【ROS参数服务器增删改c++操作3】

在plumbing_param_server下面的src新建文件
命名demo03__param_del.cpp
编辑cmakelist.txt
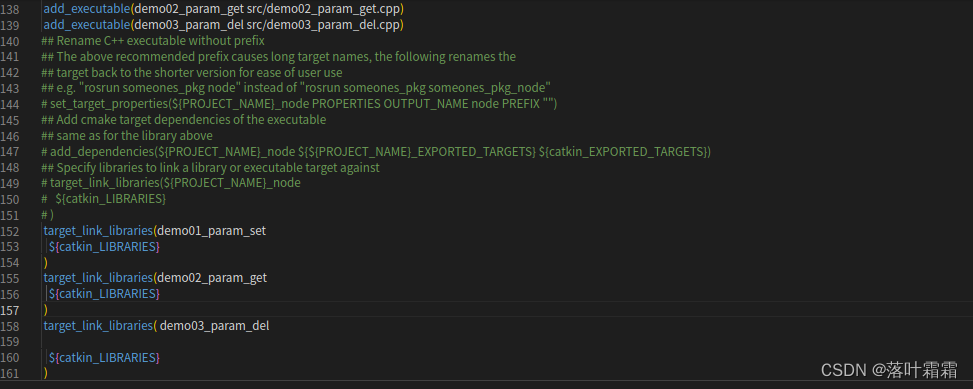
演示参数删除:实现:
ros : :NodeHandle----------deleteparam( )
#include "ros/ros.h"
int main(int argc, char argv){
setlocale(LC_ALL,"");
ros::init(argc ,argv, "param_del_c" );
ros::NodeHandle nh;
//删除: NodeHandle-------------
bool flag1 = nh.deleteParam ( "radius" );
if (flag1)
{
ROS_INFO("删除成功!");
}else {
ROS_INFO("删除失败!");
}
return 0;}
完毕之后ctrl+shift+b进行编译。
然后ctrl+alt+t打开终端,
输入roscore启动ros。
然后新开两个终端,分别运行以下:
rosrun plumbing_param_server demo01_param_set
rosrun plumbing_param_server demo03_param_del
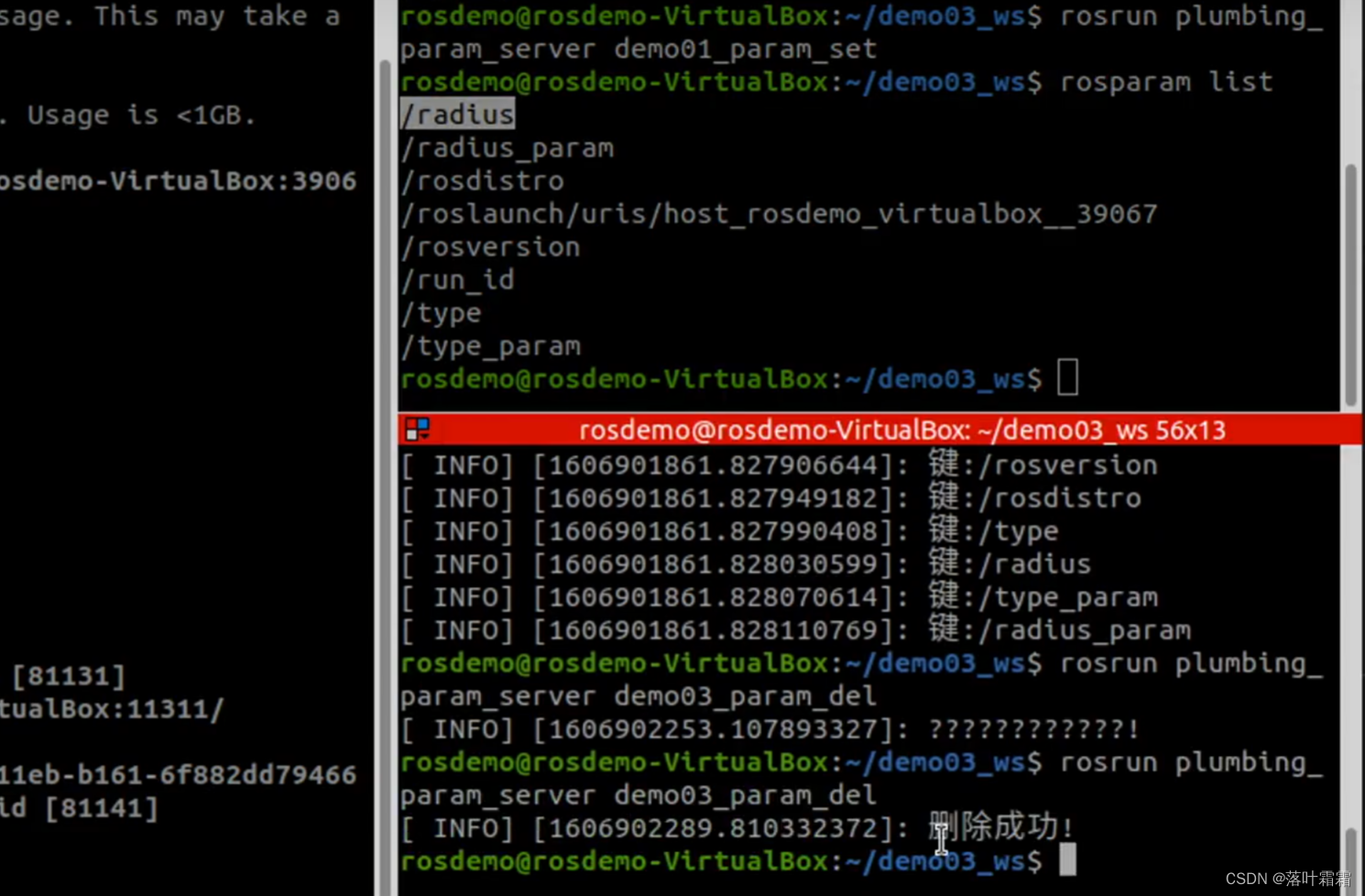
