【MATLAB图像处理实用案例详解(10)】——基于Kalman滤波的目标跟踪预测红色小球位置

目录
-
- 一、Kalman滤波
- 二、Kalman滤波源程序
- 三、Kalman滤波预测红色小球位置程序实现
一、Kalman滤波
Kalman 滤波算法是一个最优化自回归数据处理算法,对于很多问题的解決,它是最优、效率最高甚至是最有用的。Kalman 滤波的广泛应用己经超过30年,领域包括机器人导航、控制、传感器数据融合以及军事方面的雷达系统、导弹追踪等。近年来 Kalman 滤波被应用于数宇图像处理,例如人脸识别、图像分割、目标跟踪、图像边缘检测等。
首先要引入一个离散控制过程的系统,该系统可用一个线性随机微分方程来描述:
X(k)=AX(k−1)+BU(k)+W(k)X(k)=AX(k-1)+BU(k)+W(k)X(k)=AX(k−1)+BU(k)+W(k)
系统的测量值为:
Z(k)=HX(k)+V(k)Z(k)=HX(k)+V(k)Z(k)=HX(k)+V(k)
上面两个式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。A和B是系统参数,对于多模型系统,它们为矩阵。Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。W(k)和V(k)分别表示过程和测量的噪声。它们被假设成高斯白噪声,其协方差分别是Q和R(这里假设它们不随系统状态变化而变化)。
对于满足上面条件的线性微分系统,Kalman滤波器是最优的闲心处理器。下面用Kalman滤波器来估计系统的最优化输出。
首先利用系统的过程模型来预测下一状态的系统。假设现在的系统状态是k,根据系统的模型,基于系统的上衣状态可以预测出现在状态:
X(k∣k−1)=AX(k−1∣k−1)+BU(k)X(k|k-1)=AX(k-1|k-1)+BU(k)X(k∣k−1)=AX(k−1∣k−1)+BU(k)
