偏航角、俯仰角、横滚角的理解

最近研究IMU陀螺仪,经过一早上的调试,最后发现根本看不懂xyz三个角度的度数是怎么来的,看了一些教程,也觉得不够直观,去了b站找了个视频,发现讲解的还不错,顺便也加上自己的一些理解,但是写的可能并不是很直观,但是应该可以提供一点思路。
下面是视频地址: 无人机DIY入门系列教程:(三)姿态解算上:姿态角、欧拉角与旋转矩阵_哔哩哔哩_bilibili
坐标系
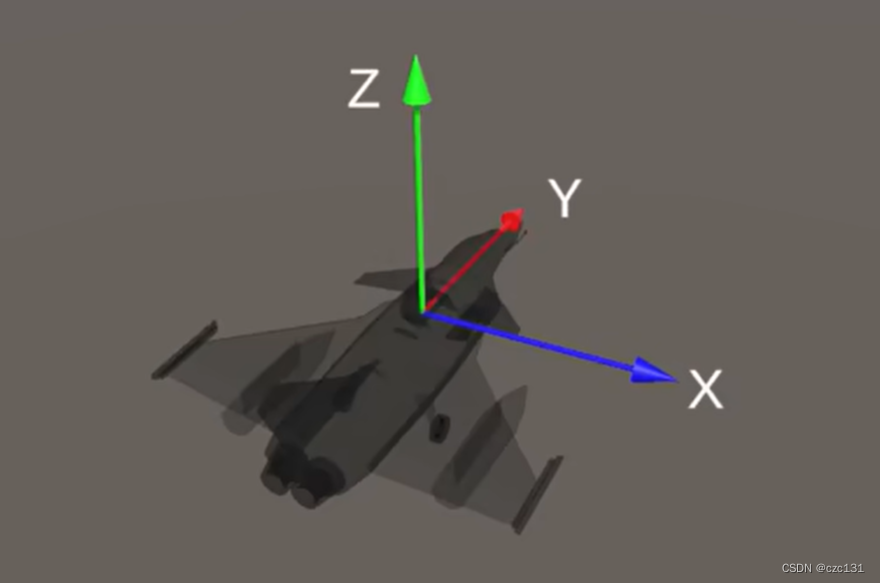
首先是引入机体坐标系和世界坐标系,都是xyz坐标系,下面是一张机体坐标系,实际上我在实验的时候,在三维图画也可以看到这两套坐标系,一套是不变的,应该就类似于世界坐标系,一套时在飞机上跟着飞机一起动的。
一般世界坐标系是东北天(东-x,北-y,上-z),机体坐标系是右前上(下图)
从图像看三种角
首先是俯仰,也就是飞机抬头
然后是航向,也就是类似于汽车在平地上转弯
最后是横滚,也就是飞机颠簸
下面是三种角的引入
为了好理解,假设水平面就是地面
-
偏航角指的是机体y在水平面上的投影与世界y的夹角,也就是y自己在地上的投影和地上标准坐标y轴的夹角
-
俯仰角指的是机体y与水平面的夹角,也就是y自己和地面的夹角
-
横滚角指的是机体z与机体y所在铅垂面的夹角,一条空间中的线可以确定无数个平面,而与地面垂直的那个就作为铅垂面,这个也是线面角
从坐标系来看
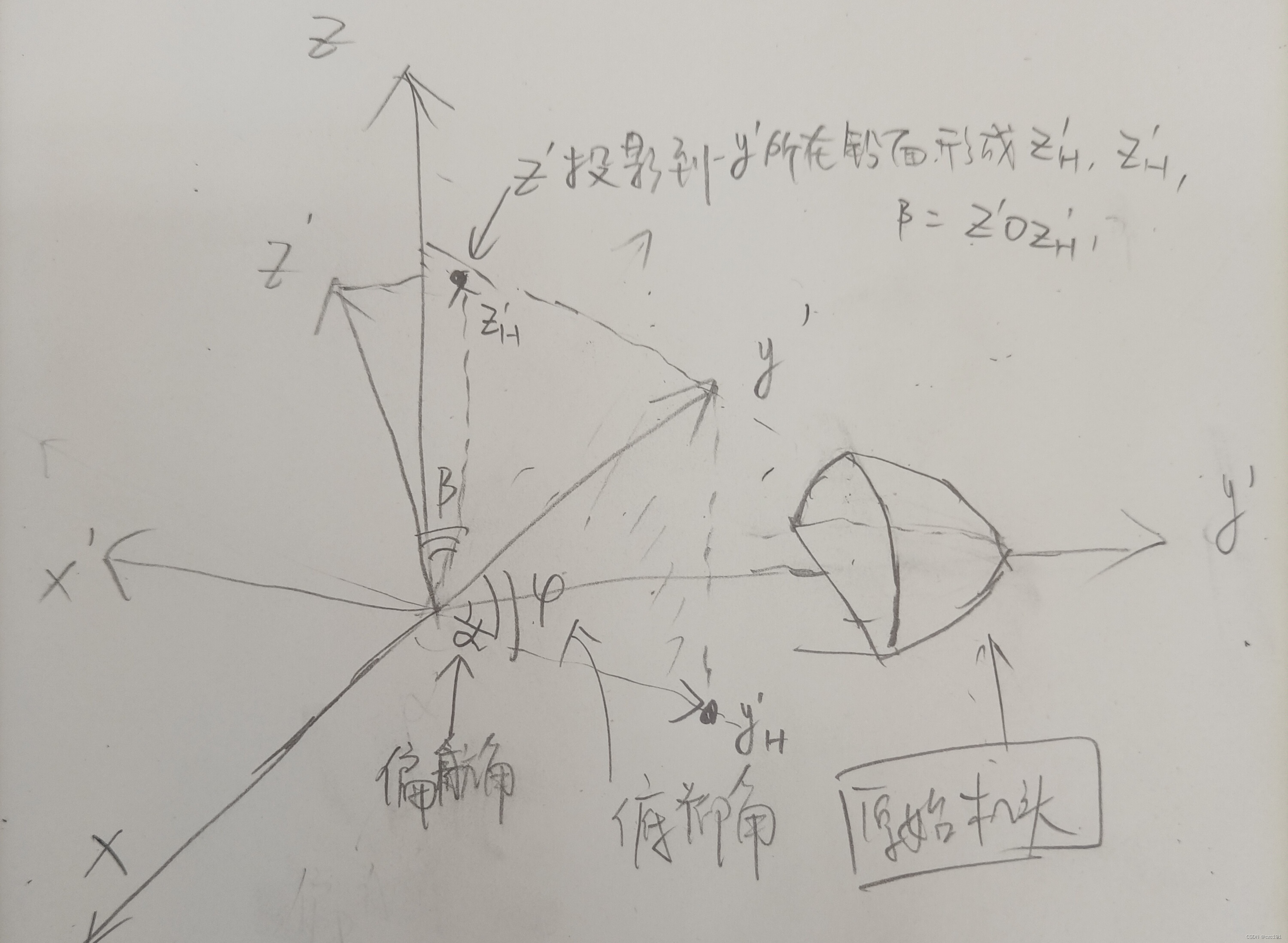
如上图,xyz表示世界坐标系,x'y'z'表示机体坐标系,跟视频的保持一致,机头原始朝向y'位置
其中y'H是y‘在水平面的投影,y'Oy'H构成了y'所在的铅垂面,z'H表示z'在y'所在铅垂面的投影
根据定义:
1. φ是y与水平面的夹角,为俯仰角
2. α是y’在水片面投影与y的夹角,为偏航角
3. β为z'与y'所在铅垂面的夹角,也就是z'Oz'H,为滚转角
如何理解角度
任意飞机的位置都可以表示成上面的几种运动的组合,因此几个角度其实就是在描述标准坐标系如何旋转到当前的机体坐标系,也就是描述飞机如何从一开始转到现在这个状态
偏航角和俯仰角其实好理解,就是机体先偏航(左右旋转就是α),然后抬头(上下旋转是φ),可以想象这个过程,那么如何理解滚转角β?
