ROS实践13 python模块导入

文章目录
-
- 运行环境:
- 思路:
- 1.1 新建.py
- 1.2 demo02_pub.py 调用 tool.py
- 附:动态获取工作空间地址
运行环境:
ubuntu20.04 noetic
宏基暗影骑士笔记本
思路:
将不同的.py文件关联起来,互相调用
添加scripts路径到python解释器
sys.path.insert(0, “/home/duduzai/demo01_ws/src/demo02_pub_py/scripts”)
1.1 新建.py
前期实现可参考:ROS实践04 发布方实现Python
在scripts下新建脚本tool.py
num = 1000
修改CMakeLists.txt
catkin_install_python(PROGRAMSscripts/demo02_pub.pyscripts/tool.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
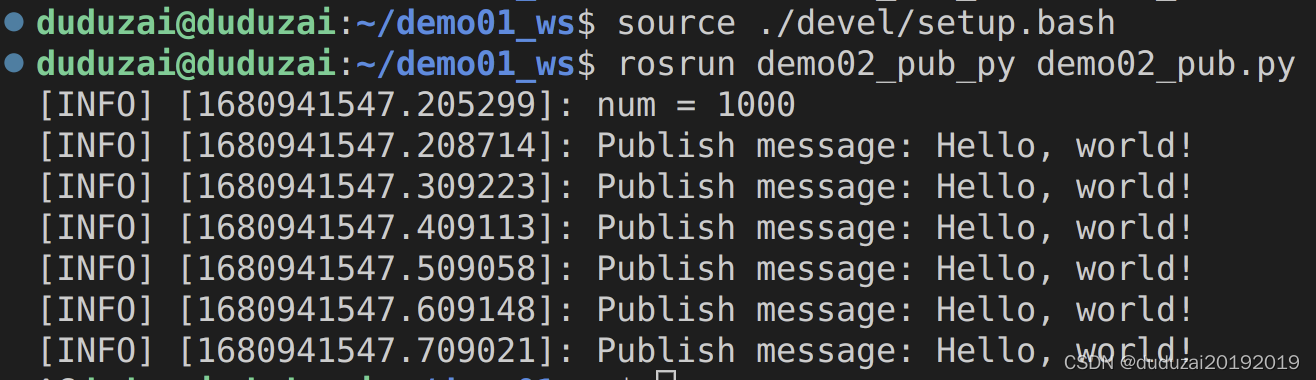
1.2 demo02_pub.py 调用 tool.py
错误示范:
import tool
rospy.loginfo("num = %d",tool.num)
rosrun demo02_pub_py demo02_pub.py
报错:NameError: name ‘tools’ is not defined
问题:路径问题
正确示范:
将scripts路径 添加到python解释器中
sys.path.insert(0, "/home/duduzai/demo01_ws/src/demo02_pub_py/scripts")
import tool
rospy.loginfo("num = %d",tool.num)
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
# import sysimport syssys.path.insert(0, "/home/duduzai/demo01_ws/src/demo02_pub_py/scripts")
import tooldef publisher_node():# 初始化 ROS 节点rospy.init_node('publisher_node', anonymous=True)rospy.loginfo("num = %d",tool.num)# 创建一个名为“message”的话题,消息类型为 std_msgs/Stringpub = rospy.Publisher('message', String, queue_size=10)# 设置发布频率rate = rospy.Rate(10)while not rospy.is_shutdown():# 创建一个 String 类型的消息message = "Hello, world!"# 发布消息pub.publish(message)# 打印发布的消息内容rospy.loginfo("Publish message: %s", message)# 等待一段时间rate.sleep()if __name__ == '__main__':try:publisher_node()except rospy.ROSInterruptException:pass
附:动态获取工作空间地址
import os
import syspath = os.path.abspath(".")
sys.path.insert(0,path + "/src/demo02_pub_py/scripts")通过 abspath 动态获取工作空间地址
⭐⭐⭐嘟嘟崽 ⭐⭐⭐ ⭐⭐⭐祝你成功 ⭐⭐⭐