【机器学习学习笔记】机器学习入门监督学习

1. 机器学习入门
1.1 What is Machine Learning?
"Field of study that gives computers the ability to learn without being explicitly programmed. "
——Arthur Samuel (1959)
亚瑟·萨缪尔:跳棋程序编写者
常用机器学习算法:
- Supervised learning (more important)
- Unsupervised learning

1.2 Supervised learning
监督学习两大类型:
-
Regression(回归)
Predict a number
infinitely many possible outputs
-
Classification(分类)
predict categories
small number of possible outputs
1.3 Unsupervised learning
数据只有输入值x,而没有输出的标签值y,算法会在数据中找到结构,进行分类。
-
Clustering algorithm(聚类)
Group similar data points together
-
Anomaly detection(异常检测)
Find unusual data points
-
Dimensionality reduction(降维)
Compress data using fewer numbers
2. Supervised learning
2.1 单元线性回归模型
2.1.1 Linear Regression Model(线性回归模型)
线性回归模型属于监督学习模型,因为数据集中的每个数据都有确定的值,模型将根据值来进行学习。
Terminology(术语):
Training Set: Data used to train the model
Notation:
- xxx = “input” variable / “input” feature / feature
- yyy = “output” variable / “target” feature /
- mmm = number of training examples
- (x,y)(x, y)(x,y) = single training example
- (x(i),y(i))(x^{(i)}, y^{(i)})(x(i),y(i)) = ithi^{th}ith training example
model:fw,b(x)=wx+bmodel: \\quad f_{w,b}(x) = wx+b model:fw,b(x)=wx+b
“w” means weight / slope, “b” means bias / intercept

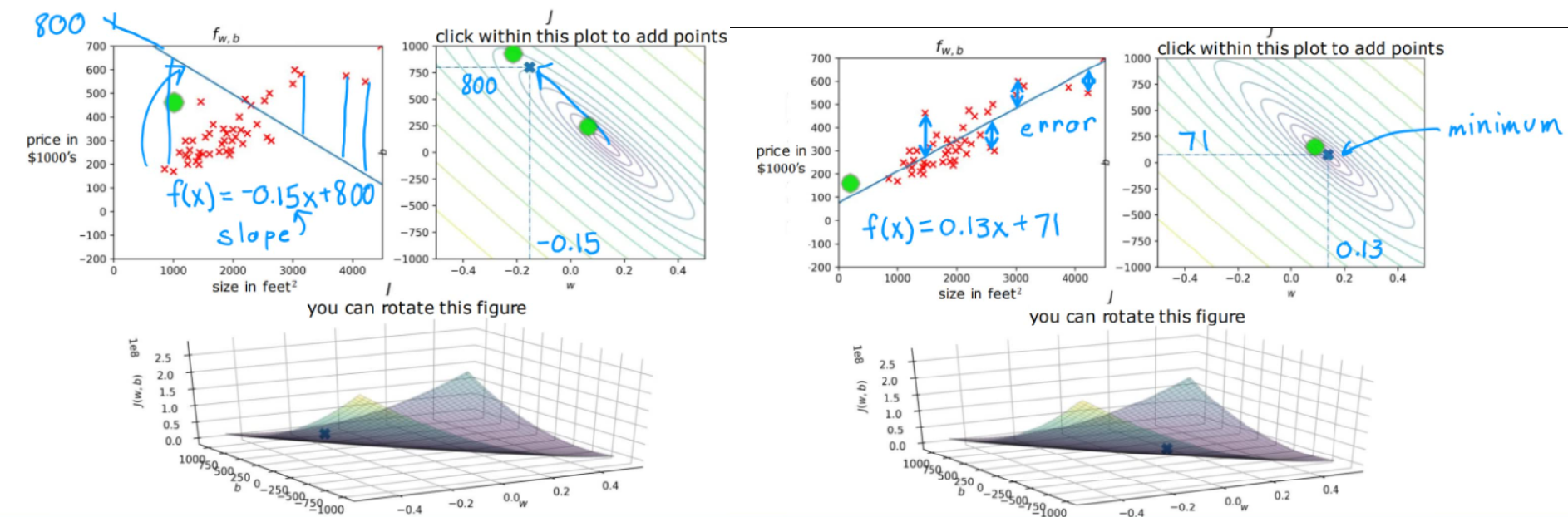
2.1.2 Cost Function(代价函数)
显然,我们希望选取的模型能够很好的拟合训练集中的数据,这就需要一个参数来量化当前的拟合程度,这就是Cost Function。其中m表示测试集样本的总数,在公式中用于避免代价函数盲目增大,设置为2m是为了便于求导。
J(w,b)=12m∑i=1m(y^(i)−y(i))2=12m∑i=1m(fw,b(x(i))−y(i))2J(w,b) = \\frac{1}{2m} \\sum_{i=1}^m (\\hat{y}^{(i)} - y^{(i)})^2 = \\frac{1}{2m} \\sum_{i=1}^m (f_{w,b}(x^{(i)}) - y^{(i)})^2 J(w,b)=2m1i=1∑m(y^(i)−y(i))2=2m1i=1∑m(fw,b(x(i))−y(i))2
可见,代价函数越大,拟合效果越差。于是,线性回归模型的目标就是找到最小的w值,使得J(w)J(w)J(w)最小化;更普遍的情况是,找到最小的w和b值,使得J(w,b)J(w,b)J(w,b)最小化。
在经典房价预测案例中,我们选取房屋面积作为特征,根据不同的参数可以得到下面的三维图像,纵坐标为代价函数大小,很直观的看到右图中的代价函数要更小,同时也不难看出右图的取值更好的拟合了测试集。
2.1.3 Gradient Descent(梯度下降)
有了代价函数,如何得到合适的参数值就成为了必须解决的问题。通过Gradient Descent,我们可以获得代价最小的参数w和b。
梯度下降算法广泛应用于机器学习,如线性回归模型和深度学习模型中。

