ROS 2(二)熟悉ROS 2的使用和工具(turtlesim\\ros2\\rqt)

参考内容:http://docs.ros.org/en/humble/Tutorials/Beginner-CLI-Tools/Introducing-Turtlesim/Introducing-Turtlesim.html
1.简介
Turtlesim是一个用于学习ROS 2的轻量级模拟器。它说明了ROS 2在最基本的层面上所做的事情,便于了解以后如何处理真实的机器人或机器人模拟。
ros2工具方便用户管理ROS系统、与ROS系统交互使用的。可以使用它来启动节点、设置参数、收听主题等。
rqt 是 ROS 2 的图形用户界面(GUI)工具。rqt中所做的一切都可以在命令行上完成,但rqt提供了一种更用户友好的方式来操作ROS2元素。
2.Turtlesim
2.1.安装Turtlesim
首先是安装Turtlesim(按照官方流程安装ROS 2的话,实际已经安装好了Turtlesim,只需检查即可)。
安装Turtlesim的命令如下:
sudo apt updatesudo apt install ros-humble-turtlesim检查Turtlesim的安装情况命令如下:
ros2 pkg executables turtlesim运行结果为:
turtlesim draw_square
turtlesim mimic
turtlesim turtle_teleop_key
turtlesim turtlesim_node
2.2.简单使用turtlesim
打开一个终端,输入如下命令:
ros2 run turtlesim turtlesim_node
则会启动turtlesim(这个软件是模拟一个受控的机器人),如下图:
再打开另一个终端,输入如下命令:
ros2 run turtlesim turtle_teleop_key此时可以使用方向键控制小乌龟行进,用来模拟控制机器人。

3.rqt
3.1.安装rqt
正常流程安装ROS 2时,是自动安装好rqt工具的,如果没有安装,则运行如下命令(Ubuntu20.04或更新):
sudo apt updatesudo apt install ~nros-humble-rqt*打开一个终端输入:rqt,则可以启动rqt工具,如下图:

3.2.使用rqt
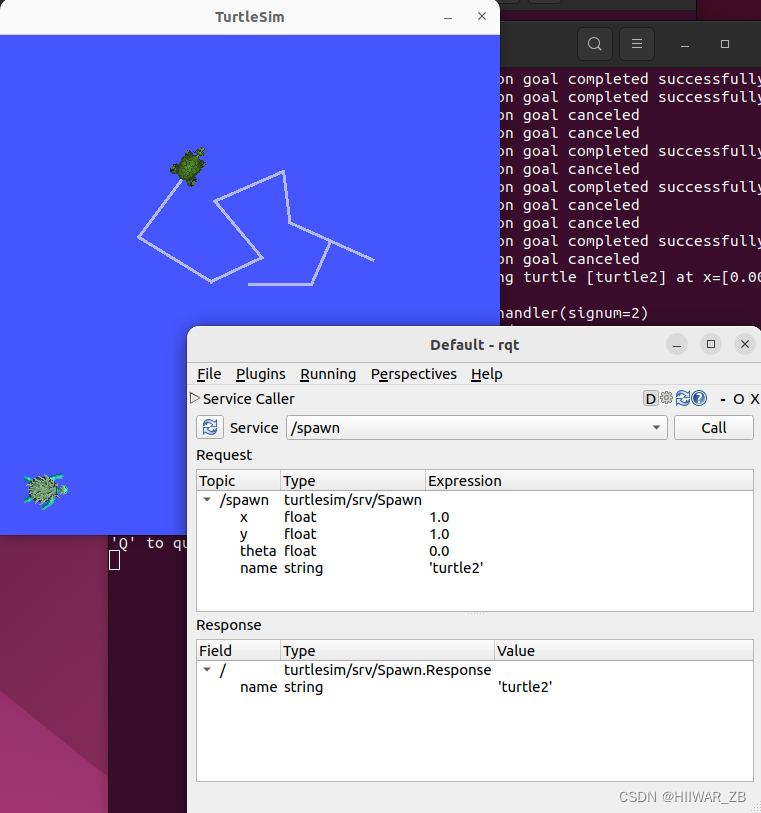
在rqt工具中选择Plugins > Services > Service Caller,就可以列举出所有的服务。
3.2.1.尝试spawn服务
在服务列表中找到spawn服务,在参数栏里可以设置参数,x、y、theta、name,给定参数,之后点击 Call。则turtlesim窗口中会生成第二只乌龟。
rqt 可以完成很多功能,可以自行尝试使用各种菜单工具。