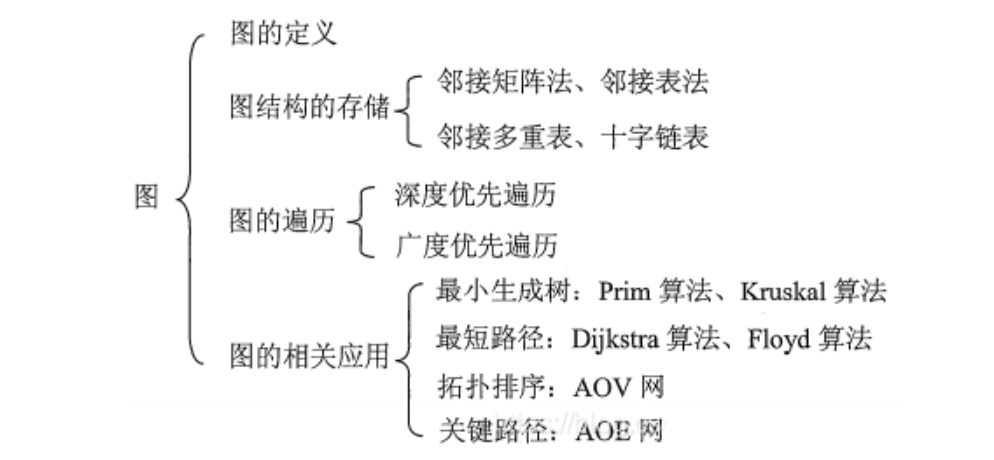
图

文章目录
- 一、图
-
- 1.1、图的定义
- 1.2、图的基本概念和术语
- 1.3、图的存储结构
-
- 1.3.1、邻接矩阵
- 1.3.2、邻接表
- 1.3.3、十字链表
- 1.3.4、邻接多重表
- 1.3.5、边集数组
- 1.4、图的遍历
-
- 1.4.1、深度优先遍历(DFS)
- 1.4.2、广度优先遍历(BFS)
一、图
在线性表中,数据元素之间是被串起来的,仅有线性关系,每个数据元素只有一个直接前驱和一个直接后继。
在树形结构中,数据元素之间有着明显的层次关系,并且每一层上的数据元素可能和下一层中多个元素相关,但只能和上一层中一个元素相关。
图是一种较线性表和树更加复杂的数据结构。在图形结构中,结点之间的关系可以是任意的,图中任意两个数据元素之间都可能相关。
1.1、图的定义
图(Graph)是由顶点的有穷非空集合V ( G )和顶点之间边的集合E ( G )组成,通常表示为: G = ( V , E ) ;
- G 表示个图;
- V 是图G中顶点的集合;
- E是图G中边的集合;
V = { v 1 , v 2 , . . . , v n },则用∣ V ∣表示图G中顶点的个数,也称图G 的阶;E = { ( u , v ) ∣ u ∈ V , v ∈ V },用∣ E ∣表示图G中边的条数。
注意: 线性表可以是空表,树可以是空树,但图不可以是空图。就是说,图中不能一个顶点也没有,图的顶点集V一定非空,但边集E可以为空,此时图中只有顶点而没有边。
1.2、图的基本概念和术语
1、有向图
- 若E是有向边(也称弧)的有限集合时,则图G为有向图
- 弧是顶点的有序对,记为<v, w>,其中v,w是顶点;
- v称为弧尾,w称为弧头,<v,w>称为从顶点v到顶点w的弧,也称v邻接到w,或w邻接自v;
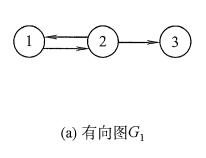
有向图G1可以如下表示:
G1 = (v1, E1)
V1 = {1, 2, 3}
E1 = {<1, 2>, <2, 1>, <2, 3>}
2、无向图
- 若E是无向边(简称边)的有限集合时,则图G为无向图;
- 边是顶点的无序对,记为(v, w)或(w,v),因为(v,w)=(w,v), 其中v,w是顶点;
- 可以说顶点w和顶点v互为邻接点;
- 边(v, w)依附于顶点w和v,或者说边(v, w)和顶点v, w相关联;
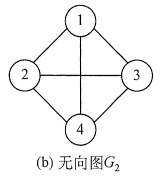
无向图G2可以如下表示:
G2 = (v2, E2)
V2 = {1, 2, 3, 4}
E2 = {<1, 2>, <1, 3>, <1, 4>, <2, 3>, <2, 4>, ❤️, 4>}
3、简单图
一个图G若满足:
- 不存在重复边;
- 不存在顶点到自身的边;
则称图G GG为简单图,上图中G1 和G~2`均为简单图。数据结构中仅讨论简单图。