上式中,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果,U(k)为现在状态的控制量,如果没有控制量,它可以为0。
到现在为止,系统结果已经更新,可是对应于X(k|k-1)的协方差还没有更新。用P表示协方差。
P(k∣k−1)=AP(k−1∣k−1)A′+QP(k|k-1)=AP(k-1|k-1)A'+QP(k∣k−1)=AP(k−1∣k−1)A′+Q
式中,P(k|k-1)是X(k|k-1)对应的协方差,P(k-1|k-1)是X(k-1|k-1)对应的协方差,A’表示A的转置矩阵,Q是系统过程的协方差。上式就是Kalman滤波器5个公式当中的前两个,也就是对系统的预测。
目前,已有现在状态的预测结果,然后再收集现在状态的测量值,结合预测值和测量值,就可以得到现在状态k的最优化估计值X(k|k):
X(k∣k)=X(k∣k−1)+Kg(k)(Z(k)−HX(k∣k−1))X(k|k)=X(k|k-1)+Kg(k)(Z(k)-HX(k|k-1))X(k∣k)=X(k∣k−1)+Kg(k)(Z(k)−HX(k∣k−1))
上式中,Kg为卡尔曼增益:
Kg(k)=P(k∣k−1)H′/HP(k∣k−1)H′+RKg(k)=P(k|k-1)H'/HP(k|k-1)H'+RKg(k)=P(k∣k−1)H′/HP(k∣k−1)H′+R
为了使Kalman滤波器不断地运行下去直到系统过程结束,还要更新k状态下X(k|k)的协方差:
P(k|k)=(I-Kg(k)H)P(k|k-1)
上式中,I为单位阵,对于单模型单测量,I=1。当系统进入k+1状态时,P(k|k)就是上式中的P(k-1|k-1).这样,算法就可以自回归的运算下去。
上面五个公式就是Kalman滤波的5个基本公式。
二、Kalman滤波源程序
Kalman滤波源程序如下:
%Kalman滤波
clear all
N=800;
w(1)=0;
%系统预测的随机白噪声
w=randn(1,N)
x(1)=0;
a=1;
for k=2:N;
%系统的预测值
x(k)=a*x(k-1)+w(k-1);