在上面的曲面中,通过不断选择当前坐标坡度最大的方向,最终会到达谷底,谷底即local minima,即局部最小值。
梯度下降算法概述:
让w,bw,bw,b以某值开始,通过不断改变w,bw,bw,b来降低J(w,b)J(w, b)J(w,b),直到取得或接近J(w,b)J(w, b)J(w,b)最小值,即:Repeat until convergence(重复,直到收敛)。
repeat{w=w−α∂∂wJ(w,b)b=b−α∂∂bJ(w,b)}simultaneousupdates\\begin{align} & repeat\\{ \\\\ &\\qquad w = w - α \\frac{∂}{∂w}J(w,b) \\\\ &\\qquad b = b - α \\frac{∂}{∂b}J(w,b) \\\\ & \\}simultaneous \\quad updates \\end{align} repeat{w=w−α∂w∂J(w,b)b=b−α∂b∂J(w,b)}simultaneousupdates
α=LearningRateα = Learning \\ Rateα=Learning Rate,即学习率,控制梯度下降的步长;
∂∂w=Derivative\\frac{∂}{∂w} = Derivative∂w∂=Derivative,即导数项(偏导数,Partial derivative),控制梯度下降的方向。
2.2 多元线性回归模型
2.2.1 Multiple features (variables)
很多实际情况并不止有一个特征,比如决定房价的不只有面积。对于有多个特征的线性回归模型,我们称为多元线性回归模型。
xjx_jxj = jthj^{th}jth feature
nnn = number of features
x⃗(i)\\vec{x}^{(i)}x(i) = features of ithi^{th}ith training example
x⃗j(i)\\vec{x}^{(i)}_jxj(i) = value of feature jjj in ithi^{th}ith training example
Model:fw,b(x)=w1x1+w2x2+w3x3+w4x4+bModel: \\quad f_{w,b}(x) = w_1x_1+w_2x_2+w_3x_3+w_4x_4+b Model:fw,b(x)=w1x1+w2x2+w3x3+w4x4+b
进一步可以表达为:
fw⃗,b(x⃗)=w⃗⋅x⃗+bf_{\\vec{w},b}(\\vec{x}) = \\vec{w}·\\vec{x}+b fw,b(x)=w⋅x+b
在Python中,向量的计算可以通过调用NumPy库,实现快速且间接的运算,其中,w和x均为向量
w = np.array([1.0, 2.5, -3.3])
b = 4
x = np.array([10, 20, 30])f = np.dot(w, x) + b

通过向量化运算,计算机同时获取向量的所有数据,并且对两向量的每个维度进行同时运算,然后调用专门的并行处理硬件求和;而左侧的for循环则是依次相乘并累加。显然,使用向量可以节省很大的时间。
2.2.2 针对多元回归的梯度下降
| Previous notation | Vector notation | |
|---|---|---|
| Parameters | w1,⋅⋅⋅,wnw_1,···,w_nw1,⋅⋅⋅,wn bbb |
w⃗=[w1⋅⋅⋅wn]\\vec{w}=[w_1 ··· w_n]w=[w1⋅⋅⋅wn] bbb |
| Model | fw,b(x)=w1x1+w2x2+w3x3+w4x4+bf_{w,b}(x) = w_1x_1+w_2x_2+w_3x_3+w_4x_4+bfw,b(x)=w1x1+w2x2+w3x3+w4x4+b | fw⃗,b(x⃗)=w⃗⋅x⃗+bf_{\\vec{w},b}(\\vec{x})=\\vec{w}·\\vec{x}+bfw,b(x)=w⋅x+b |
| Cost function | J(w1,⋅⋅⋅,wn,b)J(w_1,···,w_n,b)J(w1,⋅⋅⋅,wn,b) | J(w⃗,b)J(\\vec{w},b)J(w,b) |
| Gradient descent | repeat{ wj=wj−α∂∂wjJ(w1,⋅⋅⋅,wn,b)w_j=w_j-α\\frac{∂}{∂w_j}J(w_1,···,w_n,b)wj=wj−α∂wj∂J(w1,⋅⋅⋅,wn,b) b=b−α∂∂bJ(w1,⋅⋅⋅,wn,b)b=b-α\\frac{∂}{∂b}J(w_1,···,w_n,b)b=b−α∂b∂J(w1,⋅⋅⋅,wn,b) } |
repeat{ wj=wj−α∂∂wjJ(w⃗,b)w_j=w_j-α\\frac{∂}{∂w_j}J(\\vec{w},b)wj=wj−α∂wj∂J(w,b) b=b−α∂∂bJ(w⃗,b)b=b-α\\frac{∂}{∂b}J(\\vec{w},b)b=b−α∂b∂J(w,b) } |
【梯度下降法扩展】Normal equation(正规方程法):
正规方程法:不需要通过迭代即可求得w,b的值,同时只能用在线性回归模型中。
缺点:不适用于其他学习算法,当特征的数量极大时(如大于10000)计算速度减慢。
在实现线性回归的机器学习库中可以使用正规方程方法,但是梯度下降是寻找参数w,b的推荐方法。
2.3 Practical Tips for Linear Regression
2.3.1 Feature Scaling(特征缩放)
下式为房价案例的线性回归模型,x1x_1x1表示房子大小(size,单位:feet²),x2x_2x2表示卧室数量(#badrooms)
price^=w1x1+w2x2+b\\hat{price}=w_1x_1+w_2x_2+b price^=w1x1+w2x2+b
我们可以假设:x1x_1x1范围为500-2000,x2x_2x2范围为0-5,这都是现实中合理的数据范围,但是当我们给参数w1,w2w_1,w_2w1,w2不同的值,也会得到不同的效果,左侧数据显然不符合实际,这是因为在经典房价案例中,房屋面积的参数对结果的影响更大,而卧室数量的参数影响则较小。