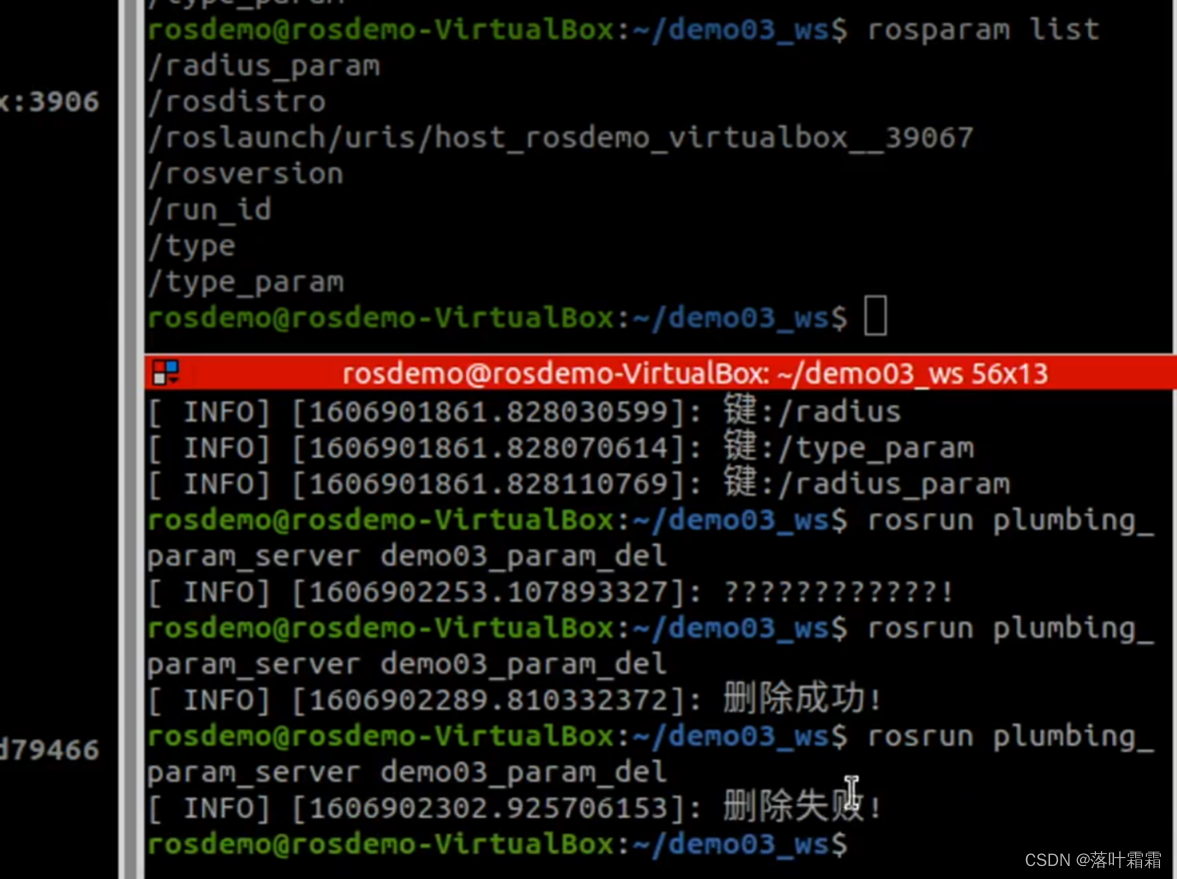
继续删除就会删除失败:
ros: :paramI-----------------------del()
加入以下代码:
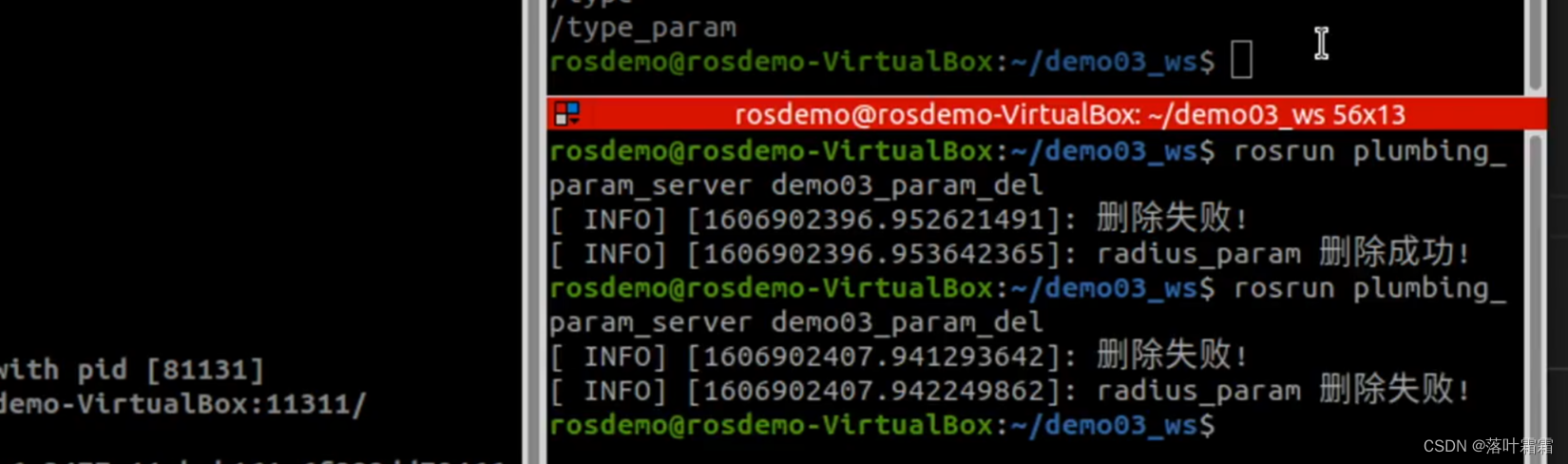
bool flag2 = ros::param::del( "radius_param" );
if (flag2)
{
ROS_INFO( "radius_param删除成功! ");
}else{
ROS_INFO ( " radius_param删除失败! ");
}
运行结果:
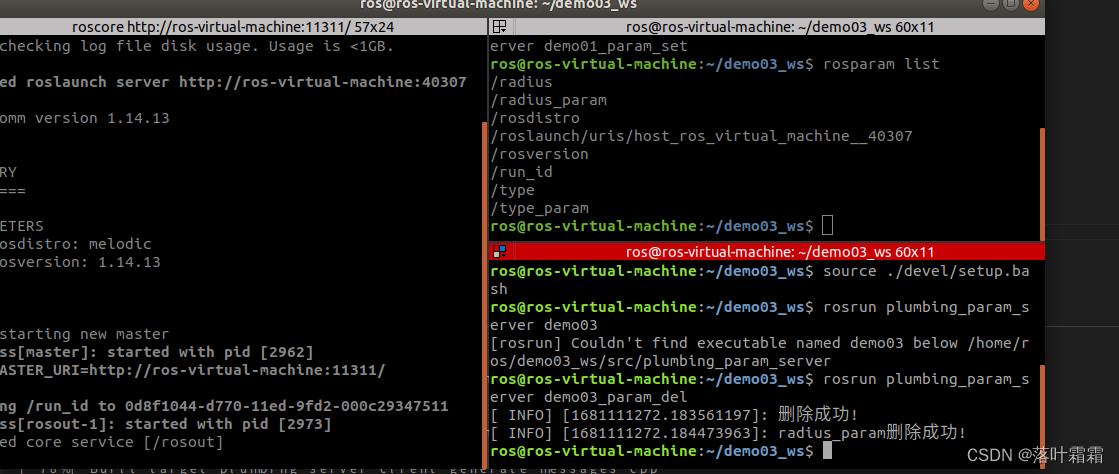
再次执行,删除失败。