【致敬未来的攻城狮计划】— 连续打卡第十一天:FSP固件库开发点亮第一个灯。

系列文章目录
1.连续打卡第一天:提前对CPK_RA2E1是瑞萨RA系列开发板的初体验,了解一下
2.开发环境的选择和调试(从零开始,加油)
3.欲速则不达,今天是对RA2E1 基础知识的补充学习。
4.e2 studio 使用教程
5.Keil配置使用(使用 RASC 生成 Keil 工程)
6.Keil配置使用(使用 RASC 生成 Keil 工程)
7.(电脑重装系统)学习RA产品家族选型手册
8.问题解决、学习RA寄存器、用寄存器的方式点亮第一个LED灯。
9.FSP固件库开发及FSP配置详解。
文章目录
系列文章目录
前言
一、RA2E1硬件图
二、FSP开发步骤
1.新建工程(本文采用的是 Keil+RASC 开发 也可以使用 官方的 e2-studio 进行开发)
2.工程配置
3.编写代码
初始化模块函数:
代码如下:
总结
满眼月色
前言
FSP库开发点亮第一个LED灯。系列文章有连续九天的文章。有需要的同学可以学习。
一、RA2E1硬件图
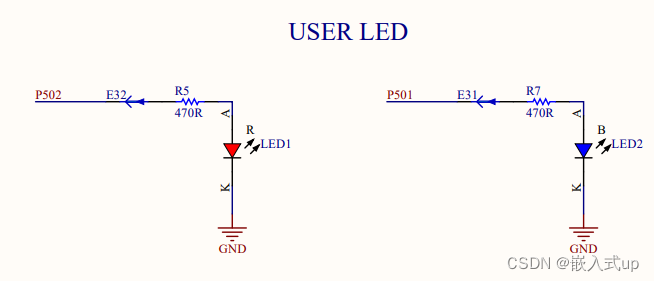
硬件开发板RA2E1 板载的是 红蓝 的两个彩色LED灯。
二、FSP开发步骤