观察下图中左上坐标系,点的位置由于两特征的范围原因,不利于观察;右上坐标系的等高线也不利于进行梯度下降。如果对变量进行Feature Scaling,即特征缩放,改变他们的相对范围,就会使数据分布更合理,梯度下降速度更快

那么如何进行特征缩放呢?
方法一:
对于房屋案例,x1x_1x1的取值范围是500~2000,只需要进行x1,scaled=x12000x_{1,scaled}=\\frac{x_1}{2000}x1,scaled=2000x1,就可以将之范围缩放到0.15~1
同理,x2x_2x2的取值范围是0~5,只需要进行x2,scaled=x25x_{2,scaled}=\\frac{x_2}{5}x2,scaled=5x2,就可以将之范围缩放到0~1

方法二:Mean normalization(均值归一化)
通过缩放将数据点聚集在坐标轴原点的四周(意味着有正负值),范围在-1~1之间
首先求x1x_1x1和x2x_2x2在训练集上的均值μ1\\mu_1μ1和μ2\\mu_2μ2
然后进行:x1,scaled=x1−μ12000−300x_{1,scaled}=\\frac{x_1-\\mu_1}{2000-300}x1,scaled=2000−300x1−μ1以及x2,scaled=x2−μ25−0x_{2,scaled}=\\frac{x_2-\\mu_2}{5-0}x2,scaled=5−0x2−μ2
这样x1x_1x1被缩放到-0.18~0.82,x2x_2x2则被缩放到-0.45~0.54

方法三:Z-score normalization(Z-score归一化)
需要为每一个特征进行计算标准差(standard deviation)以及均值
然后进行:x1,scaled=x1−μ1σ1x_{1,scaled}=\\frac{x_1-\\mu_1}{\\sigma_1}x1,scaled=σ1x1−μ1以及x2,scaled=x2−μ2σ2x_{2,scaled}=\\frac{x_2-\\mu_2}{\\sigma_2}x2,scaled=σ2x2−μ2
这样x1x_1x1被缩放到-0.67~3.1,x2x_2x2则被缩放到-1.6~1.9

总而言之,缩放的范围以及缩放应当选择哪个方法都没有具体的规定,但通过缩放,特征的量级应当相同,否则缩放就没有意义了,梯度下降速度也得不到提升。
2.3.2 检查梯度下降是否收敛
我们应当保证梯度下降算法正确工作。为此,可以构建一个横轴为迭代次数(# iterations),纵轴为代价J(w⃗,b)J(\\vec{w},b)J(w,b)的坐标轴,正确的图像应当是随着迭代次数增加,代价不断下降直至平缓。我们称这条曲线为学习曲线(learning curve)。
在不同的运用场景中,梯度下降的收敛速度可能有很大差异。

如何通过数学方法来确定收敛?
进行Automatic convergence test(自动收敛实验)。
例如:令ϵ\\epsilonϵ为10−310^{-3}10−3,在一次迭代中,如果J(w⃗,b)J(\\vec{w},b)J(w,b)的下降值小于ϵ\\epsilonϵ,我们认为梯度下降收敛。
但是选定一个合适的ϵ\\epsilonϵ也是比较困难的,所以应当结合学习曲线,进行观察。
2.3.3 选择合适的学习率
当出现了下图中的情况时,我们认为可能是代码中有bug或者learning rate过大。这是因为当学习率过大时,w的修改也会变大,因此而造成代价不降反增。

我们可以将α设置为很小的数字,观察迭代过程中代价是否下降,如果此时依然会有波动,那就应该是代码中出现了bug。确定不存在bug后,再逐步增大α,以求更快速的梯度下降。
2.3.4 特征工程(Feature Engineering)
实际问题中的特征往往不只一个,而且我们应当为模型选择合适的特征值,并且对已有特征进行组合获得新的特征。

