基于matlab仿真机械手

一、前言
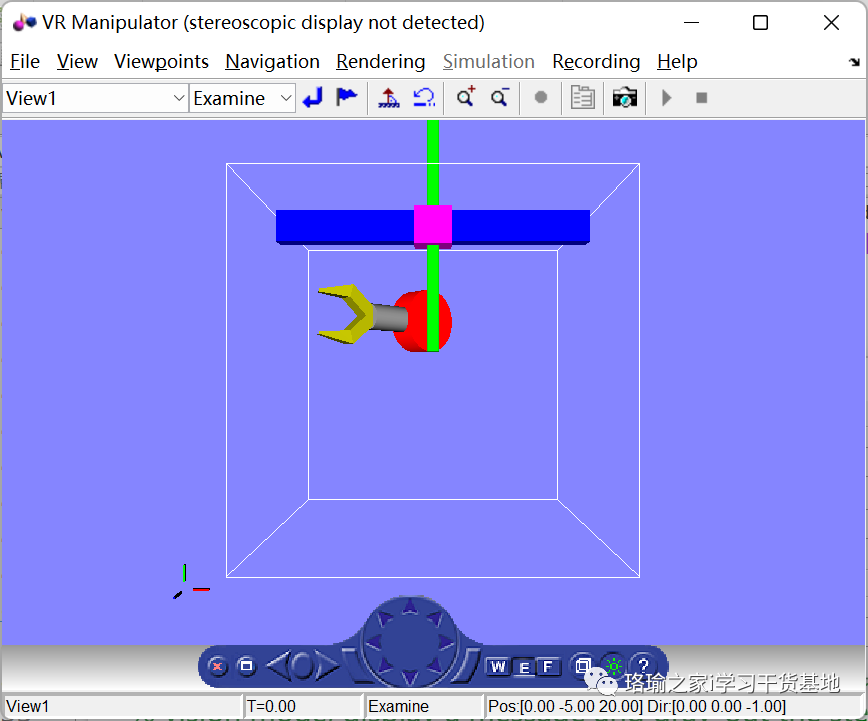
该示例显示了处于主动立体视觉模式的操纵器。它说明了立体渲染属性的效果以及如何使用立体视觉 VRFIGURE 属性。
仅当图形卡支持四缓冲 OpenGL 渲染并由图形卡驱动程序启用时,操纵器才会以活动立体视觉模式显示。请注意,只有当您使用带有主动快门眼镜、自动立体 3D 显示器或类似主动立体视觉技术的 3D 显示器(或 3D 电视机)时,立体视觉效果才会可见。
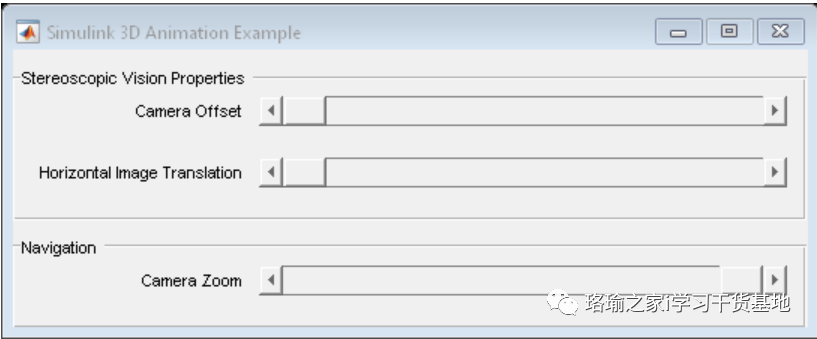
开始示例后,您将看到一个带有三个滑块的控制面板。使用前两个滑块设置立体视觉VRFIGURE属性,即设置Stereo3DCameraOffset和Stereo3DHIT(HIT代表水平图像平移)。使用第三个滑块缩放相机。
我们创建的每个虚拟场景都有最大可用深度,在该深度内可以创建有效的3D效果。通过调整下面的 2 个属性,我们可以在给定的相机变焦(视点视野)设置下调整给定场景的最佳 3D 感知。
Stereo3DCameraOffset 属性定义左右相机(视点)之间轴间距离的一半。通过调整摄像机之间的距离,我们能够动态增加或减少场景的深度。
Stereo3DHIT 属性定义左眼和右眼图像的水平移动,以更改相应点的视差值。通过更改其值,可以更改场景在屏幕上的深度位置。
二、示例
2.1 创建世界对象
我们首先创建一个代表虚拟世界的VRWORLD类对象。
2.2 打开虚拟世界
世界必须先打开,然后才能使用。这是通过 OPEN 命令完成的。
2.3 访问VRML节点
要访问 VRML 节点,必须创建适当的 VRNODE 对象。节点由其名称和所属世界标识。
2.4 使用立体视觉和导航属性面板创建对话框
该对话框用于以交互方式更改刚刚创建的 VRNODE 对象引用的 VRML 节点的字段值。
2.5 尝试在主动立体视觉模式下创建虚拟人物
如果在主动立体视觉模式下创建虚拟图形,则应该可以修改立体视觉属性并通过快门眼镜查看立体视觉3D效果。
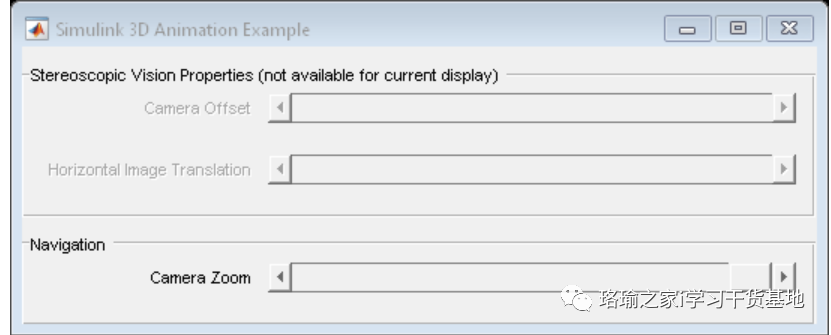
2.6 检查虚拟人物是否处于主动立体视觉模式
如果无法在活动立体视觉模式下创建虚拟图形,则显示一条消息并将立体视觉属性控件灰显。
三、程序
程序下载:https://download.csdn.net/download/weixin_45770896/87666676