1.新建工程(本文采用的是 Keil+RASC 开发 也可以使用 官方的 e2-studio 进行开发)
Keil+RASC文章链接:
(43条消息) 【致敬未来的攻城狮计划】— 连续打卡第五天:Keil配置使用(使用 RASC 生成 Keil 工程)_嵌入式up的博客-CSDN博客
e2-studio 进行开发:
(45条消息) 【致敬未来的攻城狮计划】— 连续打卡第四天:e2 studio 使用教程_嵌入式up的博客-CSDN博客
可以根据以上文章去新建工程和学习。

2.工程配置
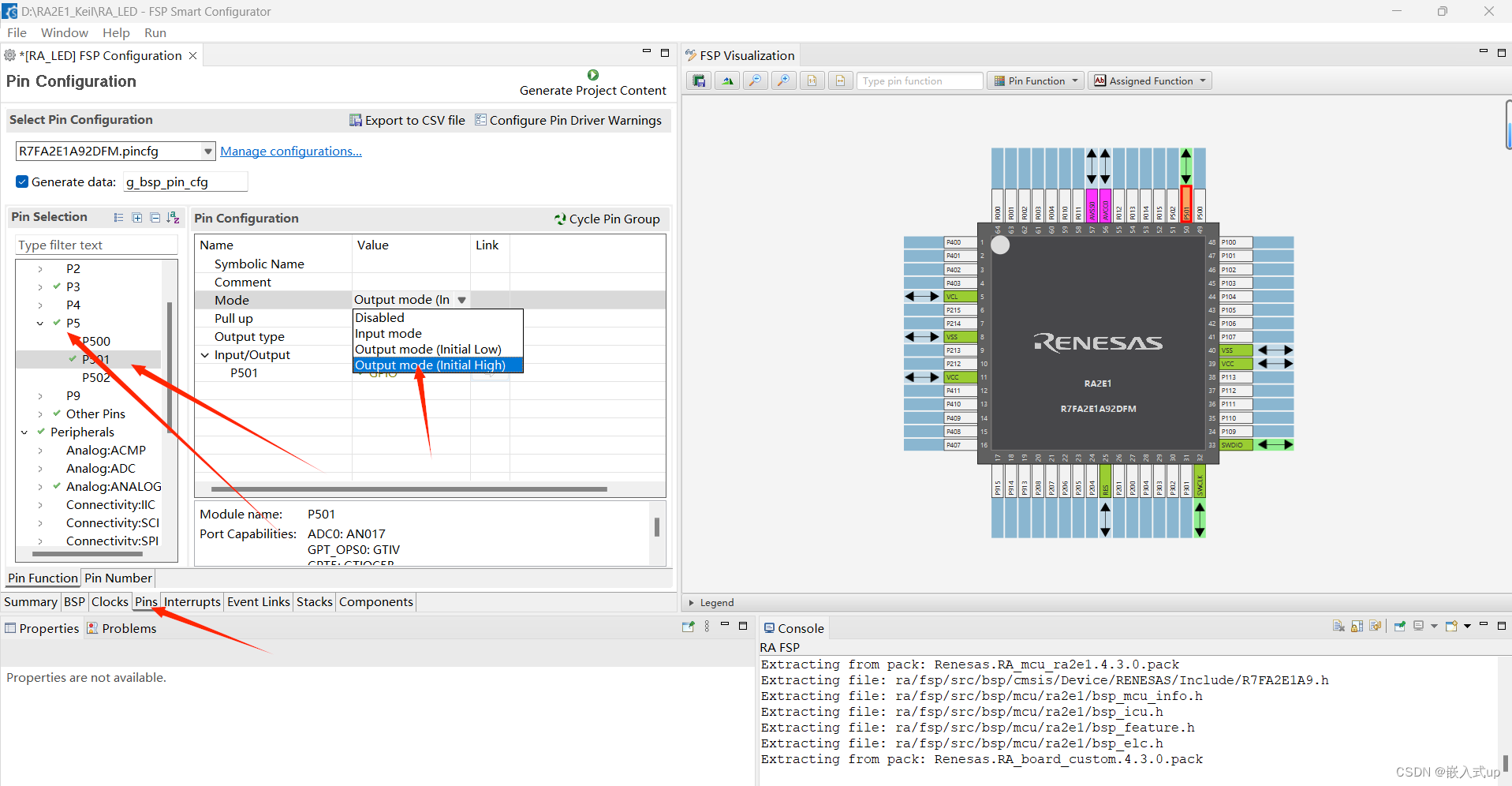
在 FSP 配置界面里面点开 “Pins”-> “Ports”-> “P5”-> “P501”, 然后将连接到LED灯的 IO 引脚的 “Mode” 属性配置为 “Output mode (Initial High)”, 表示该引脚默认输出高电平,其他的属性默认即可。 两个LED引脚 “P501”、“P502” 也是按照这样进行配置。
Pin Configuration 属性介绍:
|
属性 |
描述 |
|---|---|
|
Mode |
IO引脚的工作模式,包括输入模式和输出模式,选择输出模式时可以设置引脚的初始输出电平。 |
|
Pull up |