2.3.5 多项式回归(Polynomial Regression)
一次多项式
fw⃗,b(x)=w1x+bf_{\\vec{w},b}(x) = w_1x+b fw,b(x)=w1x+b
二次多项式
fw⃗,b(x)=w1x+w2x2+bf_{\\vec{w},b}(x) = w_1x+w_2x^2+b fw,b(x)=w1x+w2x2+b
三次多项式
fw⃗,b(x)=w1x+w2x2+w3x3+bf_{\\vec{w},b}(x) = w_1x+w_2x^2+w_3x^3+b fw,b(x)=w1x+w2x2+w3x3+b
二次方根多项式
fw⃗,b(x)=w1x+w2x+bf_{\\vec{w},b}(x) = w_1x+w_2\\sqrt{x}+b fw,b(x)=w1x+w2x+b
2.4 Classification
2.4.1 Logistic Regression(逻辑回归)
【注】此部分内容在西瓜书上被写作“对数几率回归”
有很多现实问题的答案是“是”或者“否”,这样的问题我们称之为二元分类(binary classification)。对于二元分类问题,如果我们通过线性回归进行拟合,就会产生误差。
比如在恶性肿瘤分类的问题中,如果已经进行了拟合,现加入新的坐标点,就可能会出现错误分类。线性拟合显然已无法满足分类问题,我们通过逻辑回归来处理该类问题。

首先引入Sigmoid function(Sigmoid函数),也被称为logistic function(逻辑函数),显然Sigmoid函数的值域为0到1。

如果用g(z)g(z)g(z)来表示这个函数,那么:
g(z)=11+e−z,0<g(z)<1g(z)=\\frac{1}{1+e^{-z}},0<g(z)<1 g(z)=1+e−z1,0<g(z)<1
Model:fw⃗,b(x⃗)=g(w⃗⋅x⃗+b)=11+e−(w⃗⋅x⃗+b)Model:f_{\\vec{w},b}(\\vec{x})=g(\\vec{w}·\\vec{x}+b)=\\frac{1}{1+e^{-(\\vec{w}·\\vec{x}+b)}} Model:fw,b(x)=g(w⋅x+b)=1+e−(w⋅x+b)1
在恶行肿瘤判断案例中,x即为肿瘤大小,y为是否是恶性肿瘤的二元分类,如果一位病人的肿瘤根据计算为fw⃗,b(x⃗)=0.7f_{\\vec{w},b}(\\vec{x})=0.7fw,b(x)=0.7,我们就认为模型告诉我们这位病人的肿瘤有70%的概率为恶性的。
由于P(y=0)+P(y=1)=1P(y=0)+P(y=1)=1P(y=0)+P(y=1)=1,我们也可以说,这位病人的肿瘤有30%的概率为良性的。
有时会有这样的描述,这个式子表示,在给定输入特征的前提下(x为输入,w和b为参数),y等于1的概率是多少(条件概率)。
fw⃗,b(x⃗)=P(y=1∣x⃗;w⃗,b)f_{\\vec{w},b}(\\vec{x})=P(y=1|\\vec{x};\\vec{w},b) fw,b(x)=P(y=1∣x;w,b)
2.4.2 Decision Boundary(决策边界)
根据Sigmoid函数,我们获得了新模型来描述逻辑回归模型:
fw⃗,b(x⃗)=g(w⃗⋅x⃗+b)=11+e−(w⃗⋅x⃗+b)=P(y=1∣x⃗;w⃗,b)f_{\\vec{w},b}(\\vec{x})=g(\\vec{w}·\\vec{x}+b)=\\frac{1}{1+e^{-(\\vec{w}·\\vec{x}+b)}}=P(y=1|\\vec{x};\\vec{w},b) fw,b(x)=g(w⋅x+b)=1+e−(w⋅x+b)1=P(y=1∣x;w,b)
当fw⃗,b(x⃗)>=0.5f_{\\vec{w},b}(\\vec{x})>=0.5fw,b(x)>=0.5,我们认为y^=1\\hat{y}=1y^=1;当fw⃗,b(x⃗)<0.5f_{\\vec{w},b}(\\vec{x})<0.5fw,b(x)<0.5,我们认为y^=0\\hat{y}=0y^=0。所以,什么情况下有fw⃗,b(x⃗)>=0.5f_{\\vec{w},b}(\\vec{x})>=0.5fw,b(x)>=0.5 ?
fw⃗,b(x⃗)>=0.5=>g(z)>=0.5=>z>=0=>w⃗⋅x⃗+b>=0<=>y^=1\\begin{align} &f_{\\vec{w},b}(\\vec{x}) >= 0.5 \\\\ &=> \\quad g(z) >= 0.5 \\\\ &=> \\quad z >= 0 \\\\ &=> \\quad \\vec{w}·\\vec{x} + b >= 0 \\\\ &<=>\\quad \\hat{y} = 1 \\end{align} fw,b(x)>=0.5=>g(z)>=0.5=>z>=0=>w⋅x+b>=0<=>y^=1
当w⃗⋅x⃗+b=0\\vec{w}·\\vec{x}+b=0w⋅x+b=0时,这条线就表示决策边界。下图分别为线性决策边界和非线性决策边界。