4、多重图
若图G中某两个结点之间的边数多于一条,又允许顶点通过同一条边和自己关联,则G为多重图。多重图的定义和简单图是相对的。
5、完全图(也称为简单完全图)
- 对于无向图,
|E|的取值范围为0 ~ n(n-1)/2,有n(n-1)/2条边的无向图称为完全图,在完全图中任意两个顶点之间都存在边; - 对于有向图,
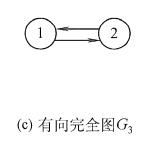
|E|的取值范围为0 ~ n(n-1),有n(n-1)条弧的有向图称为有向完全图,在有向完全图中任意两个顶点之间都存在方向相反的两条弧;
上面的G2是无向完全图,下面的G3是有向完全图;
6、子图
设有两个图G = ( V , E ) 和G ′ = ( V ′ , E ′ ) , 若V ′是V的子集,且E ′ 是E的子集,则称G ′ 是G的子图。若有满足V ( G ′ ) = V ( G ) 的子图G ′ ,则称其为G的生成子图。上图中G 3 为G 1 的子图。
注意:并非V和E的任何子集都能构成G的子图,因为这样的子集可能不是图,即E的子集中的某些边关联的顶点可能不在这个V的子集中。
7、连通、连通图和连通分量
- 在无向图中,若从顶点v到顶点w有路径存在,则称v和w是连通的;
- 若图G中任意两个顶点都是连通的,则称图G为连通图,否则称为非连通图;
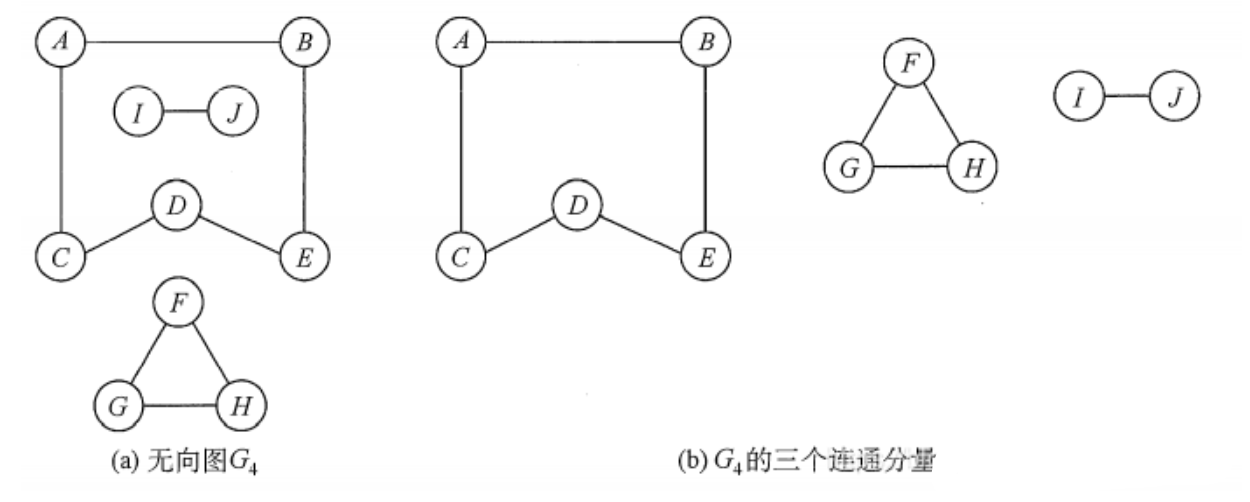
- 无向图中的极大连通子图称为连通分量;
- 若一个图有n个顶点,并且边数小于n − 1 ,则此图必是非连通图;
如下图(a)所示, 图G4有3个连通分量,如图(b)所示:
8、强连通图、强连通分量
- 在有向图中,若从顶点v到顶点w和从顶点w到项点v之间都有路径,则称这两个顶点是强连通的;
- 若图中任何一对顶点都是强连通的,则称此图为强连通图;
- 有向图中的极大强连通子图称为有向图的强连通分量;
注意:强连通图、强连通分量只是针对有向图而言的。一般在无向图中讨论连通性,在有向图中考虑强连通性。
9、生成树、生成森林
- 连通图的生成树是包含图中全部顶点的一个极小连通子图;
- 若图中顶点数为n,则它的生成树含有n − 1条边;
- 对生成树而言,若砍去它的一条边,则会变成非连通图,若加上一条边则会形成一个回路;
- 在非连通图中,连通分量的生成树构成了非连通图的生成森林;
图G2的一个生成树,如下图所示:
10、顶点的度、入度和出度
- 图中每个顶点的度定义:以该顶点为一个端点的边的数目;
- 对于无向图,无向图的全部顶点的度之和等于边数的2倍,因为每条边和两个顶点相关联;
- 对于有向图,顶点v的度分为入度和出度,入度是以顶点v为终点的有向边的数目,而出度是以顶点v为起点的有向边的数目,顶点v的度等于其入度和出度之和;
- 有向图的全部顶点的入度之和与出度之和相等,并且等于边数,这是因为每条有向边都有一个起点和终点;
11、边的权和网