end
%测量值的随机白噪声
V=randn(1,N);
q1=std(V);
Rvv=q1.^2;
q2=std(x);
Rxx=q2.^2;
q3=std(w);
Rww=q3.^2;
c=0.2;
%测量值
Y=c*x+V;
p(1)=0;
s(1)=0;
for t=2:N;
%前一时刻X的协方差系数
p1(t)=a.^2*p(t-1)+Rww;
%Kalman增益
b(t)=c*p1(t)/(c.^2*p1(t)+Rvv);
%经过滤波后的信号
s(t)=a*s(t-1)+b(t)*(Y(t)-a*c*s(t-1));
%t状态下x(t|t)的协方差系数
p(t)=p1(t)-c*b(t)*p1(t);
end
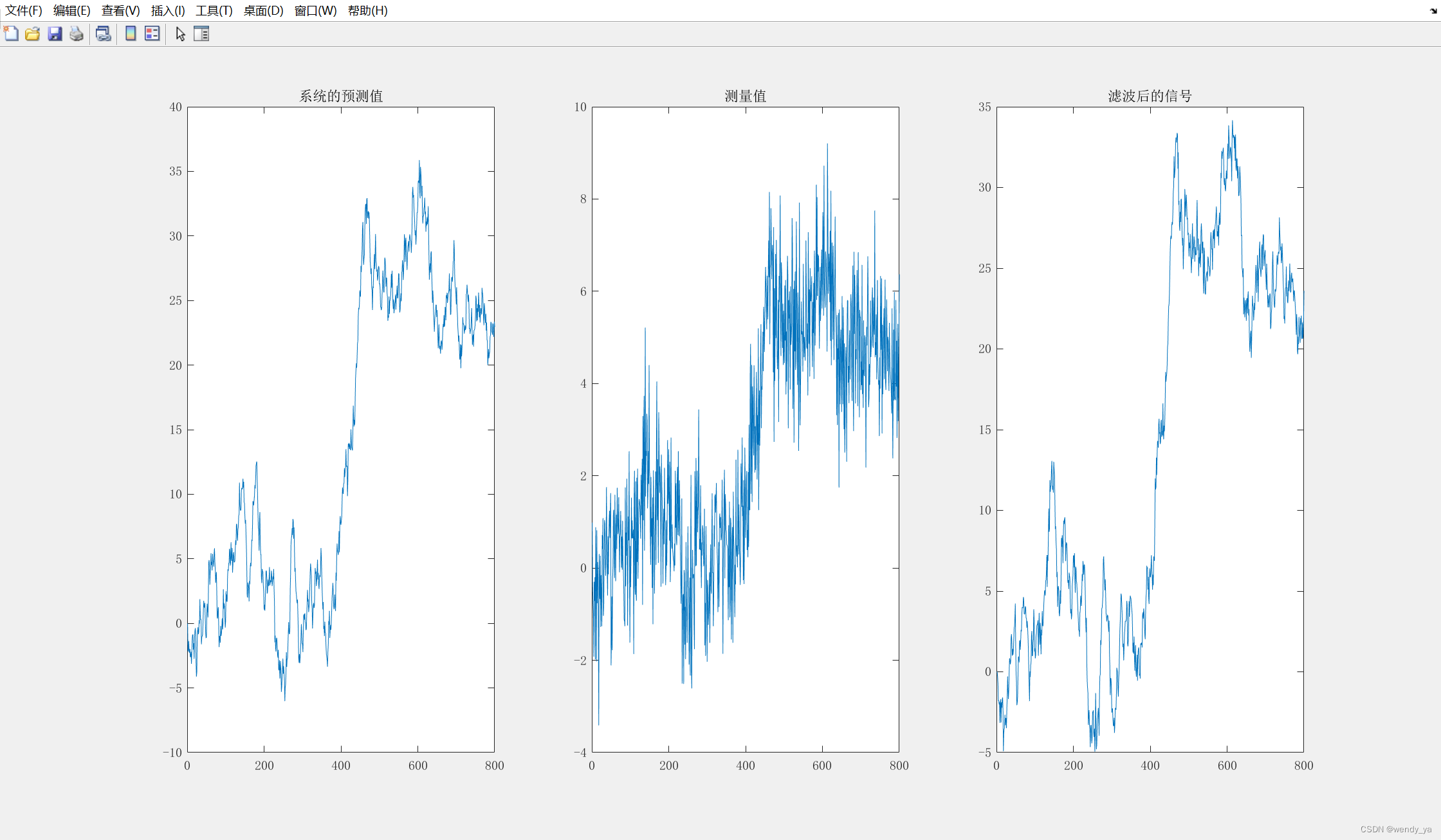
subplot(131)
plot(x)
title('系统的预测值')
subplot(132)
plot(Y)
title('测量值')
subplot(133)
plot(s)
title('滤波后的信号')
运行结果如下:
三、Kalman滤波预测红色小球位置程序实现
Kalman滤波是一种最优化递归处理算法,其具有如下特点:
①Kalman滤波充分利用如下信息估计感兴趣变量当前的取值:系统和测量装置的动态特性;系统噪声、测量误差和动态模型的不确定性的统计描述;感兴趣变量的初始条件的相关信息。
②Kalman滤波不需要保存先前的数据,当进行新的测量时也不需要对原来数据进行处理。
③Kalman滤波算法获得理想滤波效果的前提是,必须已知系统模型以及系统噪声和量测噪声的统计模型。
④Kalman滤波的噪声过程必须为零均值白噪声。
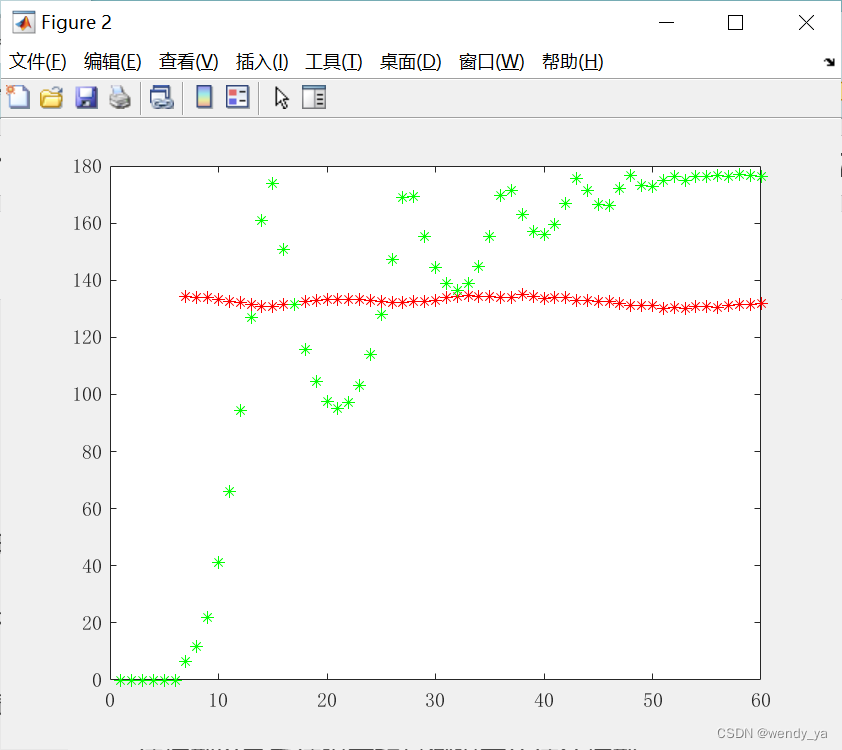
运行结果如下:

球横纵坐标的位置曲线如下:
完整代码参考链接:https://download.csdn.net/download/didi_ya/87692167。
如果对你有所帮助,记得点个赞哟~