2.4.3 Cost Function

现有上述training set,应当如何选取w向量和b?
如果选取平方误差代价函数(Squared error cost function):J(w⃗,b)=1m∑i=1m12(fw⃗,b(x(i))−y(i))2J(\\vec{w},b) = \\frac{1}{m} \\sum_{i=1}^m \\frac{1}{2}(f_{\\vec{w},b}(x^{(i)}) - y^{(i)})^2J(w,b)=m1∑i=1m21(fw,b(x(i))−y(i))2。那么线性回归模型和逻辑回归模型的代价函数图大概如下所示:
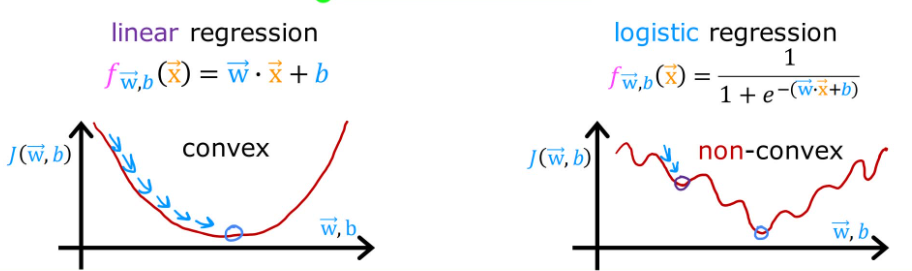
【convex】adj. 凸面的;n. 凸面
对于逻辑回归模型,平方误差代价函数显然不好,因为产生了很多局部极小值,这就使梯度下降过程中会卡在这些地方。所以应当构建一个新的函数,来让代价函数重新凸化。
我们修改一下代价函数J(w⃗,b)J(\\vec{w},b)J(w,b)的定义:
我们把函数L(fw⃗,b(x(i)),y(i))L(f_{\\vec{w},b}(x^{(i)}) , y^{(i)})L(fw,b(x(i)),y(i))称为单个训练例子的损失(the loss on a single training example),称之为损失函数
KaTeX parse error: Expected 'EOF', got '&' at position 29: …oss \\ function:&̲ L(f_{\\vec{w},b…
当y(i)=1y^{(i)}=1y(i)=1(即真实值为1):
- 如果fw⃗,b(x⃗(i))f_{\\vec{w},b}(\\vec{x}^{(i)})fw,b(x(i))趋于1(即预测值趋于1),那么损失就趋于0,说明预测很准确
- 如果fw⃗,b(x⃗(i))f_{\\vec{w},b}(\\vec{x}^{(i)})fw,b(x(i))趋于0,那么损失就趋于无穷大
- 这就意味预测值离真实值越远,损失越大,反之越小

当y(i)=0y^{(i)}=0y(i)=0(即真实值为0):
- 如果fw⃗,b(x⃗(i))f_{\\vec{w},b}(\\vec{x}^{(i)})fw,b(x(i))趋于0(即预测值趋于0),那么损失就趋于0,说明预测很准确
- 如果fw⃗,b(x⃗(i))f_{\\vec{w},b}(\\vec{x}^{(i)})fw,b(x(i))趋于1,那么损失就趋于无穷大