IO引脚是否上拉。 |
|
Drive Capacity |
IO引脚的驱动能力设置。 |
|
Output type |
IO引脚的输出类型。可以选 CMOS 推挽输出或开漏输出。 |
配置成功,点击按钮“Generate Project Content”:
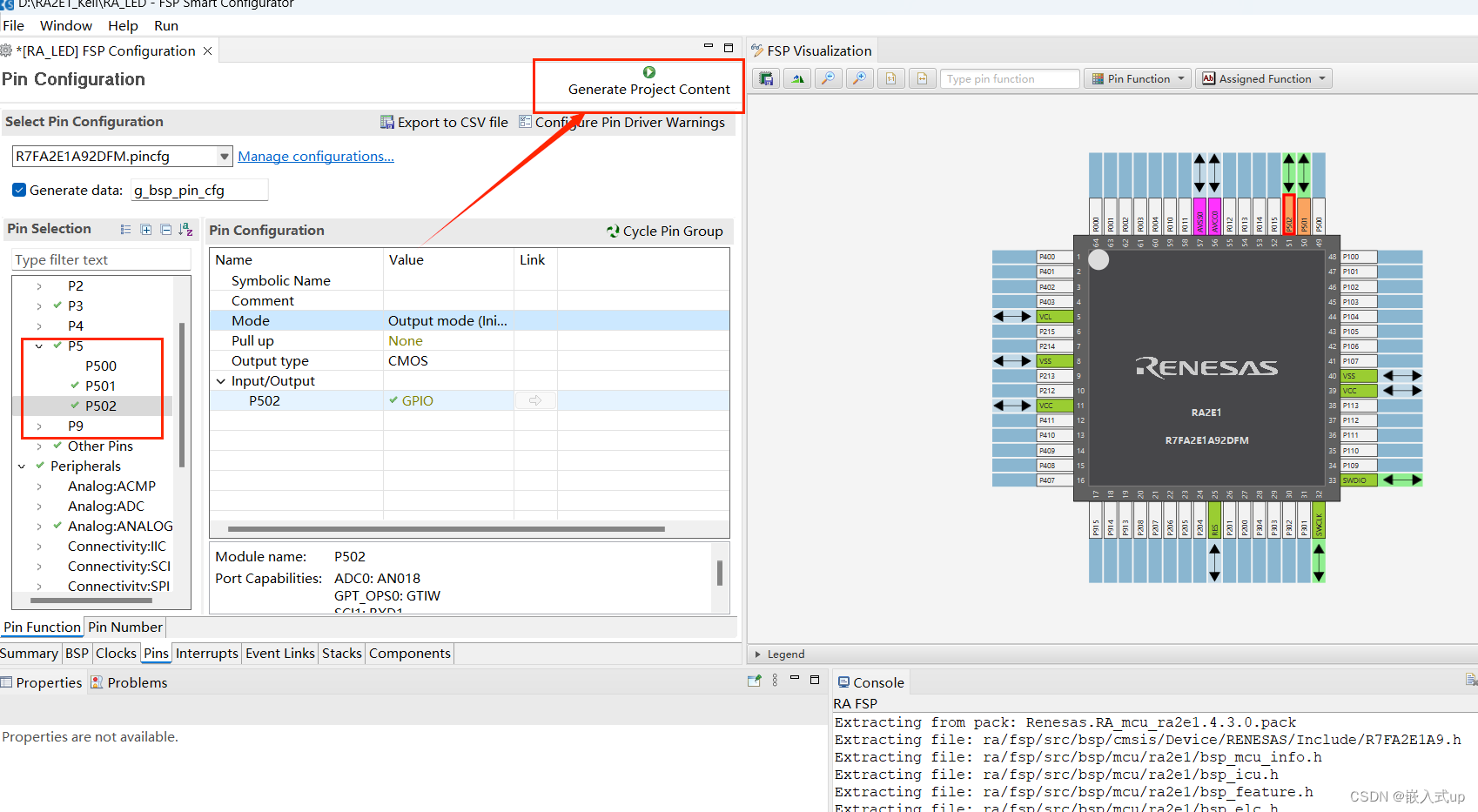
如图所示,即是配置成功:
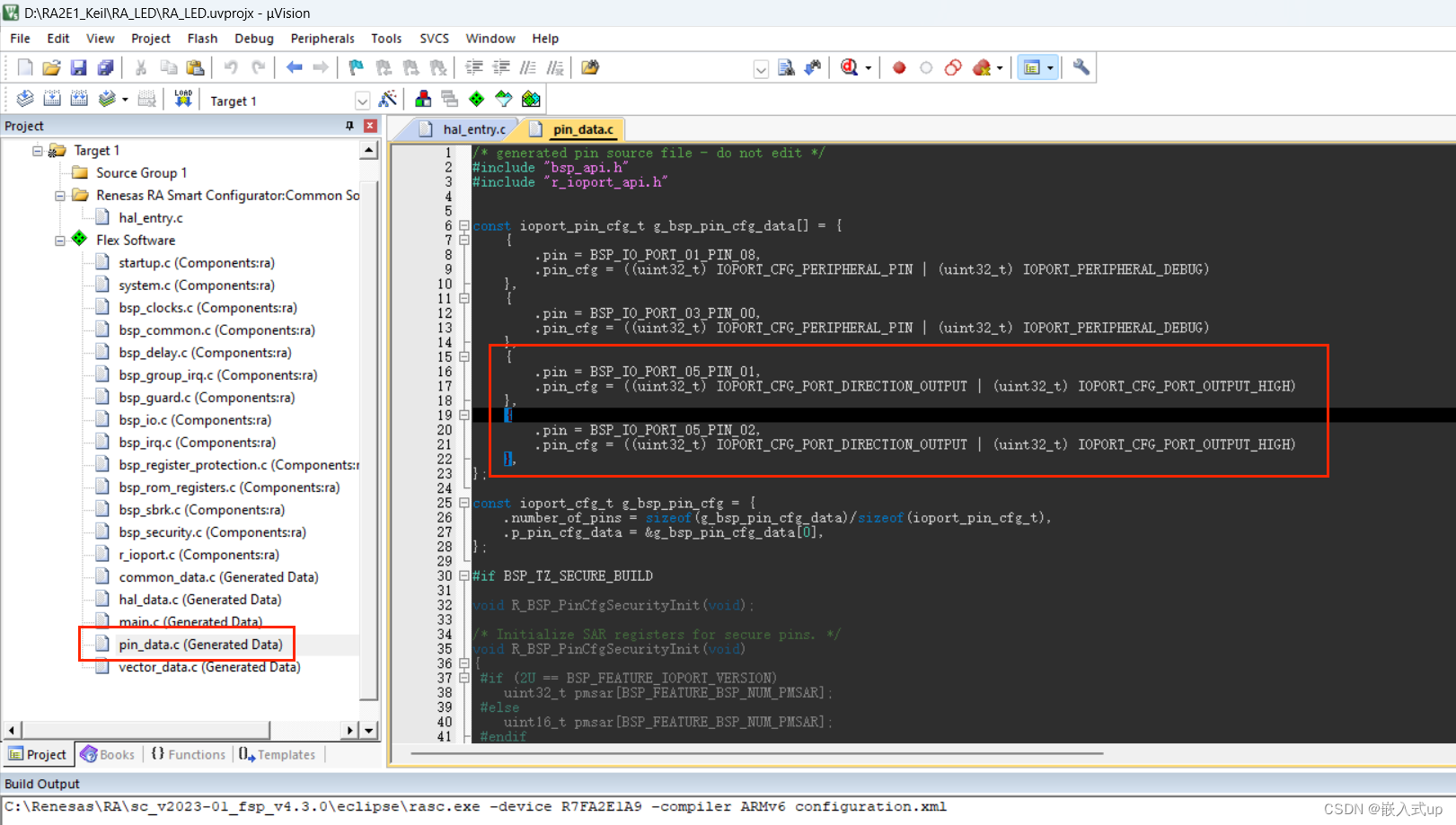
在r_ioport 中 找到 控制io的 函数原型。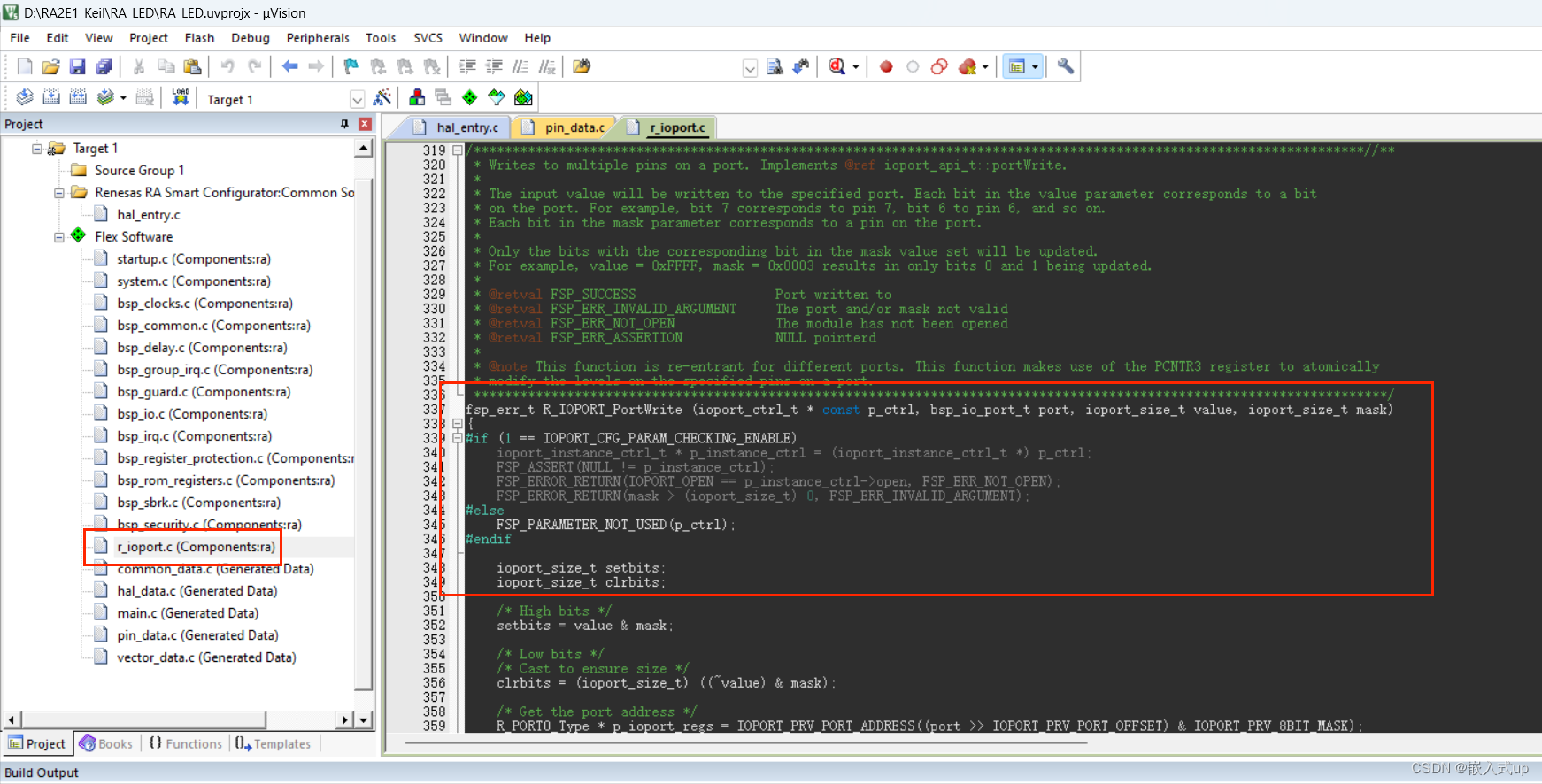
3.编写代码
当使用 RTOS 时,程序从 main 函数开始进行线程调度;
当没有使用 RTOS 时,C语言程序的入口函数 main 函数调用了 hal_entry 函数。
由于我们新建的工程是没有选用 RTOS 的,因此,用户程序从 hal_entry 函数开始执行。 我们直接打开 “\\src\\hal_entry.c” 文件,在 hal_entry 函数里面编写我们的代码。
实现效果:
实现LED灯的闪烁效果,其思路非常地简单:首先初始化配置 LED 引脚, 然后在一个死循环里面重复此流程:LED 灯亮,延时1s,LED 灯灭,延时1s,然后 LED 灯又亮。 如此反复循环,就能实现 LED 灯的闪烁效果。
