DFIG控制6-c:数字控制延时的分析和补偿

DFIG控制6-c:数字控制延时的分析和补偿
本文基于教程的第6部分。
DFIM Tutorial 6 - Dynamic Analysis of Current Loops in a Wind Turbine based on DFIG
教程提到了这本书:
- S.-K. Sul, Control of Electric Machine Drive Systems. John Wiley & Sons, 2011.
数字控制延时的补偿
数字控制造成的延时
图片来自:
S.-K. Sul, Control of Electric Machine Drive Systems. John Wiley & Sons, 2011.
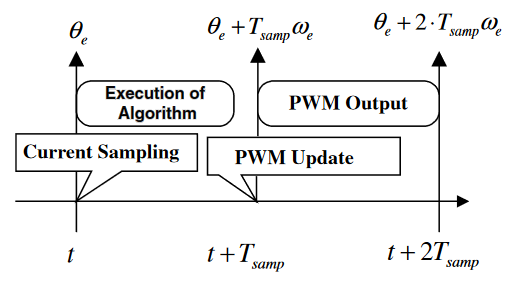
如果采样频率等于控制频率,那么每个控制周期中:
- 采样电压、电流
- 执行控制算法
- 更新PWM比较值
那么这个PWM值会在下一个控制周期生效,在控制周期[t,t+Ts]计算得到的PWM比较值,在[t+Ts,t+2Ts]才正式生效,也就是数字控制造成了一个周期的延时。而在[t+Ts,t+2Ts]时,由于电机转过了一定的角度,此时所需的电压就和[t,t+Ts]时刻有差异,导致控制效果不佳。
简单的补偿方法:把给PWM的的电压信号的相位增加一些,来抵消控制的延时,如下图。
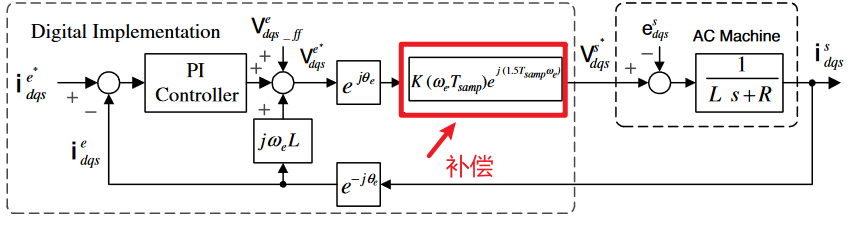
也就是在控制周期 [t,t+Ts]提供[t+Ts,t+2Ts]所需的电压信号。所以,所需的电压信号是[t+Ts,t+2Ts]期间所需电压的均值,对[t,t+Ts]的电压信号乘以一个系数进行修正。对于这个系数,参考书中的计算结果为:K(ωe,Ts)ej(1.5Tsωe)K(\\omega_e, T_{s})e^{j(1.5T_s\\omega_e)}K(ωe,Ts)ej(1.5Tsωe)