在一个图中,每条边都可以标上具有某种含义的数值,该数值称为该边的权值。这种边上带有权值的图称为带权图,也称网。
12、稠密图、稀疏图
边数很少的图称为稀疏图,反之称为稠密图。稀疏和稠密本身是模糊的概念,稀疏图和稠密图常常是相对而言的。一般当图G满足∣E∣ < ∣V∣log∣V∣时,可以将G视为稀疏图。
13、路径、路径长度和回路
- 顶点Vp到Vq之间的一条路径,是指顶点序列;
- 路径上边的数目称为路径长度;
- 第一个顶点和最后一个顶点相同的路径称为回路或环;
- 若有一个图有n个顶点,并且有大于n-1条边,则此图一定有环;
14、简单路径、简单回路
- 在路径序列中,顶点不重复出现的路径称为简单路径;
- 除第一个顶点和最后一个顶点外,其余顶点不重复出现的回路称为简单回路;
15、距离
- 从顶点u出发到顶点v的最短路径若存在,则此路径的长度称为从u到v的距离;
- 若从u到v根本不存在路径,则记该距离为无穷( ∞ ) ;
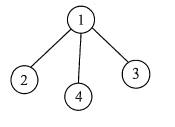
16、有向树
- 一个顶点的入度为0、其余顶点的入度均为1的有向图,称为有向树
1.3、图的存储结构
由于图的结构比较复杂,任意两个顶点之间都可能存在联系,因此无法以数据元素在内存中的物理位置来表示元素之间的关系,也就是说,图不可能用简单的顺序存储结构来表示。而多重链表的方式,要么会造成很多存储单元的浪费,要么又带来操作的不便。因此,对于图来说,如何对它实现物理存储是个难题,接下来我们介绍五种不同的存储结构:
1.3.1、邻接矩阵
图的邻接矩阵存储方式是用两个数组来表示图:一个一维数组存储图中顶点信息,一个二维数组(称为邻接矩阵)存储图中的边或弧的信息。
设G有n个顶点,则邻接矩阵A是一个n*n的方阵,定义为:

下图是一个无向图和它的邻接矩阵:
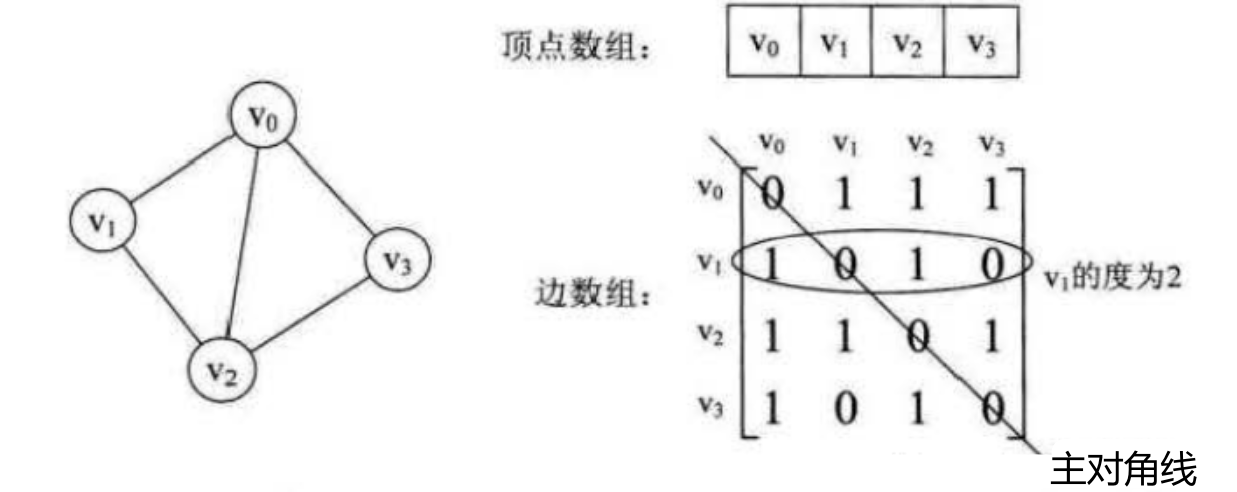
- 无向图的邻接矩阵一定是一个对称矩阵(即从矩阵的左上角到右下角的主对角线为轴,右上角的元与左下角相对应的元全都是相等的),因此,在实际存储邻接矩阵时只需存储上(或下)三角矩阵的元素;
- 对于无向图,邻接矩阵的第i行(或第i列)非零元素(或非∞元素)的个数正好是第i个顶点的度,例如V1的度就是1+0+1+0=2;
- 求顶点Vi的邻接点就是将矩阵中第i行元素扫描一遍,
A[i][j]为1就是邻接点;
下图是有向图和它的邻接矩阵:
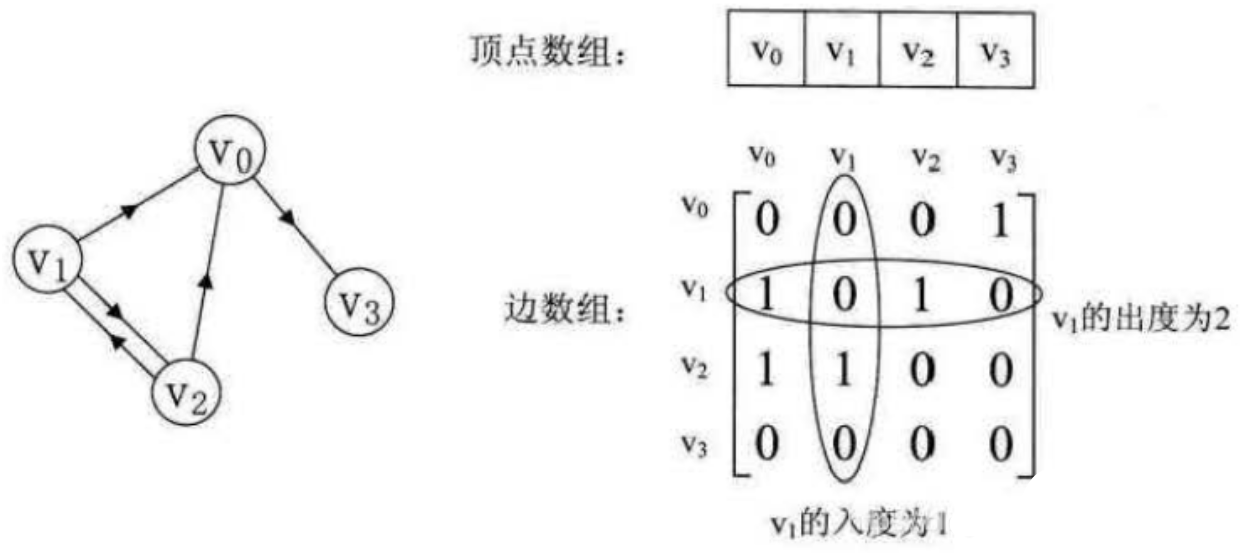
- 主对角线上的数值依然为0,但因为是有向图,所以此矩阵并不对称;
- 有向图讲究入度与出度,顶点v1 的入度为1,正好是第v1 列各数之和。顶点v1的出度为2,即第v1行的各数之和;
- 与无向图同样的办法,判断顶点vi到vj是否存在弧,只需要查找矩阵中
A[i][j]是否为1即可;
下图是有向网图和它的邻接矩阵:
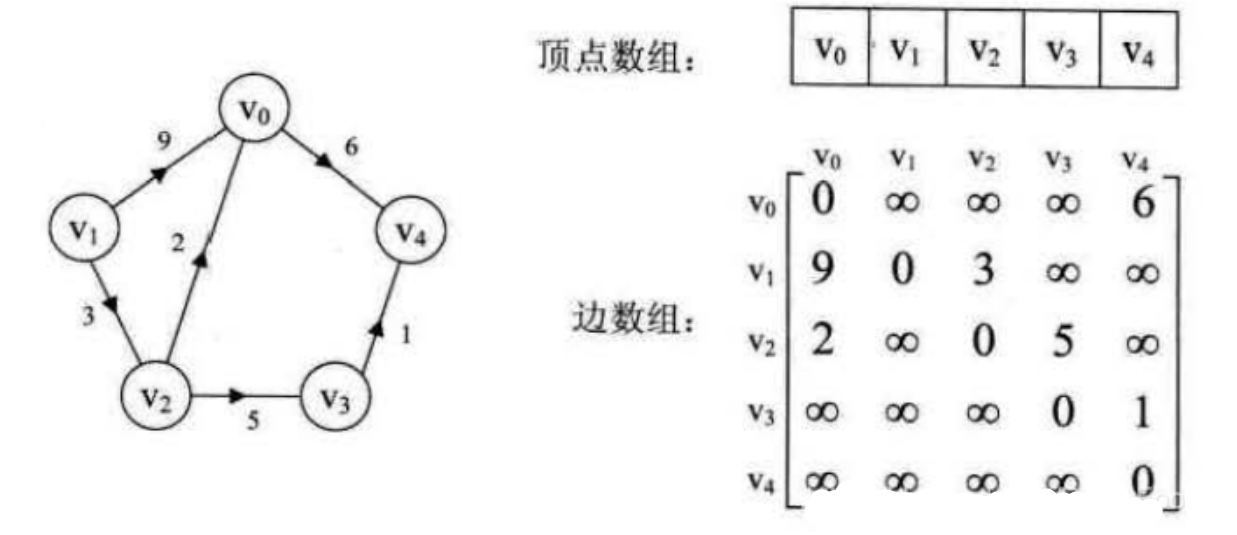
通过以上对无向图、有向图和网的描述,可定义出邻接矩阵的存储结构:
