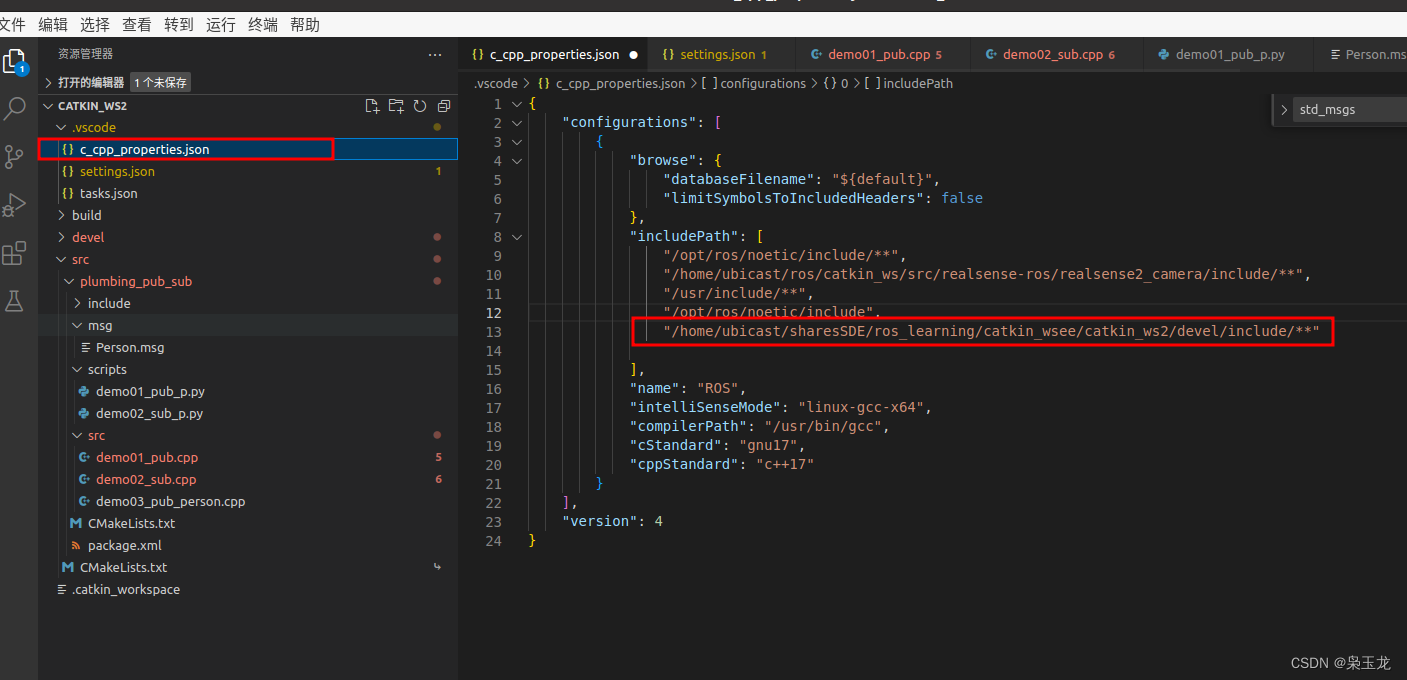
vscode 配置调用中间编译形成的文件
为了方便代码提示以及避免误抛异常,需要先配置 vscode,将前面生成的 head 文件路径配置进 c_cpp_properties.json 的 includepath属性:
发布者
/*需求: 循环发布人的信息*/#include "ros/ros.h"
#include "plumbing_pub_sub/Person.h"//消息类型,这个就调用了编译形成的中间文件,int main(int argc, char *argv[])
{setlocale(LC_ALL,"");//1.初始化 ROS 节点ros::init(argc,argv,"talker_person");//2.创建 ROS 句柄ros::NodeHandle nh;//3.创建发布者对象话题,plumbing_pub_sub::Person:是通过功能包的消息类型来设置的,参数1是话题的名称,参数二为对应的编译后调用的功能.h文件ros::Publisher pub = nh.advertise<plumbing_pub_sub::Person>("chatter_person",1000);//4.组织被发布的消息,编写发布逻辑并发布消息plumbing_pub_sub::Person person;person.name = "sunwukong";person.age = 2000;person.height = 1.45;ros::Rate r(1);//发布频率。逻辑(一秒1次),1HZ while (ros::ok()){pub.publish(person);//数据的发布person.age += 1;ROS_INFO("我叫:%s,今年%d岁,高%.2f米", person.name.c_str(), person.age, person.height);r.sleep();//根据前面制定的发送贫频率自动休眠 休眠时间 = 1/频率;ros::spinOnce();//回头函数,来处理回调函数,但是这个没有回调函数,占时没有用上}return 0;
}配置CMakeLists.txt文件
add_executable(demo03_pub_person src/demo03_pub_person.cpp)

