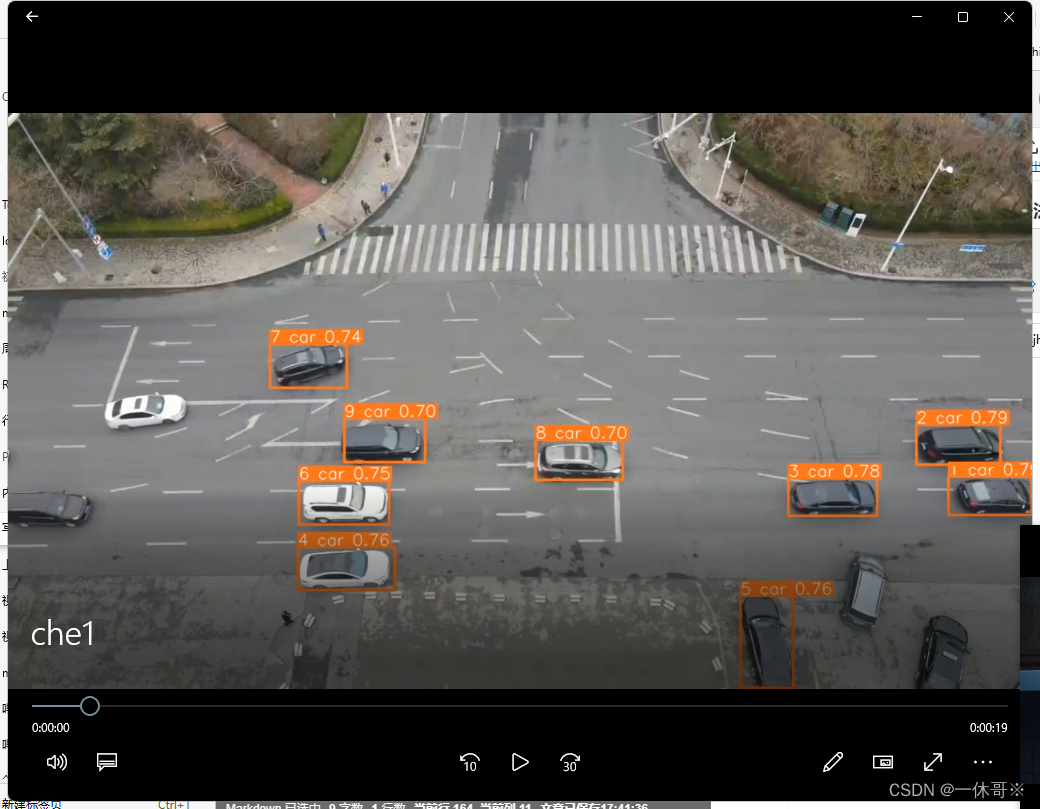
追踪行人和车辆,并使用deep-person-reid训练自定义追踪模型(行人和车辆两类)

deep-person-reid训练自定义模型
- 1. 准备代码
- 2. market1501格式
- 3 转换格式代码
- 4. 训练
- 5 追踪测试
仅供参考,目前实现的格式转化还是存在一定的问题,导致训练后的模型精度很高,分配上还是没有完全符合market1501的格式。依照这样训练的模型,效果还可以,
1. 准备代码
- yolov5追踪代码
- deep-person-reid代码
git clone https://github.com/KaiyangZhou/deep-person-reid.git
2. market1501格式
目录介绍
1) “bounding_box_test”——用于测试集的 750 人,包含 19,732 张图像,前缀为 0000 表示在提取这 750 人的过程中DPM检测错的图(可能与query是同一个人),-1 表示检测出来其他人的图(不在这 750 人中)
2) “bounding_box_train”——用于训练集的 751 人,包含 12,936 张图像
3) “query”——为 750 人在每个摄像头中随机选择一张图像作为query,因此一个人的query最多有 6 个,共有 3,368 张图像
4) “gt_query”——matlab格式,用于判断一个query的哪些图片是好的匹配(同一个人不同摄像头的图像)和不好的匹配(同一个人同一个摄像头的图像或非同一个人的图像)
5) “gt_bbox”——手工标注的bounding box,用于判断DPM检测的bounding box是不是一个好的box
命名规则
以 0001_c1s1_000151_01.jpg 为例
1) 0001 表示每个人的标签编号,从0001到1501;
2) c1 表示第一个摄像头(camera1),共有6个摄像头;
3) s1 表示第一个录像片段(sequece1),每个摄像机都有数个录像段;
4) 000151 表示 c1s1 的第000151帧图片,视频帧率25fps;
5) 01 表示 c1s1_001051 这一帧上的第1个检测框,由于采用DPM检测器,对于每一帧上的行人可能会框出好几个bbox。00 表示手工标注框
3 转换格式代码
import os
import shutil
import random# 输入数据文件夹
input_pedestrian_folder = r"F:\\sjh\\code\\deep-person-reid\\reid-data\\my_data\\person"
input_vehicle_folder = r"F:\\sjh\\code\\deep-person-reid\\reid-data\\my_data\\car"# 输出数据文件夹
output_root = r"F:\\sjh\\code\\deep-person-reid\\reid-data\\my_data/Market1501"
bounding_box_train = os.path.join(output_root, "bounding_box_train")
bounding_box_test = os.path.join(output_root, "bounding_box_test")
query = os.path.join(output_root, "query")if os.path.exists(bounding_box_train):shutil.rmtree(bounding_box_train)shutil.rmtree(bounding_box_test)shutil.rmtree(query)
os.makedirs(bounding_box_train, exist_ok=True)
os.makedirs(bounding_box_test, exist_ok=True)
os.makedirs(query, exist_ok=True)def rename_and_split_images(input_folder, pid_start, camid, query_bool=False,classes=0):pid = pid_startimage_files = os.listdir(input_folder)frame = 1for image_file in image_files:# 为每个行人/车辆分配一个唯一的pid# pid += 1# if classes == 1:# pid = 1# elif classes == 2:# pid = 2src_path = os.path.join(input_folder, image_file)# 在这里,我们假设每个输入文件夹只有一个摄像头和连续的帧frame += 1new_image_name = f"{pid:04d}_c{camid}s{camid}_{frame:06d}.jpg"dest_path = os.path.join(bounding_box_train, new_image_name)shutil.copyfile(src_path, dest_path)# 随机选择一些图像分配给bounding_box_test和queryif random.random() < 0.1:frame += 1new_image_name = f"{pid:04d}_c{camid}s{camid}_{frame:06d}.jpg"dest_path = os.path.join(bounding_box_test, new_image_name)shutil.copyfile(src_path, dest_path)frame += 1if query_bool:camid=2new_image_name = f"{pid:04d}_c{camid}s{camid}_{frame:06d}.jpg"dest_path = os.path.join(query, new_image_name)shutil.copyfile(src_path, dest_path)return pid# 处理行人数据
last_pid = rename_and_split_images(input_pedestrian_folder, 0, 1,query_bool=True,classes=1)# 处理车辆数据
rename_and_split_images(input_vehicle_folder, 1, 2, query_bool=True,classes=2)
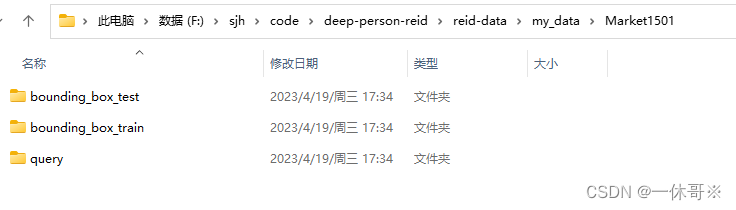
数据存放位置,最后会生成market1501,用于训练的三个文件train、test、query:
代码命名规则:
0000_c1s1_000002.jpg
- 0000 表示种类人,0001表示车辆种类
- c1s1表示摄像机和录像片段,全部为1即可,但是query里全部设为了c2s2。
- 000002表示帧数,每类的所有照片按照不同帧数划分
4. 训练
新建一个train.py文件
import torchreid
if __name__ == '__main__':datamanager = torchreid.data.ImageDataManager(root="reid-data",#/market1501sources="market1501",targets="market1501",height=256,width=128,batch_size_train=36,batch_size_test=1,transforms=["random_flip", "random_crop"])model = torchreid.models.build_model(name="resnet50",num_classes=datamanager.num_train_pids,loss="softmax",pretrained=True)model = model.cuda()optimizer = torchreid.optim.build_optimizer(model,optim="adam",lr=0.0003)scheduler = torchreid.optim.build_lr_scheduler(optimizer,lr_scheduler="single_step",stepsize=20)engine = torchreid.engine.ImageSoftmaxEngine(datamanager,model,optimizer=optimizer,scheduler=scheduler,label_smooth=True)engine.run(save_dir="log/resnet50",max_epoch=20,eval_freq=1,print_freq=1,test_only=False)
训练后会得到一个追踪模型,基于resnet50
5 追踪测试
- 将训练后的追踪模型放到追踪代码目录下,并命名为weights/resnet50_market1501.pt。
- 下载追踪代码后,修改参数如下
parser.add_argument('--yolo-weights', nargs='+', type=Path, default=WEIGHTS / 'yolov5s.pt', help='model.pt path(s)')
parser.add_argument('--reid-weights', type=Path, default=WEIGHTS / 'resnet50_market1501.pt')
parser.add_argument('--tracking-method', type=str, default='bytetrack', help='strongsort, ocsort, bytetrack')#bytetrack最快,效果也比较好