#define MaxVertexNum 100 //顶点数目的最大值
typedef char VertexType; //顶点的数据类型
typedef int EdgeType; //带权图中边上权值的数据类型
typedef struct{VertexType Vex[MaxVertexNum]; //顶点表EdgeType Edge[MaxVertexNum][MaxVertexNum]; //邻接矩阵,边表int vexnum, arcnum; //图的当前顶点数和弧树
}MGraph;注意:
① 在简单应用中,可直接使用二维数组作为图的邻接矩阵(顶点信息等均可省略);
② 当邻接矩阵中的元素仅表示相应的边是否存在时,EdgeType可定义为值为0和1的枚举类型;
③ 无向图的邻接矩阵是对称矩阵,对规模特大的邻接矩阵可以采用压缩存储;
④ 邻接矩阵表示法的空间复杂度为0(n2),其中n为图的顶点数|V|;
⑤ 用邻接矩阵存储图,很容易确定图中任意两个顶点之间是否有边相连。但是,要确定图中有多少边,则必须按行、按列对每个元素进行检测,所花费的时间代价很大;
⑥ 稠密图适合使用邻接矩阵的存储表示;
1.3.2、邻接表
当一个图为稀疏图时(边数相对顶点较少),使用邻接矩阵法显然要浪费大量的存储空间,如下图所示:
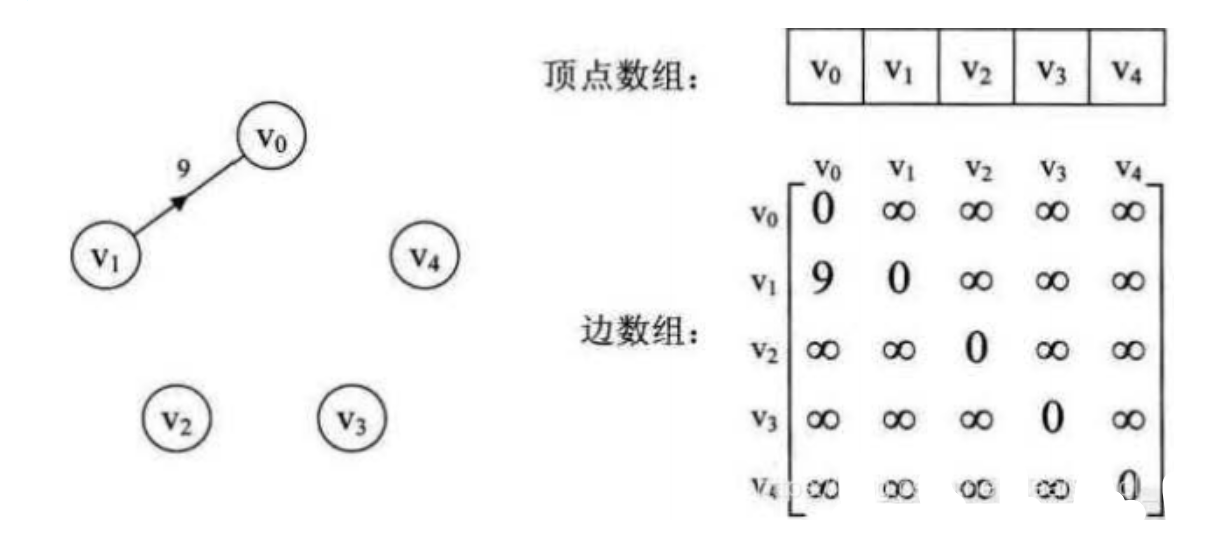
而图的邻接表法结合了顺序存储和链式存储方法,大大减少了这种不必要的浪费;
邻接表:是指对图G中的每个顶点Vi建立一个单链表,第i个单链表中的结点表示依附于顶点Vi的边(对于有向图则是以顶点Vi为尾的弧),这个单链表就成为顶点Vi的边表(对于有向图则称为出边表)。
边表的头指针和顶点的数据信息采用顺序存储(称为顶点表),所以在邻接表中存在两种结点:顶点表结点和边表结点,如下图示:

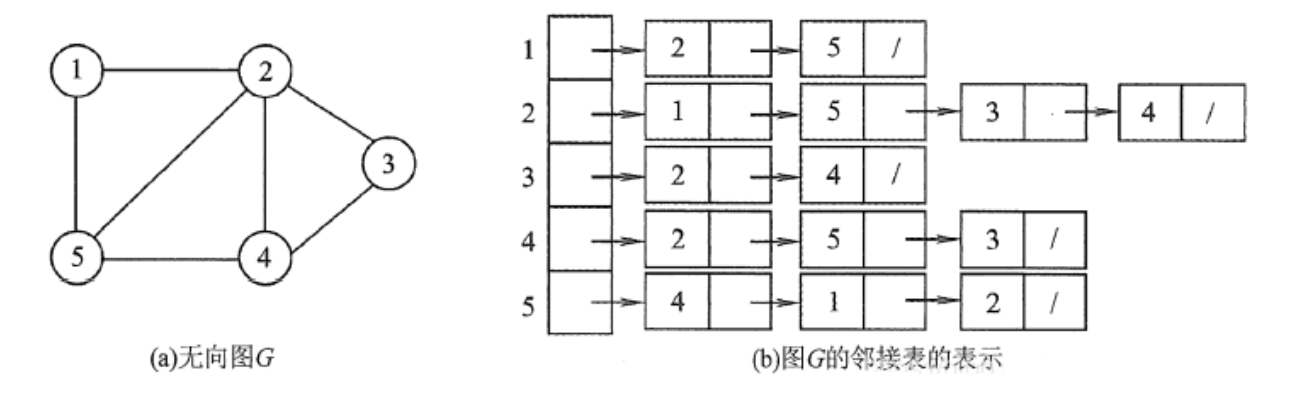
无向图的邻接表的实例,如下图所示:
有向图的邻接表的实例,如下图所示:
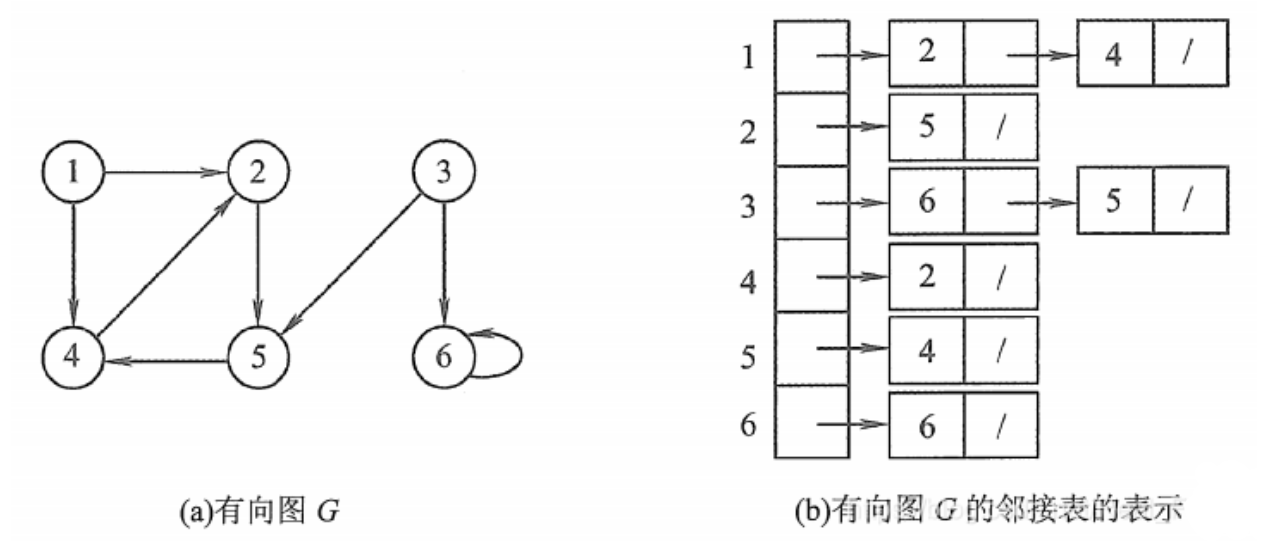
此时我们很容易就可以算出某个顶点的入度或出度是多少,判断两顶点是否存在弧也很容易实现。
对于带权值的网图,可以在边表结点定义中再增加一个weight的数据域,存储权值信息即可。
图的邻接表存储结构,定义如下:
#define MAXVEX 100 //图中顶点数目的最大值
type char VertexType; //顶点类型应由用户定义
typedef int EdgeType; //边上的权值类型应由用户定义
/*边表结点*/
typedef struct EdgeNode{int adjvex; //该弧所指向的顶点的下标或者位置EdgeType weight; //权值,对于非网图可以不需要struct EdgeNode *next; //指向下一个邻接点
}EdgeNode;/*顶点表结点*/
typedef struct VertexNode{Vertex data; //顶点域,存储顶点信息EdgeNode *firstedge //边表头指针
}VertexNode, AdjList[MAXVEX];/*邻接表*/
typedef struct{AdjList adjList;int numVertexes, numEdges; //图中当前顶点数和边数
}图的邻接表存储方法具有以下特点:
- 若G为无向图,则所需的存储空间为0(|V| + 2|E|);若G为有向图,则所需的存储空间为0(|V| + |E|);谴谪的倍数2是因为,无向图中每条边在链接表中出现了两次;
- 对于稀疏图,采用邻接表表示将极大地节省存储空间;
- 在邻接表中,给定一顶点,能很容易地找出它的所有邻边,因为只需要读取它的邻接表;在邻接矩阵中,相同的操作则需要扫描一行,花费的时间为O(n)。但是,若要确定给定的两个顶点间是否存在边,则在邻接矩阵中可以立刻查到,而在邻接表中则需要在相应结点对应的边表中查找另一结点,效率较低;
- 在有向图的邻接表表示中,求一个给定顶点的出度只需计算其邻接表中的结点个数;但求其顶点的入度则需要遍历全部的邻接表。因此,也有人采用逆邻接表的存储方式来加速求解给定顶点的入度。当然,这实际上与邻接表存储方式是类似的;
- 图的邻接表表示并不唯一,因为在每个顶点对应的单链表中,各边结点的链接次序可以是任意的,它取决于建立邻接表的算法及边的输入次序;
1.3.3、十字链表
十字链表是有向图的一种链式存储结构。对于有向图来说,邻接表是有缺陷的。关心了出度问题,想了解入度就必须要遍历整个图才能知道,反之,逆邻接表解决了入度却不了解出度的情况。有没有可能把邻接表与逆邻接表结合起来呢?答案是肯定的,就是把它们整合在一起。这就是我们现在要介绍的有向图的一种存储方法:十字链表(Orthogonal List)。
我们重新定义顶点表结点结构,如下表所示:

- firstin:表示入边表头指针,指向该顶点的入边表中第一个结点;
- firstout :表示出边表头指针,指向该顶点的出边表中的第一个结点;
重新定义的边表结点结构,如下表所示:

- tailvex :是指弧起点在顶点表的下标;
- headvex :是指弧终点在顶点表中的下标;
- headlink:是指入边表指针域,指向终点相同的下一条边;
- taillink:是指边表指针域,指向起点相同的下一条边;
- 如果是网,还可以再增加一个weight域来存储权值;
接下来通过一个例子详细介绍十字链表的结构:
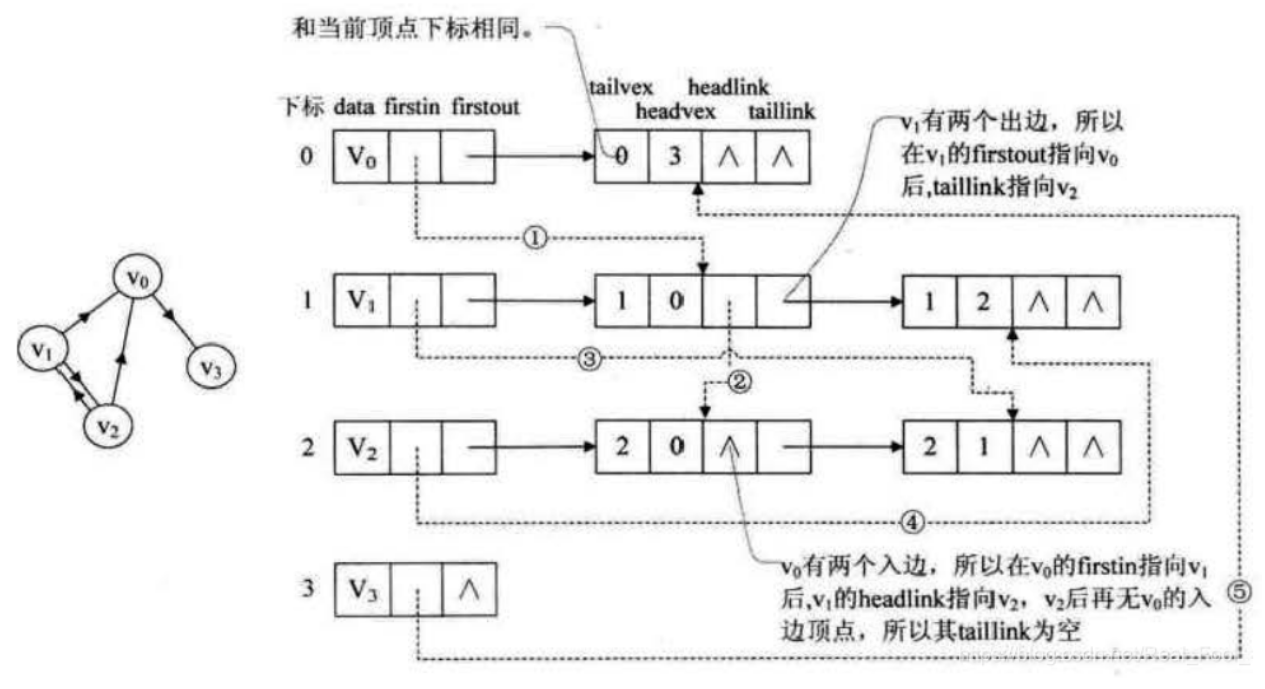
如上图示,顶点依然是存入一个一维数组{V~0`, V1, V2, V3},实线箭头指针的图示完全与邻接表的结构相同;
就顶点V0而言,firstout 指向的是出边表中的第一个结点V3,所以V0边表结点的headvex=3,而tailvex就是当前顶点V0的下标0,;由于V0只有一个出边顶点,所以headlink和taillink都是空;