其中,
K(ωe,Ts )=2ωeTs sin(ωeTs 2)K\\left(\\omega_e, T_{\\text {s }}\\right)=\\frac{2}{\\omega_e T_{\\text {s }}} \\sin \\left(\\frac{\\omega_e T_{\\text {s }}}{2}\\right) K(ωe,Ts )=ωeTs 2sin(2ωeTs )
书中也提到了 K(ωe,Tsamp )≈1K\\left(\\omega_e, T_{\\text {samp }}\\right) \\approx 1K(ωe,Tsamp )≈1,对控制的影响不大,关键是补偿角度,也就是需要把角度增大 1.5Tsωe1.5T_s\\omega_e1.5Tsωe。
仿真模型修改
在控制器和pwm模块之间,添加了单位延时unit delay,模拟数字控制的延时。
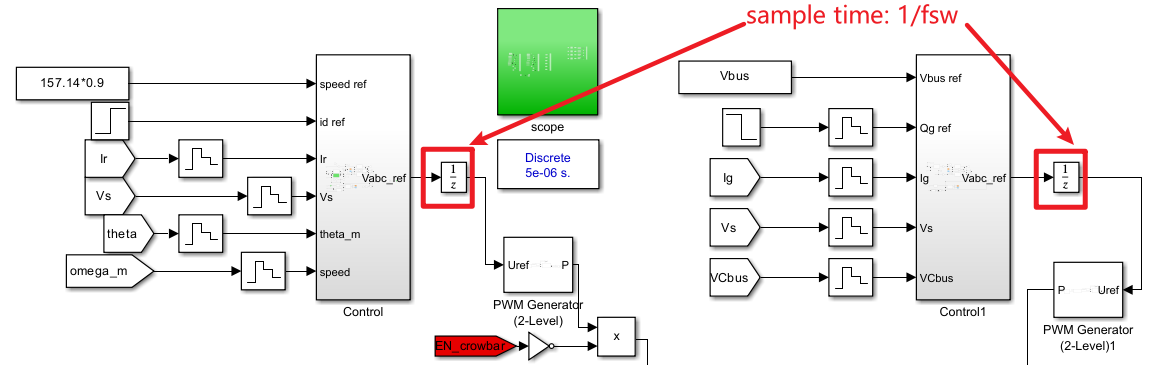
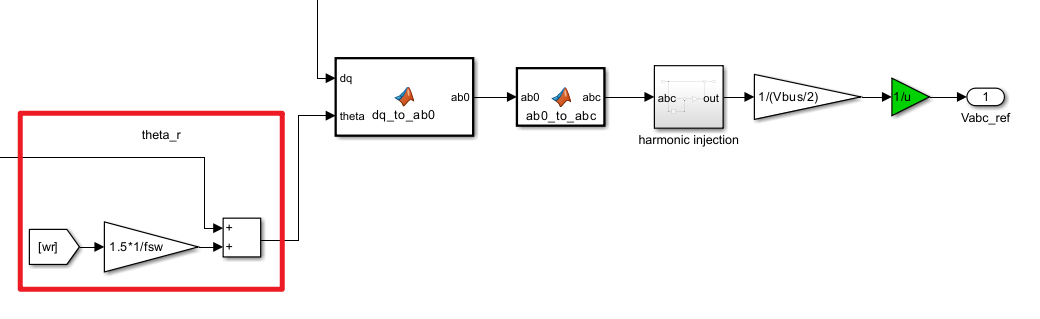
转子侧
转子侧的控制,在park反变换的角度中,直接加上1.5周期转子转动的角度1.5*wr*1/fsw。
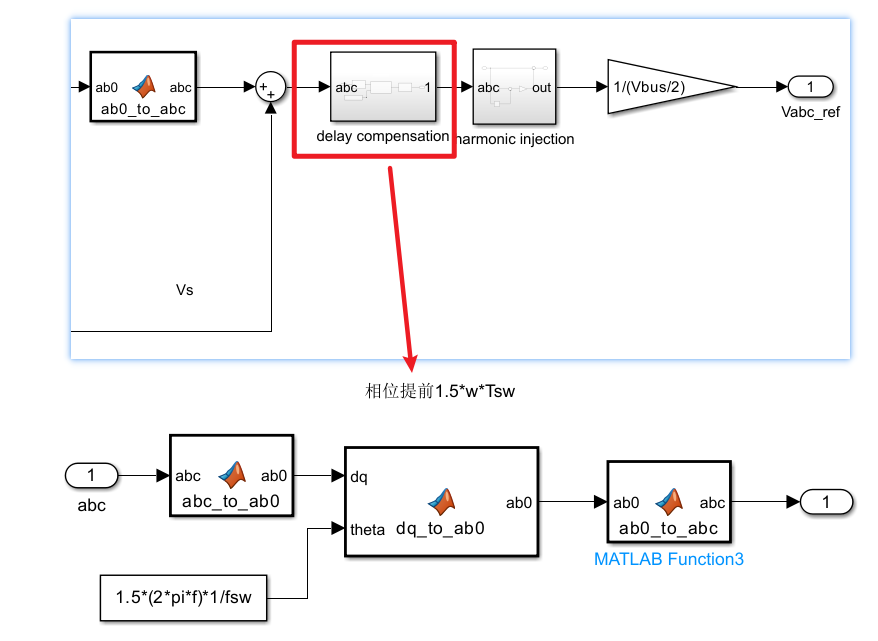
网侧
网侧的电压信号相位也增加1.5*ws*1/fsw。这里需要使用几次坐标变换来实现,具体见DFIG控制6-a: simulink的PLL模块和坐标变换相关问题。
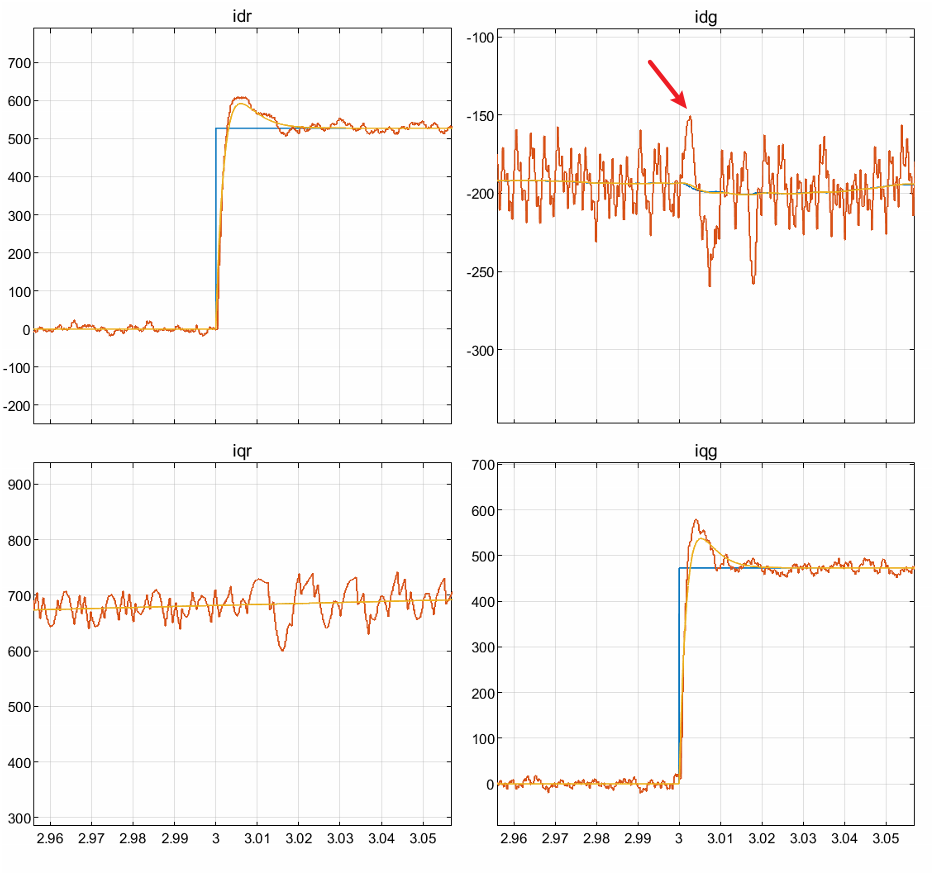
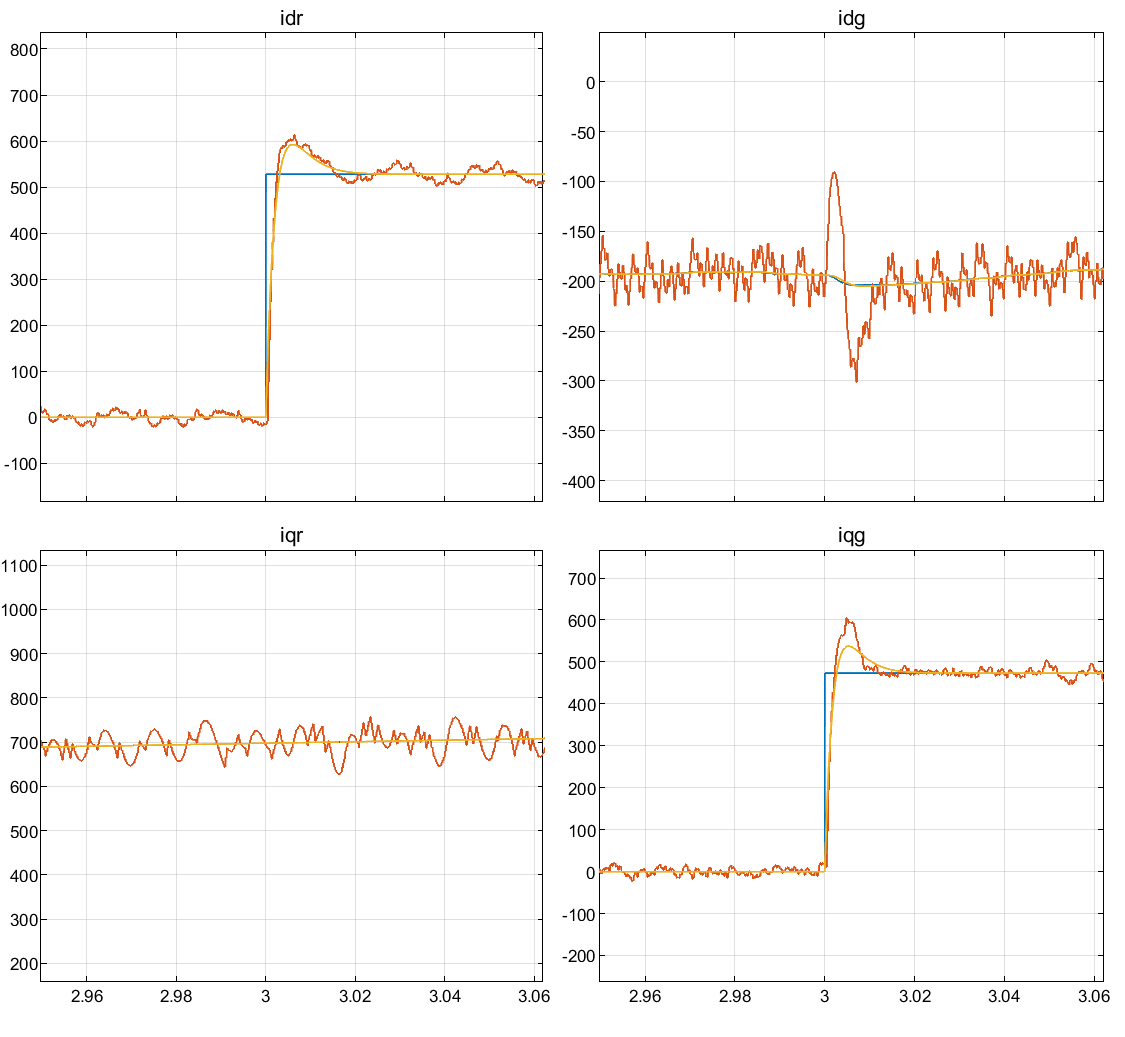
补偿前后对比
补偿角度后,波形有一定改善,但是因为开关频率比较高,改善不是太明显。从网侧的idg和iqg可以看出波形的过冲被减小。
补偿前:
补偿后: