ROS学习第五节——话题通信之发布

首先补充一个命令ROS计算图
rosrun rqt_graph rqt_graph1.原理讲解
话题通信实现模型是比较复杂的,该模型如下图所示,该模型中涉及到三个角色:
- ROS Master (管理者)
- Talker (发布者)
- Listener (订阅者)
ROS Master 负责保管 Talker 和 Listener 注册的信息,并匹配话题相同的 Talker 与 Listener,帮助 Talker 与 Listener 建立连接,连接建立后,Talker 可以发布消息,且发布的消息会被 Listener 订阅。
整个流程由以下步骤实现: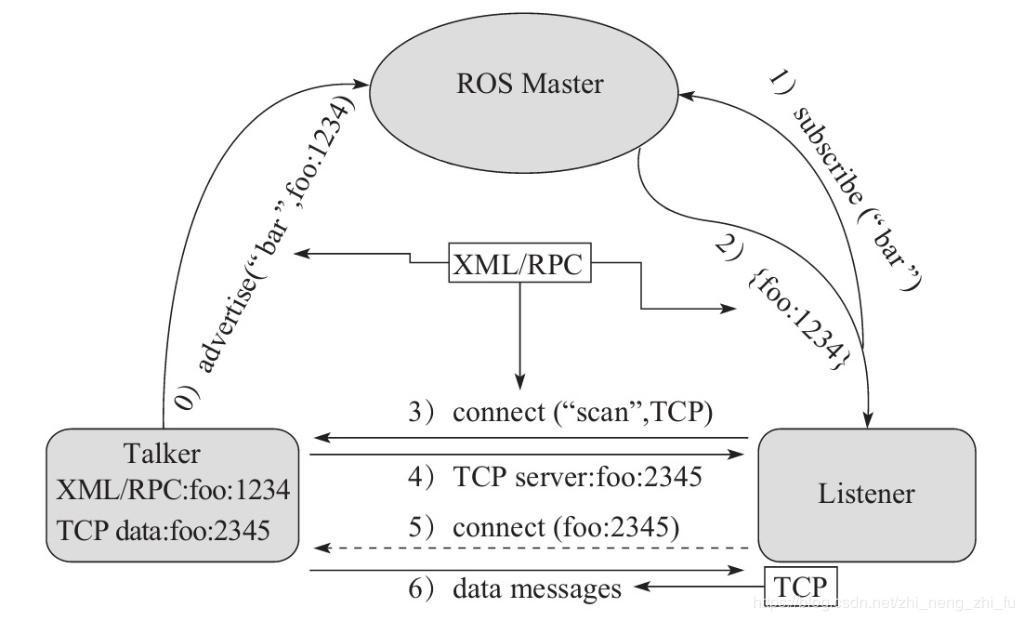
0.Talker注册
Talker启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含所发布消息的话题名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Listener注册
Listener启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要订阅消息的话题名。ROS Master 会将节点的注册信息加入到注册表中。