我们重点需要来解释虚线箭头的含义,它其实就是此图的逆邻接表的表示。
- 对于V0来说,它有两个顶点V1和V2的入边,因此V0的firstin指向顶点V1的边表结点中headvex为0的结点(①);
- 接着由入边节点的headlink指向下一个入边顶点V2(②);
- 对于顶点V1,它有一个入边顶点V2,所以它的firstin指向顶点V2的边表结点中headvex为1的结点(③);
- 顶点V2和V3也是同样有一个入边顶点(④和⑤);
十字链表的好处就是因为把邻接表和逆邻接表整合在了一起,这样既容易找到以V1为尾的弧,也容易找到以V1为头的弧,因而容易求得顶点的出度和入度。而且它除了结构复杂一点外,其实创建图算法的时间复杂度是和邻接表相同的,因此,在有向图的应用中,十字链表是非常好的数据结构模型。
1.3.4、邻接多重表
邻接多重表是无向图的另一种链式存储结构
在邻接表中,容易求得顶点和边的各种信息,但在邻接表中求两个顶点之间是否存在边而对边执行删除等操作时,需要分别在两个顶点的边表中遍历,效率较低。比如下图中,若要删除左图的( V0 , V2 ) 这条边,需要对邻接表结构中右边表的红框两个结点进行删除操作,显然这是比较烦琐的。
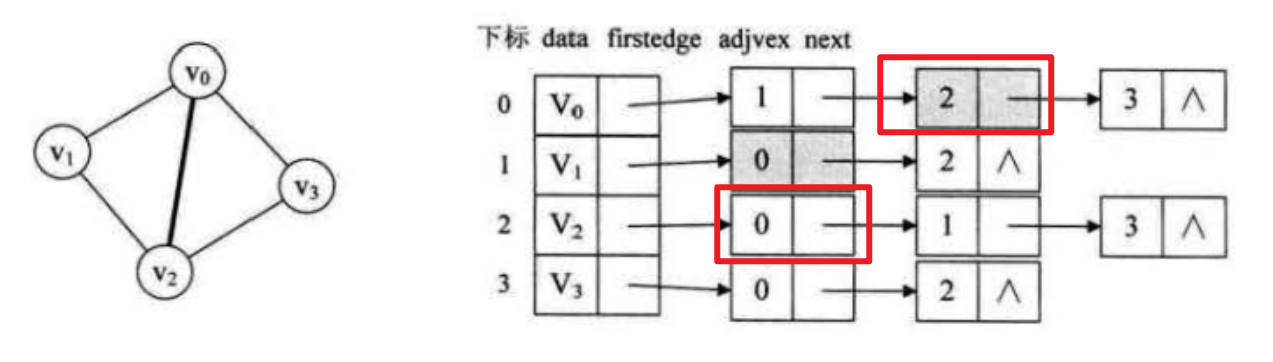
重新定义的边表结点结构,如下表所示:

- ivex和jvex:是与某条边依附的两个顶点在顶点表中下标;
- ilink 指向依附顶点ivex的下一条边,jlink 指向依附顶点jvex的下一条边;
每个顶点也用一一个结点表示,它由如下所示的两个域组成:

- data :存储该顶点的相关信息;
- firstedge:指示第一条依附于该顶点的边;
举例:左图告诉我们它有4个顶点和5条边,显然,我们就应该先将4个顶点和5条边的边表结点画出来。
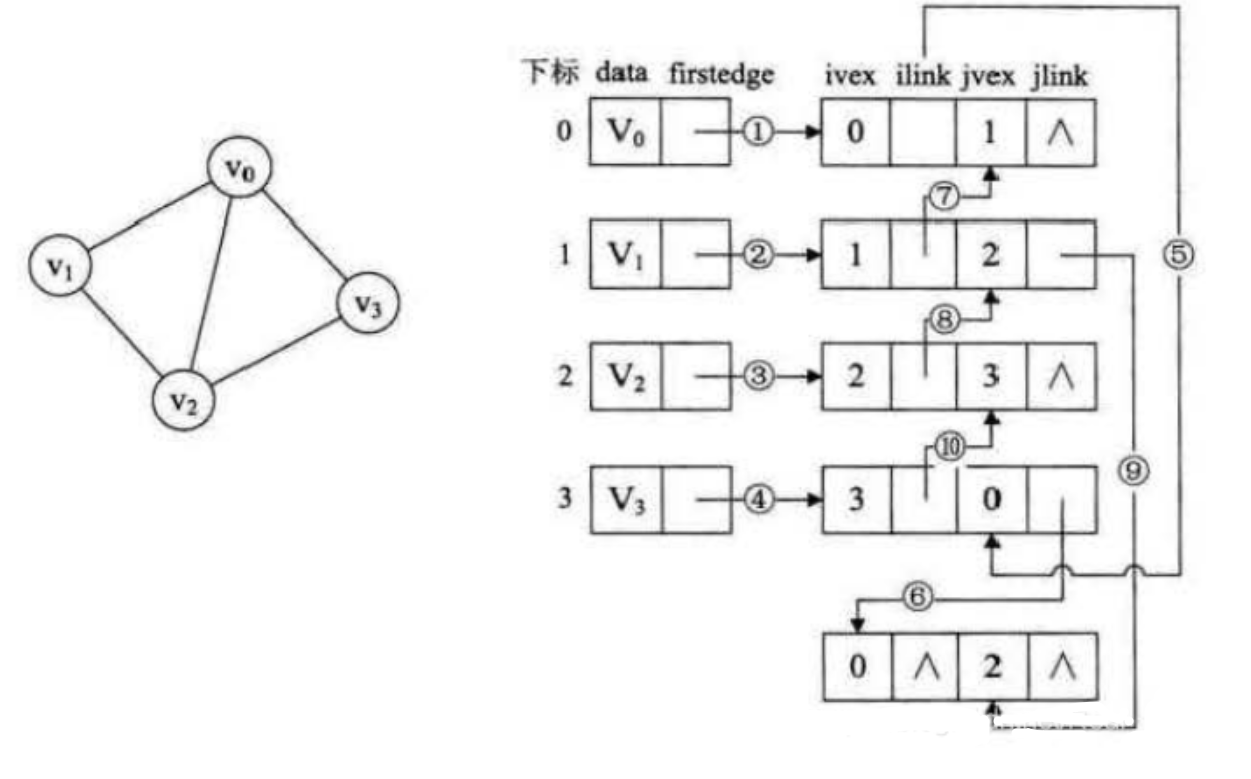
- 首先连线的①②③④就是将顶点的firstedge指向一条边,顶点下标要与ivex的值相同;
- 由于顶点V0的( V0 , V1 ) 边的邻边有( V0 , V3 )和( V0 , V2 ) 。 因此⑤⑥的连线就是满足指向下一条依附于顶点V0的边的目标;
- 注意:ilink指向的结点的jvex一定要和它本身的ivex的值相同;
- 连线⑦就是指( V1 , V0 ) 这条边,它是相当于顶点V1指向( V1 , V2 ) 边后的下一条;
- V2有三条边依附,所以在③之后就有了⑧⑨;
- 连线④的就是顶点V3在连线④之后的下一条边;
- 左图一共有5条边,所以右图有10条连线,完全符合预期
到这里,可以明显的看出,邻接多重表与邻接表的差别,仅仅是在于同一条边在邻接表中用两个结点表示,而在邻接多重表中只有一个结点。 这样对边的操作就方便多了,若要删除左图的( V0 , V2 ) 这条边,只需要将右图的⑥⑨的链接指向改为NULL即可。
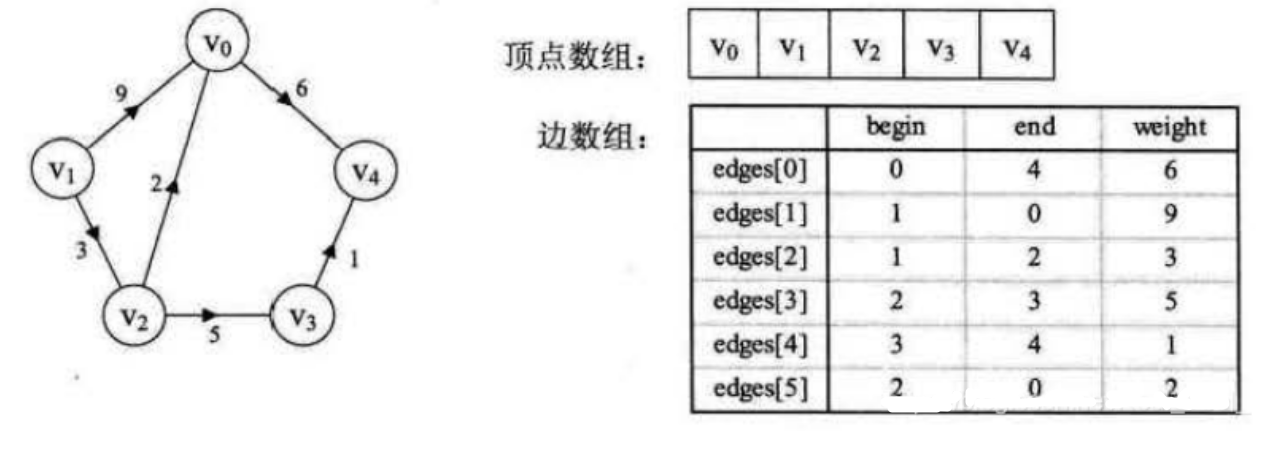