通过上文的叙述,我们归纳出针对逻辑回归的代价函数以及损失函数:
J(w⃗,b)=1m∑i=1mL(fw⃗,b(x⃗(i)),y(i))L(fw⃗,b(x⃗(i)),y(i))={−log(fw⃗,b(x⃗(i))),ify(i)=1−log(1−fw⃗,b(x⃗(i))),ify(i)=0J(\\vec{w},b) = \\frac{1}{m} \\sum_{i=1}^m L(f_{\\vec{w},b}(\\vec{x}^{(i)}) , y^{(i)}) \\\\ \\\\ L(f_{\\vec{w},b}(\\vec{x}^{(i)}) , y^{(i)})= \\begin{cases} -log(f_{\\vec{w},b}(\\vec{x}^{(i)}))&,if\\ \\ y^{(i)}=1\\\\ -log(1-f_{\\vec{w},b}(\\vec{x}^{(i)}))&,if\\ \\ y^{(i)}=0 \\end{cases} J(w,b)=m1i=1∑mL(fw,b(x(i)),y(i))L(fw,b(x(i)),y(i))={−log(fw,b(x(i)))−log(1−fw,b(x(i))),if y(i)=1,if y(i)=0
之前针对线性回归的代价函数为:
J(w⃗,b)=12m∑i=1m(fw⃗,b(x(i))−y(i))2J(\\vec{w},b) = \\frac{1}{2m} \\sum_{i=1}^m (f_{\\vec{w},b}(x^{(i)}) - y^{(i)})^2 J(w,b)=2m1i=1∑m(fw,b(x(i))−y(i))2
2.4.4 Simplified Cost Function
我们可以将上节中得出的分段损失函数改写为下式,通过简单分析就可以得出新式与原式是等价的。
L(fw⃗,b(x⃗(i)),y(i))=−y(i)log(fw⃗,b(x⃗(i)))−(1−y(i))log(1−fw⃗,b(x⃗(i)))L(f_{\\vec{w},b}(\\vec{x}^{(i)}) , y^{(i)})= -y^{(i)}log(f_{\\vec{w},b}(\\vec{x}^{(i)})) -(1-y^{(i)})log(1-f_{\\vec{w},b}(\\vec{x}^{(i)})) L(fw,b(x(i)),y(i))=−y(i)log(fw,b(x(i)))−(1−y(i))log(1−fw,b(x(i)))
于是简化后的代价函数就是:
J(w⃗,b)=1m∑i=1m[L(fw⃗,b(x⃗(i)),y(i))]=−1m∑i=1m[y(i)log(fw⃗,b(x⃗(i)))+(1−y(i))log(1−fw⃗,b(x⃗(i)))]J(\\vec{w},b)= \\frac{1}{m} \\sum_{i=1}^m [L(f_{\\vec{w},b}(\\vec{x}^{(i)}) , y^{(i)})]= -\\frac{1}{m} \\sum_{i=1}^m [ y^{(i)}log(f_{\\vec{w},b}(\\vec{x}^{(i)})) +(1-y^{(i)})log(1-f_{\\vec{w},b}(\\vec{x}^{(i)})) ] J(w,b)=m1i=1∑m[L(fw,b(x(i)),y(i))]=−m1i=1∑m[y(i)log(fw,b(x(i)))+(1−y(i))log(1−fw,b(x(i)))]
2.4.5 Gradient Descent
repeat{wj=wj−α∂∂wJ(w⃗,b)=wj−α[1m∑i=1m(fw⃗,b(x⃗(i))−y(i))xj(i)]b=b−α∂∂bJ(w⃗,b)=b−α[1m∑i=1m(fw⃗,b(x⃗(i))−y(i))]}simultaneousupdates\\begin{align} &repeat \\{ \\\\ &\\qquad w_j = w_j - α \\frac{∂}{∂w} J(\\vec{w},b) = w_j - α [ \\frac{1}{m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)}) x_j^{(i)} ] \\\\ &\\qquad b = b - α \\frac{∂}{∂b} J(\\vec{w},b) = b - α [ \\frac{1}{m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)}) ] \\\\ &\\} simultaneous \\quad updates \\end{align} repeat{wj=wj−α∂w∂J(w,b)=wj−α[m1i=1∑m(fw,b(x(i))−y(i))xj(i)]b=b−α∂b∂J(w,b)=b−α[m1i=1∑m(fw,b(x(i))−y(i))]}simultaneousupdates
对于逻辑回归中的梯度下降参数,我们同样进行同步更新,上式中求偏导后的式子恰好与线性回归中式子相同,但他们的含义并不同。
这是因为在Linear regression中:fw⃗,b(x⃗)=w⃗⋅x⃗+bf_{\\vec{w},b}(\\vec{x}) = \\vec{w} · \\vec{x} + bfw,b(x)=w⋅x+b;但是在Logistic regression中:fw⃗,b(x⃗)=g(w⃗⋅x⃗+b)=11+e−(w⃗⋅x⃗+b)f_{\\vec{w},b}(\\vec{x}) = g(\\vec{w} · \\vec{x} + b) = \\frac{1}{1 + e^{-(\\vec{w} · \\vec{x} + b)}}fw,b(x)=g(w⋅x+b)=1+e−(w⋅x+b)1,但二者都可以进行梯度下降监视。
2.5 Underfitting and Overfitting
2.5.1 Summarize

在经典房价预测案例中,假定已获得上图中的数据,并将这些数据作为测试集进行拟合。
若选用一次多项式进行拟合,显然与趋势不同,因为当面积越来越大,房价也趋于平稳,不会像一次函数一样无限增长。我们称这样的结果为欠拟合(Underfitting)或高偏差(high bias)。
如果选用更高次项的多项式,得到的结果十分准确的拟合了数据集中的每一个训练数据,代价函数也几乎等于零。但这是一条很波动的曲线,有时当面积增加房价反而大幅下降,这显然也与实际不符。我们称这样的结果为过拟合(Overfitting)或高方差(high variance)。
欠拟合和过拟合的模型都不具备泛化(generalization)新样本的能力。

同理,对于逻辑回归模型,也有类似的拟合情况。上图是恶行肿瘤判断案例,x1x_1x1表示患者年龄,x2x_2x2表示肿瘤大小。
2.5.2 Addressing Overfitting
-
Collect more training examples
应对过拟合的方法之一就是搜集更多的测试数据,不断添加新的数据后,过拟合将逐步被解决。但如果无法获取足够多的测试数据,该方法就失效了。
-
Select features to include/exclude
造成过拟合的原因之一可能是选取的特征过多了,有时应当对特征进行舍弃,减少特征的数量也是解决过拟合的方法之一。但如果如此多的特征确实都是无法舍弃的,该方法就失效了。
-
Regularization
正则化是对特征的参数进行缩小,即减小某特征的权重,而非像方法二一样直接删除掉这个特征。即:保留所有特征,但防止权重过大造成过拟合。
2.5.3 Regularization(正则化)
以线性回归模型为例,其代价函数为J(w⃗,b)=12m∑i=1m(fw⃗,b(x⃗(i))−y(i))2J(\\vec{w},b) = \\frac{1}{2m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)})^2J(w,b)=2m1∑i=1m(fw,b(x(i))−y(i))2。
当过度追求最小化代价函数,即minw⃗,b{J(w⃗,b)}=minw⃗,b{12m∑i=1m(fw⃗,b(x⃗(i))−y(i))2}\\underset{\\vec{w},b}{min} \\ \\{J(\\vec{w},b) \\} = \\underset{\\vec{w},b}{min} \\ \\{\\frac{1}{2m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)})^2\\}w,bmin {J(w,b)}=w,bmin {2m1∑i=1m(fw,b(x(i))−y(i))2},就会出现上文中过拟合的情况,显然过拟合时,代价函数的值要比“just right”时代价函数的值要小。所以应当优化代价函数的公式,不应该只考虑估计值与真实值的差距,也应当考虑不同多项式的权重。
比如当下右图中x3,x4x^3,x^4x3,x4的系数w3,w4w_3,w_4w3,w4趋于0时,拟合曲线就会更加平滑,接近下左图的情况。

现将代价函数修改为下式,1000为任意给定的一个较大的数字,旨在进行说明而非强制为1000。
minw⃗,b{J(w⃗,b)}=minw⃗,b{12m∑i=1m(fw⃗,b(x⃗(i))−y(i))2+1000w32+1000w42}\\underset{\\vec{w},b}{min} \\{J(\\vec{w},b)\\} = \\underset{\\vec{w},b}{min} \\{ \\frac{1}{2m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)})^2 + 1000w_3^2 + 1000w_4^2 \\} w,bmin{J(w,b)}=w,bmin{2m1i=1∑m(fw,b(x(i))−y(i))2+1000w32+1000w42}
此时,如果继续追求最小化代价函数,w3,w4w_3,w_4w3,w4也被纳入了考虑范围,并且越小越好。当得到最小化后的代价函数时,由于x3,x4x^3,x^4x3,x4的系数w3,w4w_3,w_4w3,w4趋于0(也称为:对w3,w4w_3,w_4w3,w4进行了惩罚),图像更加趋于二次函数的样子,这样就大幅度消除了过拟合带来的影响,这就是正则化的思想。
但是正则化过程中我们往往无法直接确定哪个特征应当被惩罚,所以正则化的实现通常是惩罚所有特征,现在建立一个对所有特征都进行惩罚的模型,其中,λ\\lambdaλ为正则化参数,对于参数b,是否进行惩罚带来的影响很小。
minw⃗,b{J(w⃗,b)}=minw⃗,b{12m∑i=1m(fw⃗,b(x⃗(i))−y(i))2+λ2m∑j=1nwj2}\\underset{\\vec{w},b}{min} \\{J(\\vec{w},b)\\} = \\underset{\\vec{w},b}{min}\\{ \\frac{1}{2m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)})^2 + \\frac{\\lambda}{2m} \\sum_{j=1}^nw_j^2 \\} w,bmin{J(w,b)}=w,bmin{2m1i=1∑m(fw,b(x(i))−y(i))2+2mλj=1∑nwj2}
上式中第一项为均方误差代价(squared error cost),第二项为正则化项(regularization term)。
当λ\\lambdaλ取不同值时会有不同的惩罚效果,考虑两个极端情况,若λ=0\\lambda=0λ=0,其实就是不进行惩罚,则可能会产生之前的过拟合现象;若λ=1\\lambda=1λ=1,则对每一项都进行了极大的惩罚,这就使得模型变为:fw⃗,b(x⃗)=bf_{\\vec{w},b}(\\vec{x}) = bfw,b(x)=b,也就产生了欠拟合情况。