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Talker 和 Listener,并通过 RPC 向 Listener 发送 Talker 的 RPC 地址信息。
3.Listener向Talker发送请求
Listener 根据接收到的 RPC 地址,通过 RPC 向 Talker 发送连接请求,传输订阅的话题名称、消息类型以及通信协议(TCP/UDP)。
4.Talker确认请求
Talker 接收到 Listener 的请求后,也是通过 RPC 向 Listener 确认连接信息,并发送自身的 TCP 地址信息。
5.Listener与Talker件里连接
Listener 根据步骤4 返回的消息使用 TCP 与 Talker 建立网络连接。
6.Talker向Listener发送消息
连接建立后,Talker 开始向 Listener 发布消息。
注意1:上述实现流程中,前五步使用的 RPC协议,最后两步使用的是 TCP 协议
注意2: Talker 与 Listener 的启动无先后顺序要求
注意3: Talker 与 Listener 都可以有多个
注意4: Talker 与 Listener 连接建立后,不再需要 ROS Master。也即,即便关闭ROS Master,Talker 与 Listern 照常通信。
2.操作实现
2.1发布方代码实现
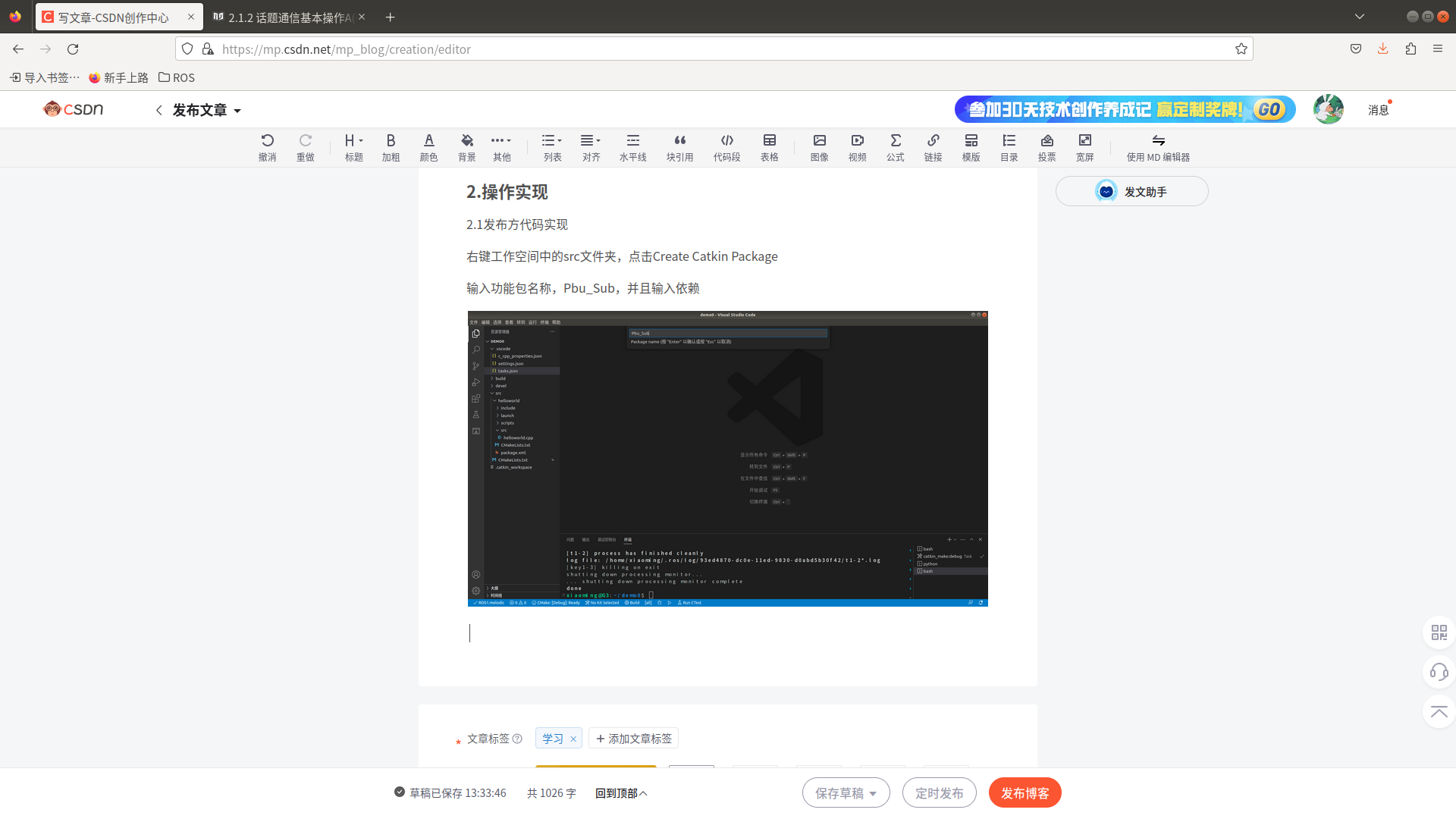
右键工作空间中的src文件夹,点击Create Catkin Package
输入功能包名称,Pbu_Sub,并且输入依赖
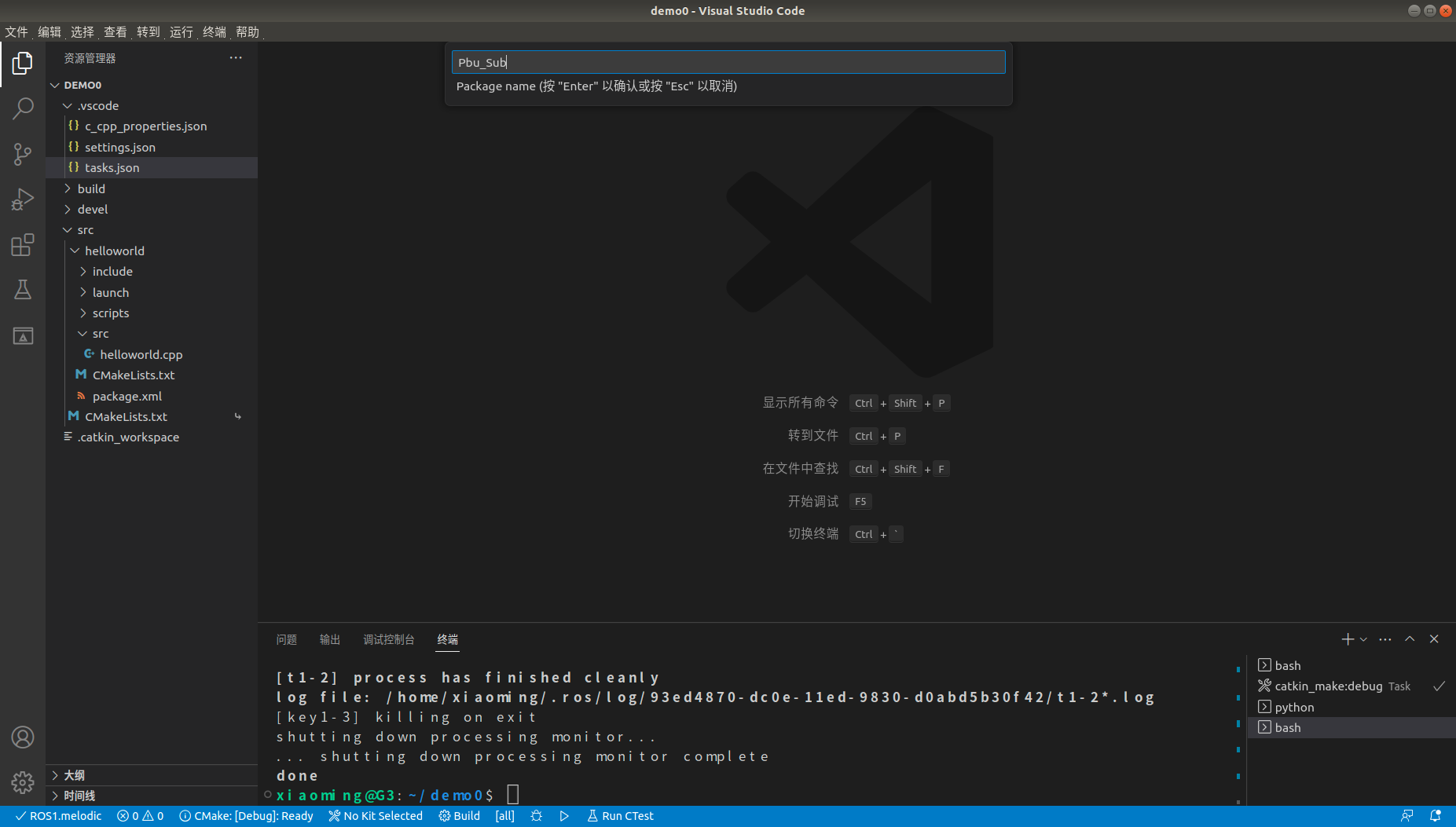
在Pbu_Sub功能包里面的src文件夹内添加demo01_pub.c
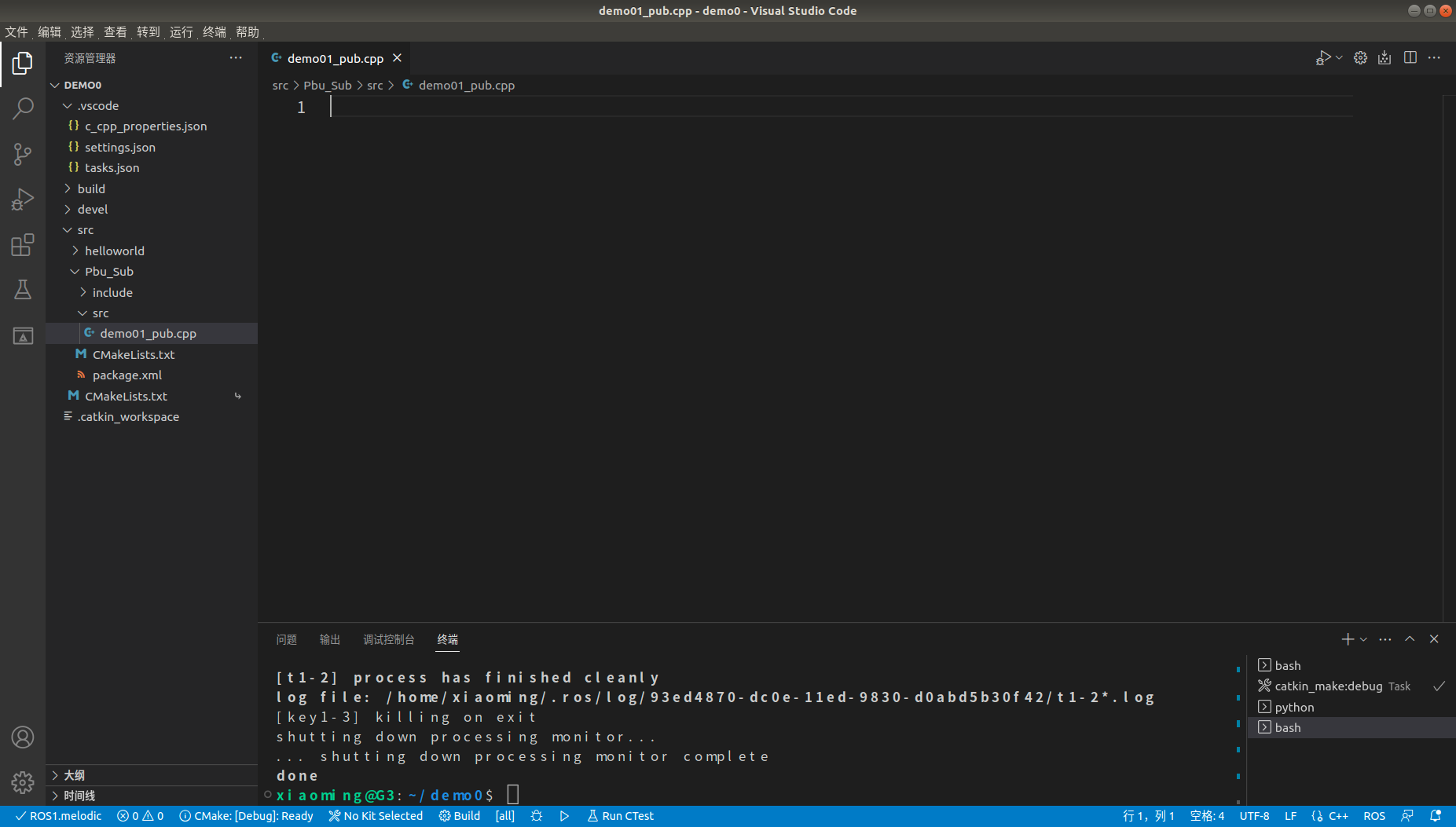
编写代码
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h" //普通文本类型的消息
#include <sstream>int main(int argc, char *argv[])
{ //2.初始化 ROS 节点:命名(唯一)// 参数1和参数2 后期为节点传值会使用// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一ros::init(argc,argv,"talker");//3.实例化 ROS 句柄ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能//4.实例化 发布者 对象//泛型: 发布的消息类型//参数1: 要发布到的话题//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",10);//5.组织被发布的数据,并编写逻辑发布数据//数据(动态组织)std_msgs::String msg;//节点不死while (ros::ok()){msg.data ="hello";//发布消息pub.publish(msg);}return 0;
}
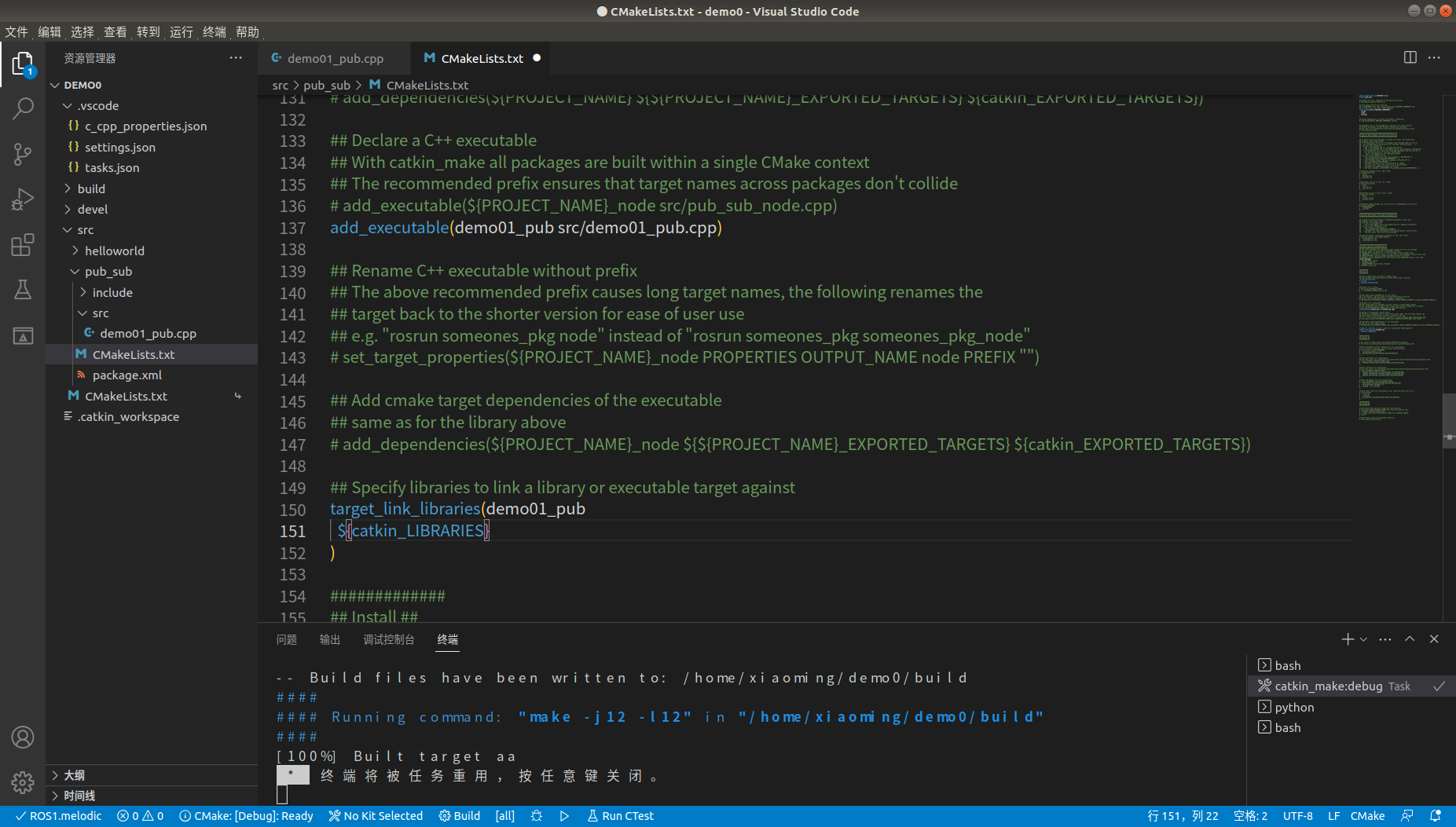
配置CMakeLists.txt
add_executable(demo01_pub src/demo01_pub.cpp) 
target_link_libraries(demo01_pub${catkin_LIBRARIES}
)
接下来开始运行
还是先开启roscore
运行
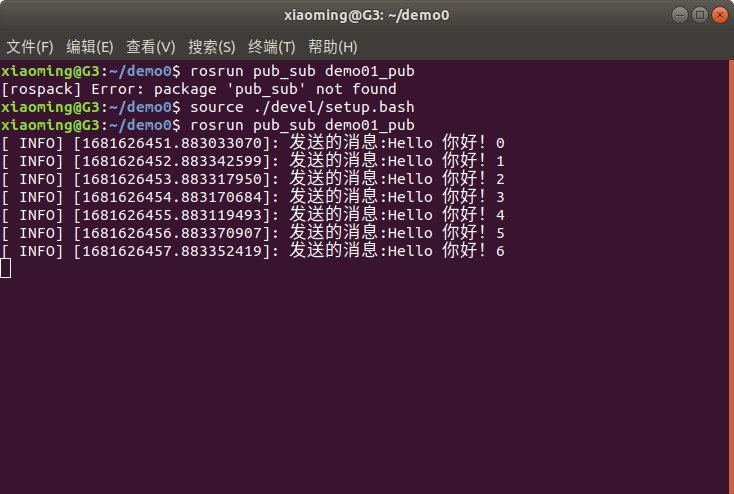
source ./devel/setup.bash
rosrun pub_sub demo01_pub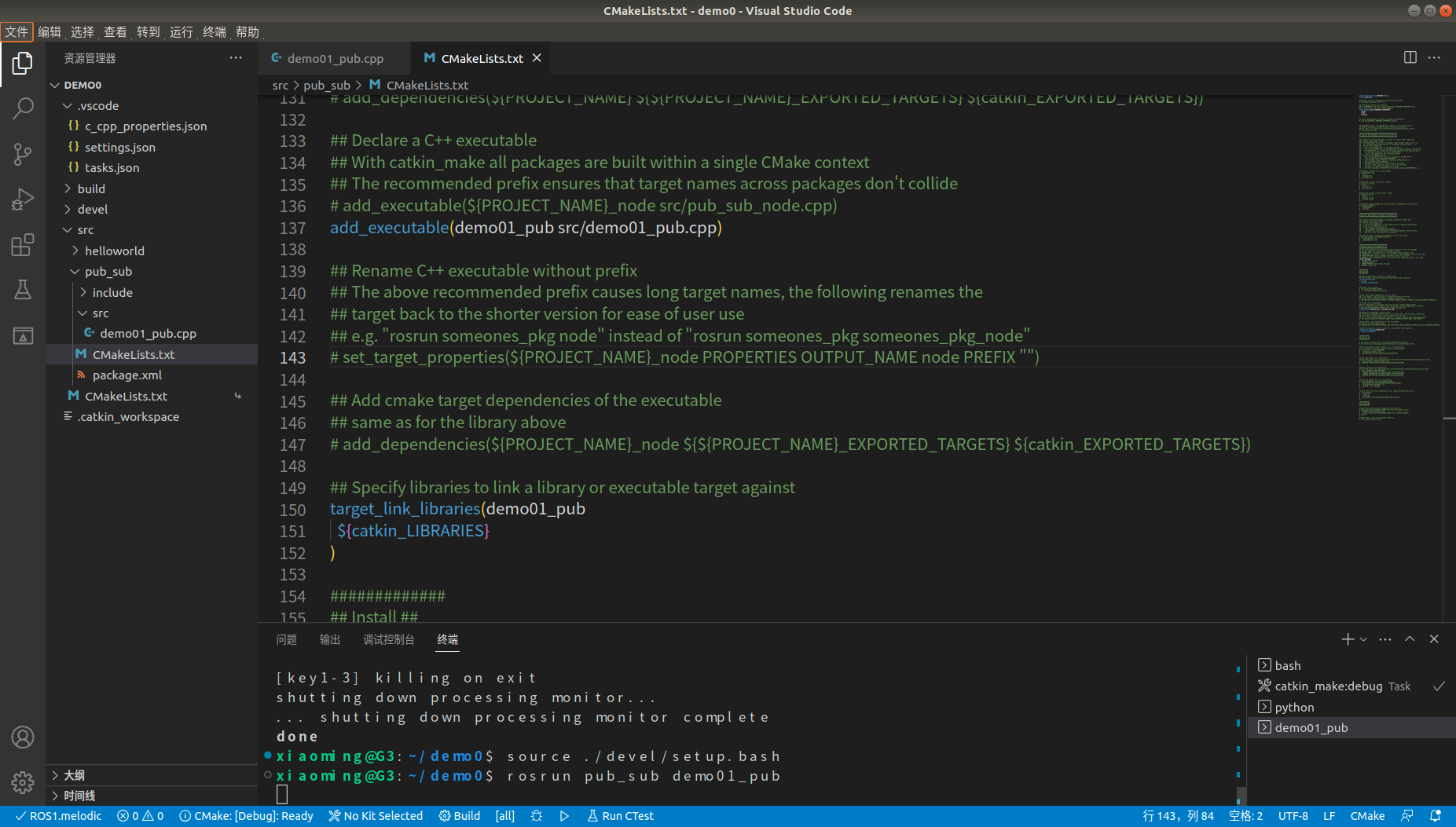
此时无法观看到显示效果,需要借助其他工具查看
新打开一个终端
输入就可以看到效果
rostopic echo chatter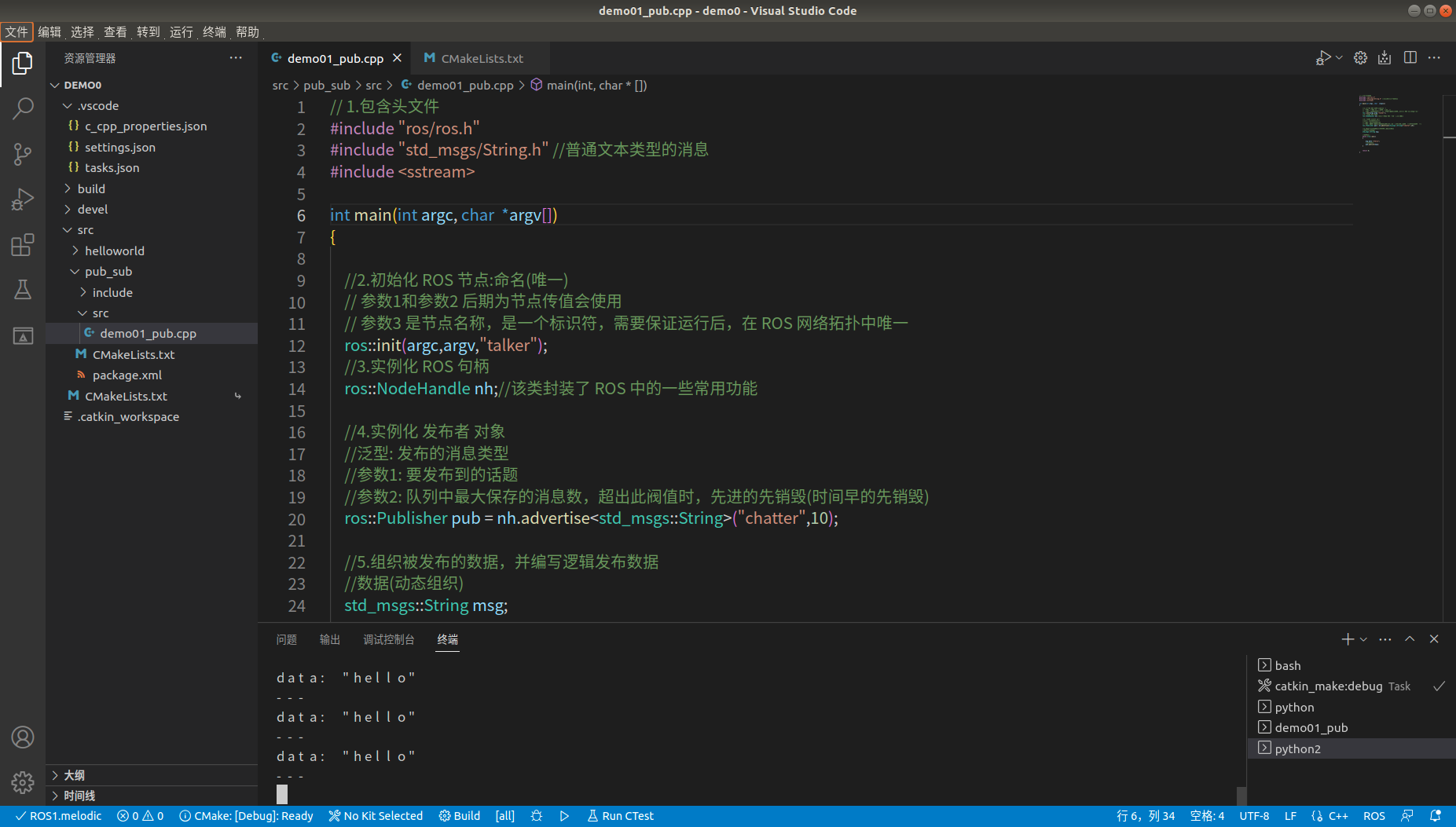
https://download.csdn.net/download/qq_45685327/87695056
增加代码功能,有一定频率输出,并通过日志输出结果
/*需求: 实现基本的话题通信,一方发布数据,一方接收数据,实现的关键点:1.发送方2.接收方3.数据(此处为普通文本)PS: 二者需要设置相同的话题消息发布方:循环发布信息:HelloWorld 后缀数字编号实现流程:1.包含头文件 2.初始化 ROS 节点:命名(唯一)3.实例化 ROS 句柄4.实例化 发布者 对象5.组织被发布的数据,并编写逻辑发布数据*/
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h" //普通文本类型的消息
#include <sstream>int main(int argc, char *argv[])
