自主机器人概述

自主机器人
自主机器人定义:自主机器人就是一个机器人可以在没有外界干扰的情况下,具备高自动化程度,可以执行任务的机器人。
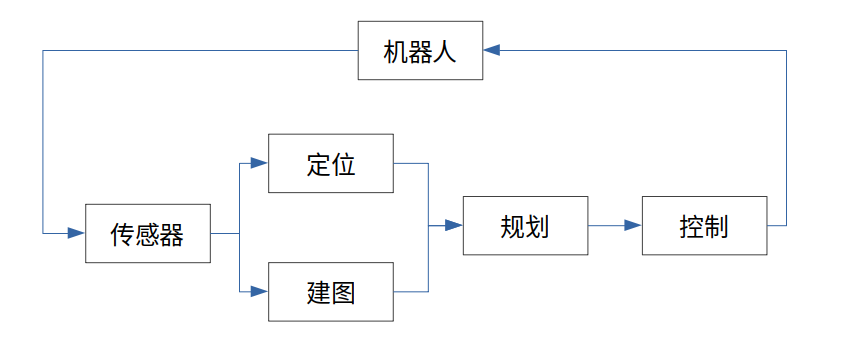
自主机器人组成:感知-规划-控制 的行动回环
控制回路如下图
自主机器人应用:

基于视觉的空中机器人

基于激光雷达空中机器人
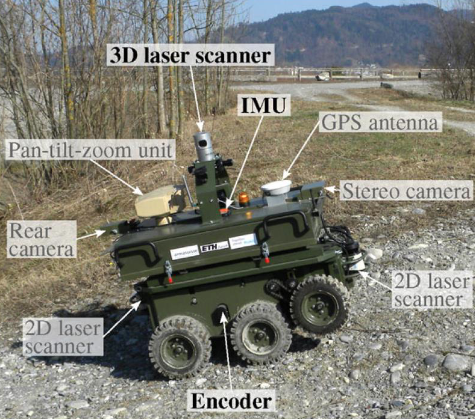
多传感器融合的地面机器人

水下机器人
总结一下什么是自主机器人:
- 1 需要状态估计(定位)
要求低延时、高精度、高一致性 - 2 感知
利用传感器融合建立一个周围环境的三维地图
要求 3D 测量 稠密感知 用于规划的融合地图 - 3 运动规划
具备复杂或者位置环境的规划功能
安全并且符合机器人动力学
有限的传感器和计算力 - 4 控制
控制器实现所生成的轨迹
自主机器人应用案例
 灾后重建机器人
灾后重建机器人

扫地机器人
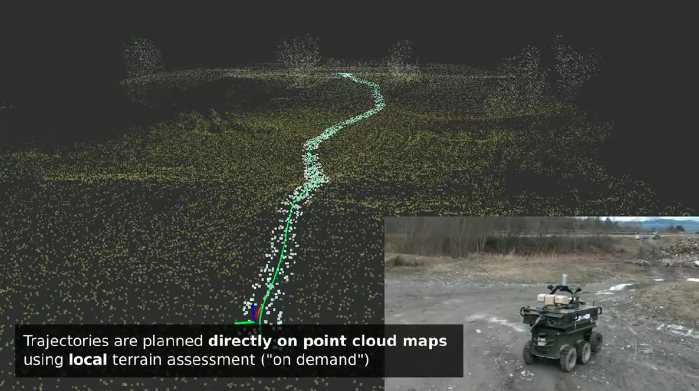
野外越野机器人
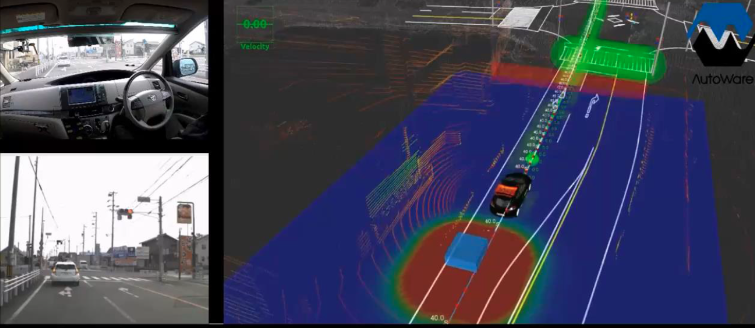
自动驾驶
自主机器人相关实验室
- University of Pennsylvania(宾夕法尼亚州大学)
主页:www.kumarrobotics.org - Massachusetts Institute of Technology(麻省理工大学)
主页:www.mit.edu/~jhow
主页:groups.csail.mit.edu/rrg - Carnegie Mellon University(卡内基梅隆大学)
主页:www.rislab.org
主页:theairlab.org - University of California, Berkeley(加利福尼亚大学伯克利分校)
- ETH Zurich(苏黎世联邦理工学院)
主页:asl.ethz.ch
主页:raffaello.name - University of Zurich(苏黎世大学)
主页:rpg.ifi.uzh.ch - Hong Kong University of Science Technology(香港科技大学)
主页:uav.ust.hk
主页:ram-lab.com