在研发机器人/自动驾驶时,可能没有遥控器,又或者是仿真环境等情况,常常需要通过键盘控制小车。
本节详细讲述了如何通过键盘来控制ROS小车,附有全套源码。
本程序通过向ROS发布/cmd_vel话题来控制小车移动。
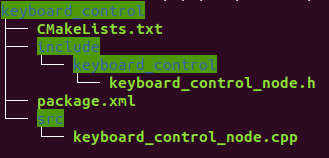
①仿照下图目录树新建功能包
②编写keyboard_control_node.cpp,代码如下
#include <fcntl.h>
51K歌软件