target_link_libraries(demo03_pub_person${catkin_LIBRARIES}
)配置CMakeLists.txt文件

配置CMakeLists.txt文件
用来保证调用的依赖关系,就是编译顺序,要先保证msg下的Person.msg才能编译demo03_pub_person src/demo03_pub_person.cpp文件
add_dependencies(demo03_pub_person ${PROJECT_NAME}_generate_messages_cpp)

订阅者
/*需求: 订阅人的信息*/# 配置CMakeLists.txt文件#include "ros/ros.h"
#include "plumbing_pub_sub/Person.h"void doPerson(const plumbing_pub_sub::Person::ConstPtr话题通信自定义msg
& Person){ROS_INFO("订阅的人信息:%s, %d, %.2f", Person->name.c_str(), Person->age, Person->height);
}int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");//1.初始化 ROS 节点ros::init(argc,argv,"listener_person");//2.创建 ROS 句柄ros::NodeHandle nh;//3.创建订阅对象ros::Subscriber sub = nh.subscribe<plumbing_pub_sub::Person>("chatter_person",10,doPerson);//4.回调函数中处理 person//5.ros::spin();ros::spin();//return 0;
}配置CMakeLists.txt文件
add_executable(demo04_sub_person src/demo04_sub_person.cpp)target_link_libraries(demo04_sub_person${catkin_LIBRARIES}
)
终端命令
发布者
roscore
rosrun plumbing_pub_sub demo03_pub_person
rosrun plumbing_pub_sub demo04_sub_person
构建py代码
#! /usr/bin/env python
"""发布方:循环发送消息"""
import rospy
from plumbing_pub_sub.msg import Personif __name__ == "__main__":#1.初始化 ROS 节点rospy.init_node("talker_person_p")#2.创建发布者对象pub = rospy.Publisher("chatter_person",Person,queue_size=10)#3.组织消息p = Person()p.name = "葫芦瓦"p.age = 18p.height = 0.75#4.编写消息发布逻辑rate = rospy.Rate(1)while not rospy.is_shutdown():pub.publish(p) #发布消息rate.sleep() #休眠rospy.loginfo("姓名:%s, 年龄:%d, 身高:%.2f",p.name, p.age, p.height)订阅者
/*需求: 订阅人的信息*/#include "ros/ros.h"
#include "plumbing_pub_sub/Person.h"void doPerson(const plumbing_pub_sub::Person::ConstPtr& Person){ROS_INFO("订阅的人信息:%s, %d, %.2f", Person->name.c_str(), Person->age, Person->height);
}int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");//1.初始化 ROS 节点ros::init(argc,argv,"listener_person");//2.创建 ROS 句柄ros::NodeHandle nh;//3.创建订阅对象ros::Subscriber sub = nh.subscribe<plumbing_pub_sub::Person>("chatter_person",10,doPerson);//4.回调函数中处理 person//5.ros::spin();ros::spin();//return 0;
}配置CMakeLists.txt文件
scripts/demo03_pub_preson_p.pyscripts/demo04_sub_preson_p.py

使用命令终端
roscore
sudo chmod +x *.py ##在catkin_ws2/src/plumbing_pub_sub/scripts文件中使用命令
rosrun plumbing_pub_sub demo03_pub_preson_p.py
rosrun plumbing_pub_sub demo04_sub_preson_p.py