从几个定义中可以发现,x轴其实是没用的,为了简便我们先抛弃
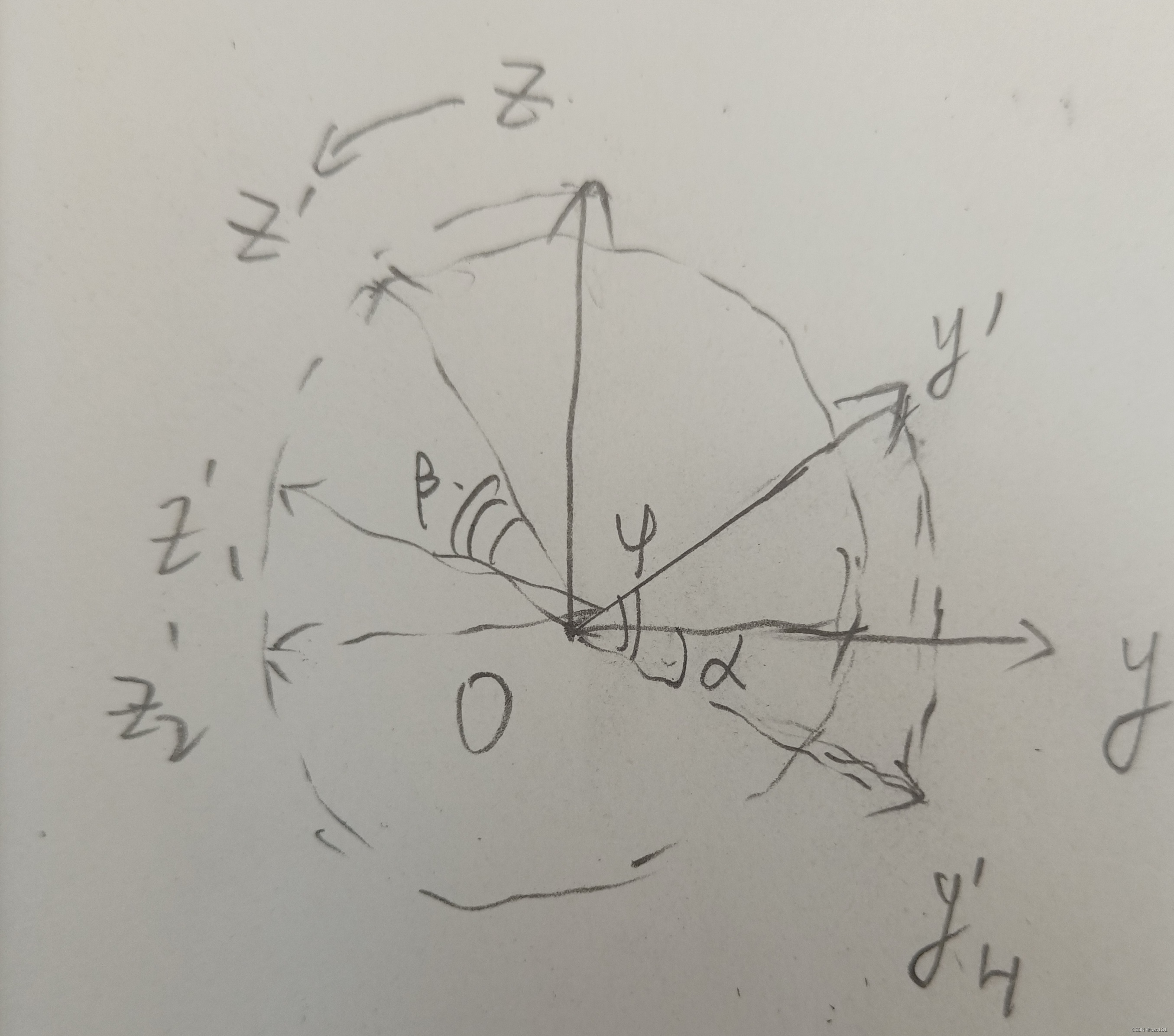
观察上图,xy是初始坐标系(定为世界坐标系,z竖直向上),飞机起初朝向y位置,经过过偏航α到了y'H,此时z轴不变,然后经过俯仰,也就是飞机抬头φ,到了y‘位置,此时的z是会变的,变到了z',相当于就是y'HOz在旋转,转到了y'Oz'
此时飞机头指向y',这时候实际上飞机还是正的,那么滚转实际上描述的就是飞机绕着飞机头所指向的轴y'进行旋转,这时的z'活动范围就是一个与y’垂直,y‘为轴,z’为半径的圆盘,那么如何计算旋转的角度,也就是计算z'1(任意一个旋转到的位置)与z'的夹角,这个角就是β
回过头来,根据前面的定义,β是最终的飞机z与飞机y所在铅锤平面上的投影所成角度,这里的z'实际上等于与前面整体图的z'H,也就是最终z(z'1,z'2....任意旋转)在平面上的投影,因为z'是与y'Oz共面的,而zoy‘就是铅垂面(默认初始z竖直向上),也就是y’所在铅垂面,而z'1是由y'Oz'旋转得到(绕机体所在轴旋转),显然投影也就是z',这里说法可能不太科学,但是感觉一下也差不多。
那z'相当于前面的z‘H,那么最终机体z也就是z1'和z'的夹角自然就是β了,这也就描述了飞机绕着轴转,也就是横滚。