初始化模块函数:
首先,我们需要通过 R_IOPORT_Open 函数来初始化 IOPORT 模块, 在调用 R_IOPORT_Open
函数时,需要传入控制块参数 g_ioport_ctrl 和配置参数 g_ioport.p_cfg。
//调用 R_IOPORT_Open 函数来初始化 IOPORT 模块
R_IOPORT_Open (&g_ioport_ctrl, g_ioport.p_cfg);注意:实际上,由于在 R_BSP_WarmStart 函数中已经打开了一个 IOPORT 模块, 因此并不需要重复打开 IOPORT 模块,虽然重复打开也不会出错。
引脚控制高低电平函数:
成功打开 IOPORT 模块后,说明 IO 引脚已经全部初始化完成。接着让程序继续往下执行,进入到 while(1) 死循环。 在 while(1) 循环里,我们使用 R_IOPORT_PinWrite 和 R_BSP_SoftwareDelay 这两个函数来实现前面所述的思路。
使用 R_IOPORT_PinWrite 函数可以控制引脚的输出高低电平,从而控制 LED 灯的亮灭。 它的第一个参数需要传入控制块 g_ioport_ctrl,第二个参数传入IO端口和引脚号,第三个参数传入IO引脚电平。
fsp_err_t R_IOPORT_PinWrite (ioport_ctrl_t * const p_ctrl, bsp_io_port_pin_t pin, bsp_io_level_t level);延时函数:
使用 R_BSP_SoftwareDelay 函数可以进行延时,LED 灯维持亮和灭这两种状态的时间由此函数决定。 它的第一个参数表示延时的时间量,第二个参数表示时间单位。
void R_BSP_SoftwareDelay (uint32_t delay, bsp_delay_units_t units);时间单位参数可选:
-
BSP_DELAY_UNITS_SECONDS,表示秒;
-
BSP_DELAY_UNITS_MILLISECONDS,表示毫秒;
-
BSP_DELAY_UNITS_MICROSECONDS,表示微秒。
代码如下:
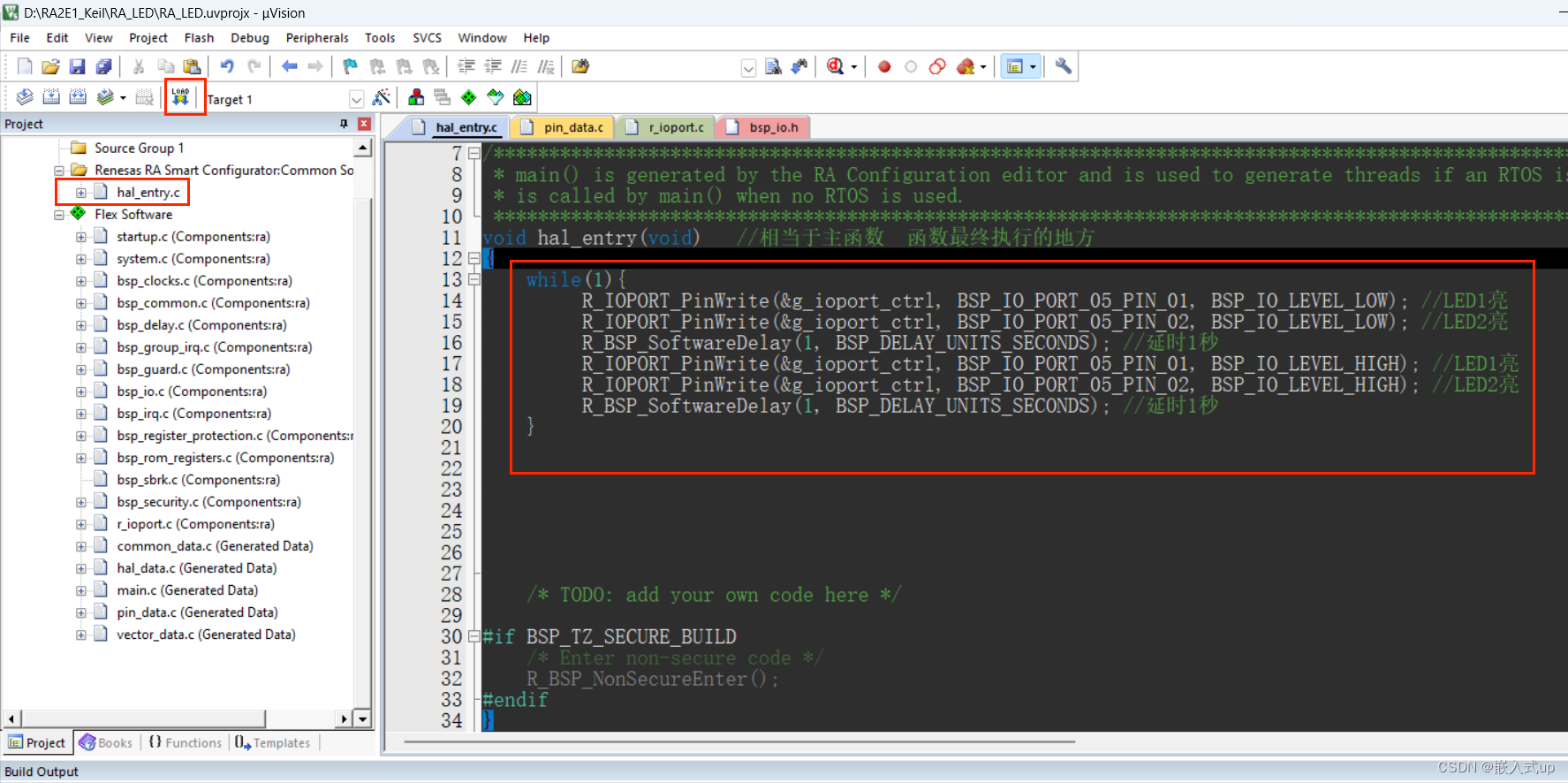
void hal_entry(void) //相当于主函数 函数最终执行的地方
{while(1){R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_01, BSP_IO_LEVEL_LOW); //LED1亮R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_02, BSP_IO_LEVEL_LOW); //LED2亮R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS); //延时1秒R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_01, BSP_IO_LEVEL_HIGH); //LED1亮R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_05_PIN_02, BSP_IO_LEVEL_HIGH); //LED2亮R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS); //延时1秒}/* TODO: add your own code here */#if BSP_TZ_SECURE_BUILD/* Enter non-secure code */R_BSP_NonSecureEnter();
#endif
}视频效果:
RA2E1第一次点灯
总结
滴滴!!!点灯大师成就就此达成。