1.3.5、边集数组
边集数组是由两个一维数组构成:一个是存储顶点的信息(顶点数组);另一个是存储边的信息(边数组);
这个边数组每个数据元素由一条边的起点下标(begin)、 终点下标(end)和权(weight)组成,如下图所示。显然边集数组关注的是边的集合,在边集数组中要查找一个顶点的度需要扫描整个边数组,效率并不高。因此它更适合对边依次进行处理的操作,而不适合对顶点相关的操作。
1.4、图的遍历
图的遍历是和树的遍历类似,我们希望从图中某一顶点出发访遍图中其余顶点,且使每一个顶点仅被访问一次, 这一过程就叫做图的遍历(Traversing Graph)。
对于图的遍历来,通常有两种遍历次序方案:它们是深度优先遍历和广度优先遍历;
1.4.1、深度优先遍历(DFS)
① DFS算法
如其名称中所暗含的意思一样,这种搜索算法所遵循的搜索策略是尽可能“深”地搜索一个图。它的基本思想如下:
首先访问图中某一起始顶点v,然后由v出发,访问与v邻接且未被访问的任一顶点w1 ,再访问与w1邻接且未被访问的任一顶点…重复上述过程。当不能再继续向下访问时,依次退回到最近被访问的顶点,若它还有邻接顶点未被访问过,则从该点开始继续上述搜索过程,直至图中所有顶点均被访问过为止。
递归算法如下:
bool visited[MAX_VERTEX_NUM]; //访问标记数组
/*从顶点出发,深度优先遍历图G*/
void DFS(Graph G, int v){int w;visit(v); //访问顶点visited[v] = TRUE; //设已访问标记//FirstNeighbor(G,v):求图G中顶点v的第一个邻接点,若有则返回顶点号,否则返回-1。//NextNeighbor(G,v,w):假设图G中顶点w是顶点v的一个邻接点,返回除w外顶点vfor(w = FirstNeighbor(G, v); w>=0; w=NextNeighor(G, v, w)){if(!visited[w]){ //w为u的尚未访问的邻接顶点DFS(G, w);}}
}
/*对图进行深度优先遍历*/
void DFSTraverse(MGraph G){int v; for(v=0; v<G.vexnum; ++v){visited[v] = FALSE; //初始化已访问标记数据}for(v=0; v<G.vexnum; ++v){ //从v=0开始遍历if(!visited[v]){DFS(G, v);}}
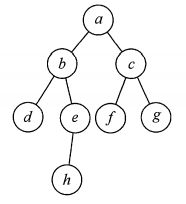
}以下面这个无向图为例,其深度优先遍历结果为:abdehcfg
② DFS算法性能
DFS算法是一个递归算法,需要借助一个递归工作栈,故其空间复杂度为O(V);
对于n个顶点e条边的图来说,邻接矩阵由于是二维数组,要查找每个顶点的邻接点需要访问矩阵中的所有元素,因此都需要O(V2)的时间;
而邻接表做存储结构时,找邻接点所需的时间取决于顶点和边的数量,所以是O(V+E);
