ROS实践11 自定义头文件并调用

运行环境:
ubuntu20.04 noetic
宏基暗影骑士笔记本
思路:
类和函数:
头文件 声明
可执行文件 定义 和 调用
另外:在CMakeLists.txt 添加头文件路径 include_directories
1.1 编写头文件
1)在功能包下的 include/功能包名 目录下新建头文件 hello.h
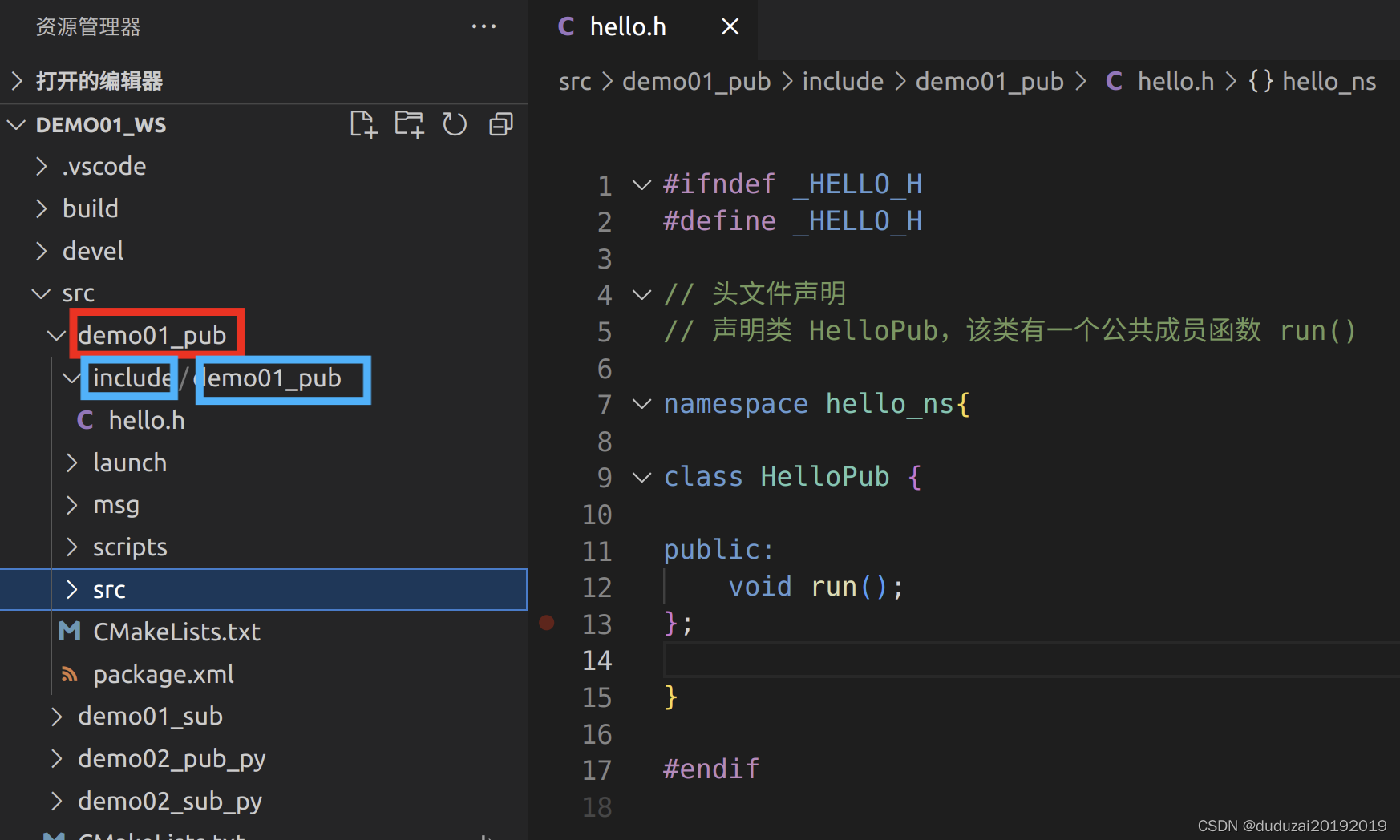
#ifndef _HELLO_H
#define _HELLO_Hnamespace hello_ns{class HelloPub {public:void run();
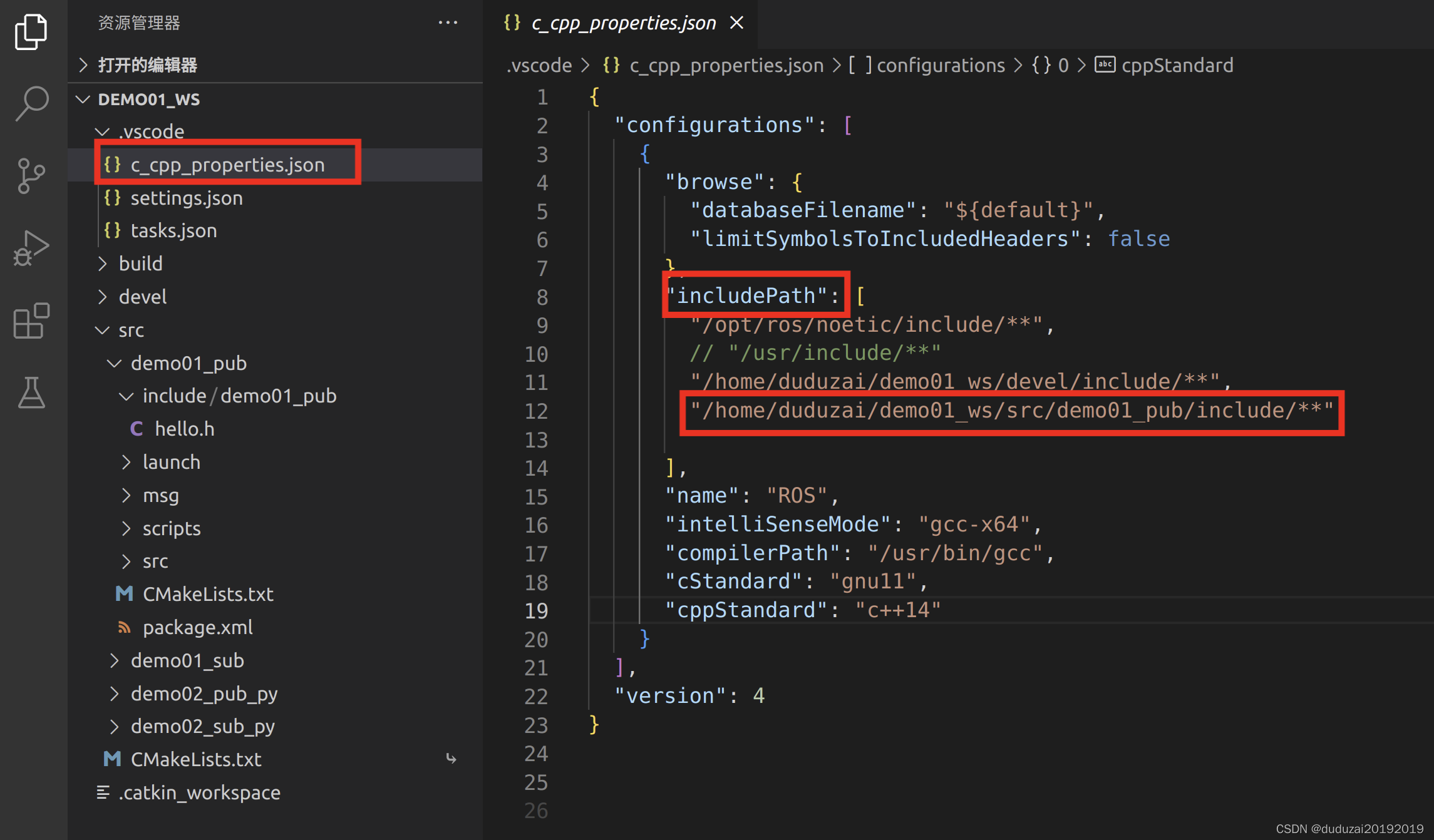
};}#endif1.2 includepath添加头文件路径
添加到功能包的include文件夹
"/home/duduzai/demo01_ws/src/demo01_pub/include/"
1.3 编写可执行文件
在 src 目录下新建文件 hello.cpp
#include " 功能包/.h "
#include "ros/ros.h"
#include "demo01_pub/hello.h"// 命名空间可以更好的管理代码命名,防止命名冲突
namespace hello_ns {void HelloPub::run(){ROS_INFO("自定义头文件的使用....");
}}int main(int argc, char *argv[])
{setlocale(LC_ALL,"");ros::init(argc,argv,"test_head_node");// 创建 hello_ns命名空间 HelloPub类 对象helloPubhello_ns::HelloPub helloPub;// 通过对象.调用run函数helloPub.run();return 0;
}
1.4 配置文件
配置CMakeLists.txt文件
include_directories(
include${catkin_INCLUDE_DIRS}
)
可执行文件配置和以前一样
add_executable(hello src/hello.cpp)target_link_libraries(hello${catkin_LIBRARIES}
)
1.5 编译运行
# 编译
ctrl+shift+B# 运行
roscore
source ./devel/setup.bash
rosrun demo01_pub hello.cpp

⭐⭐⭐嘟嘟崽 ⭐⭐⭐ ⭐⭐⭐祝你成功 ⭐⭐⭐