{ //设置编码setlocale(LC_ALL,"");//2.初始化 ROS 节点:命名(唯一)// 参数1和参数2 后期为节点传值会使用// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一ros::init(argc,argv,"talker");//3.实例化 ROS 句柄ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能//4.实例化 发布者 对象//泛型: 发布的消息类型//参数1: 要发布到的话题//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",10);//5.组织被发布的数据,并编写逻辑发布数据//数据(动态组织)std_msgs::String msg;// msg.data = "你好啊!!!";std::string msg_front = "Hello 你好!"; //消息前缀int count = 0; //消息计数器//逻辑(一秒10次)ros::Rate r(1);//节点不死while (ros::ok()){//使用 stringstream 拼接字符串与编号std::stringstream ss;ss << msg_front << count;msg.data = ss.str();//发布消息pub.publish(msg);//加入调试,打印发送的消息ROS_INFO("发送的消息:%s",msg.data.c_str());//根据前面制定的发送贫频率自动休眠 休眠时间 = 1/频率;r.sleep();count++;//循环结束前,让 count 自增//暂无应用ros::spinOnce();}return 0;
}
开启roscore
另起一个终端
source ./devel/setup.bash
rosrun pub_sub demo01_pub
另起一个终端
rostopic echo chatter
以上的代码出现了乱码问题,以下作出优化
https://download.csdn.net/download/qq_45685327/87695056
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h" //普通文本类型的消息
#include <sstream>int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");//2.初始化 ROS 节点:命名(唯一)// 参数1和参数2 后期为节点传值会使用// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一ros::init(argc,argv,"talker");//3.实例化 ROS 句柄ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能//4.实例化 发布者 对象//泛型: 发布的消息类型//参数1: 要发布到的话题//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",10);//5.组织被发布的数据,并编写逻辑发布数据//数据(动态组织)std_msgs::String msg;//发布频率ros::Rate rate(1) ;//设置编号int count = 0;//节点不死while (ros::ok()){count ++;//实现字符串的拼接std::stringstream ss;ss<<"hello--->"<<count;msg.data =ss.str();//发布消息pub.publish(msg);//添加日志ROS_INFO("发布的数据是:%s",ss.str().c_str());rate.sleep();}return 0;
}