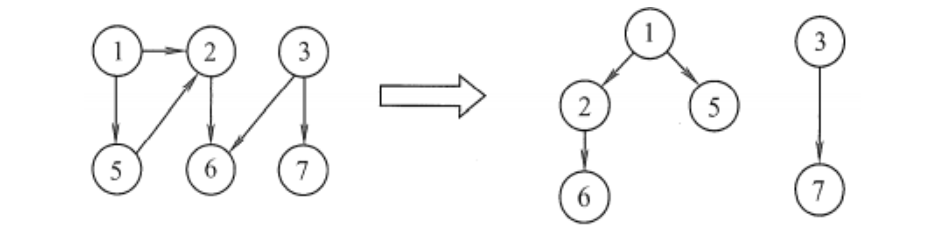
③ 深度优先的生成树和生成森林
深度优先搜索会产生一棵深度优先生成树。 当然,这是有条件的,即对连通图调用DFS才能产生深度优先生成树,否则产生的将是深度优先生成森林;如下图所示。基于邻接表存储的深度优先生成树是不唯一的 。
1.4.2、广度优先遍历(BFS)
① BFS算法
广度优先搜索是一种分层的查找过程,每向前走一步可能访问一批顶点,不像深度优先搜索那样有往回退的情况,因此它不是一个递归的算法。为了实现逐层的访问,算法必须借助一个辅助队列,以记忆正在访问的顶点的下一层顶点。
广度优先遍历的代码:
/*邻接矩阵的广度遍历算法*/
void BFSTraverse(MGraph G){int i, j;Queue Q;for(i = 0; i<G,numVertexes; i++){visited[i] = FALSE;}InitQueue(&Q); //初始化一辅助用的队列for(i=0; i<G.numVertexes; i++){//若是未访问过就处理if(!visited[i]){vivited[i] = TRUE; //设置当前访问过visit(i); //访问顶点EnQueue(&Q, i); //将此顶点入队列//若当前队列不为空while(!QueueEmpty(Q)){DeQueue(&Q, &i); //顶点i出队列//FirstNeighbor(G,v):求图G中顶点v的第一个邻接点,若有则返回顶点号,否则返回-1。//NextNeighbor(G,v,w):假设图G中顶点w是顶点v的一个邻接点,返回除w外顶点vfor(j=FirstNeighbor(G, i); j>=0; j=NextNeighbor(G, i, j)){//检验i的所有邻接点if(!visited[j]){visit(j); //访问顶点jvisited[j] = TRUE; //访问标记EnQueue(Q, j); //顶点j入队列}}}}}
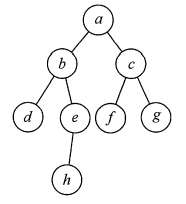
}以下面这个无向图为例,其广度优先遍历的结果为a b c d e f g h abcdefghabcdefgh
② BFS算法性能
无论是邻接表还是邻接矩阵的存储方式,BFS 算法都需要借助一个辅助队列Q,n个顶点均需入队一次,在最坏的情况下,空间复杂度为O (V);
采用邻接表存储方式时,每个顶点均需搜索一次(或入队一次), 在搜索任一顶点的邻接点时,每条边至少访问一次,算法总的时间复杂度为O(V+E);采用邻接矩阵存储方式时,查找每个顶点的邻接点所需的时间为O(V),故算法总的时间复杂度为O(V2);
注意:图的邻接矩阵表示是唯一的,但对于邻接表来说,若边的输入次序不同,生成的邻接表也不同。因此,对于同样一个图,基于邻接矩阵的遍历所得到的DFS序列和BFS序列是唯一的,基于邻接表的遍历所得到的DFS序列和BFS序列是不唯一的。