2.5.4 线性回归模型的正则化
根据上文中给出的新模型,可以得出正则化后的梯度下降算法:
repeat{wj=wj−α∂∂wjJ(w⃗,b)=wj−α[1m∑i=1m(fw⃗,b(x⃗(i))−y(i))xj(i)+λmwj]b=b−α∂∂bJ(w⃗,b)=b−α[1m∑i=1m(fw⃗,b(x⃗(i))−y(i))]}simultaneousupdatesandfw⃗,b(x⃗)=w⃗⋅x⃗+b\\begin{align} &repeat \\{ \\\\ &\\qquad w_j = w_j - α \\frac{∂}{∂w_j} J(\\vec{w},b) = w_j - α [ \\frac{1}{m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)}) x_j^{(i)} + \\frac{\\lambda}{m}w_j ] \\\\ &\\qquad b = b - α \\frac{∂}{∂b} J(\\vec{w},b) = b - α [ \\frac{1}{m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)}) ] \\\\ &\\} simultaneous \\quad updates \\\\\\\\ &and \\quad f_{\\vec{w},b}(\\vec{x}) = \\vec{w} · \\vec{x} + b \\end{align} repeat{wj=wj−α∂wj∂J(w,b)=wj−α[m1i=1∑m(fw,b(x(i))−y(i))xj(i)+mλwj]b=b−α∂b∂J(w,b)=b−α[m1i=1∑m(fw,b(x(i))−y(i))]}simultaneousupdatesandfw,b(x)=w⋅x+b
我们可以对上式中关于wjw_jwj的式子进行简单化简:
wj=wj−α[1m∑i=1m(fw⃗,b(x⃗(i))−y(i))xj(i)+λmwj]=wj−αλmwj−α1m∑i=1m(fw⃗,b(x⃗(i))−y(i))xj(i)=(1−αλm)wj−α1m∑i=1m(fw⃗,b(x⃗(i))−y(i))xj(i)\\begin{align} w_j &= w_j - α [ \\frac{1}{m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)}) x_j^{(i)} + \\frac{\\lambda}{m}w_j ] \\\\ &= w_j - α \\frac{\\lambda}{m} w_j - α \\frac{1}{m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)}) x_j^{(i)} \\\\ &= (1 - α \\frac{\\lambda}{m}) w_j - α \\frac{1}{m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)}) x_j^{(i)} \\\\ \\end{align} wj=wj−α[m1i=1∑m(fw,b(x(i))−y(i))xj(i)+mλwj]=wj−αmλwj−αm1i=1∑m(fw,b(x(i))−y(i))xj(i)=(1−αmλ)wj−αm1i=1∑m(fw,b(x(i))−y(i))xj(i)
对比之前得到的线性回归模型梯度下降算法中关于wjw_jwj的式子:
wj=wj−α1m∑i=1m(fw⃗,b(x⃗(i))−y(i))xj(i)w_j = w_j - α \\frac{1}{m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)}) x_j^{(i)} wj=wj−αm1i=1∑m(fw,b(x(i))−y(i))xj(i)
不难看出,正则化后的表达式与未正则化的表达式的不同之处在于:第一项之前乘了(1−αλm)(1 - α \\frac{\\lambda}{m})(1−αmλ)。
α\\alphaα是学习率,是一个很小的正数(0-1),λ\\lambdaλ是正则化参数,也是一个较小的正数(1-10),m表示一个训练集中的样本数量,通常较大,所以不难算出(1−αλm)(1 - α \\frac{\\lambda}{m})(1−αmλ)是一个略微小于1的正数。
这其实就是正则化的工作原理:在每次迭代时主动减小一些wjw_jwj,然后执行普通更新,所以才使得原本不收敛的学习路线图变得收敛。
2.5.5 逻辑回归模型的正则化
根据逻辑回归模型的代价函数以及前文得到的正则化方法,可以构建新的代价函数:
J(w⃗,b)=−1m∑i=1m{y(i)log[fw⃗,b(x⃗(i))]+(1−y(i))log[1−fw⃗,b(x⃗(i))]}+λ2m∑j=1nwj2J(\\vec{w},b)= -\\frac{1}{m} \\sum_{i=1}^m \\{ \\ y^{(i)}log[f_{\\vec{w},b}(\\vec{x}^{(i)})] +(1-y^{(i)})log[1-f_{\\vec{w},b}(\\vec{x}^{(i)})] \\ \\} + \\frac{\\lambda}{2m} \\sum_{j=1}^nw_j^2 J(w,b)=−m1i=1∑m{ y(i)log[fw,b(x(i))]+(1−y(i))log[1−fw,b(x(i))] }+2mλj=1∑nwj2
同样可以得到下面的正则化后的逻辑回归模型的代价函数:
repeat{wj=wj−α∂∂wjJ(w⃗,b)=(1−αλm)wj−α1m∑i=1m(fw⃗,b(x⃗(i))−y(i))xj(i)b=b−α∂∂bJ(w⃗,b)=b−α1m∑i=1m(fw⃗,b(x⃗(i))−y(i))}simultaneousupdatesandfw⃗,b(x⃗)=g(w⃗⋅x⃗+b)=11+e−(w⃗⋅x⃗+b)\\begin{align} &repeat \\{ \\\\ &\\qquad w_j = w_j - α \\frac{∂}{∂w_j} J(\\vec{w},b) = (1 - α \\frac{\\lambda}{m}) w_j - α \\frac{1}{m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)}) x_j^{(i)} \\\\ &\\qquad b = b - α \\frac{∂}{∂b} J(\\vec{w},b) = b - α \\frac{1}{m} \\sum_{i=1}^m (f_{\\vec{w},b}(\\vec{x}^{(i)}) - y^{(i)}) \\\\ &\\} simultaneous \\quad updates \\\\\\\\ &and \\quad f_{\\vec{w},b}(\\vec{x}) = g(\\vec{w} · \\vec{x} + b) = \\frac{1}{1 + e^{-(\\vec{w} · \\vec{x} + b)}} \\end{align} repeat{wj=wj−α∂wj∂J(w,b)=(1−αmλ)wj−αm1i=1∑m(fw,b(x(i))−y(i))xj(i)b=b−α∂b∂J(w,b)=b−αm1i=1∑m(fw,b(x(i))−y(i))}simultaneousupdatesandfw,b(x)=g(w⋅x+b)=1+e−(w⋅x+b)1