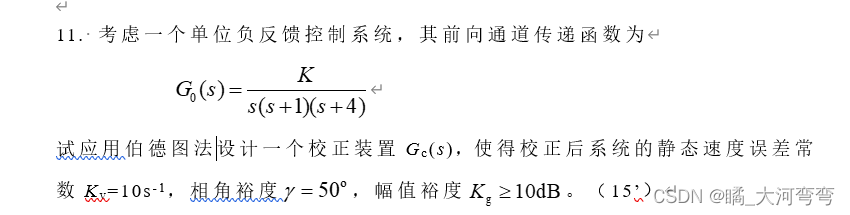
【MATLAB传递函数仿真】虑一个单位负反馈控制系统,其前向通道传递函数为 试应用伯德图法设计一个校正装置Gc(s),使得校正后系统的静态速度误差常

【MATLAB传递函数仿真】虑一个单位负反馈控制系统,其前向通道传递函数为 试应用伯德图法设计一个校正装置Gc(s),使得校正后系统的静态速度误差常
代码:
clc;
clear;KK = 40;%矫正后的开环增益 4*kv
m = 50;
ng0 = KK*[1];
dg0 = conv([1,0],conv([1,1],[1,4]));
G = tf(ng0,dg0);
w = logspace(-2,4);
[ngc,dgc] = fg_lead_pm(ng0,dg0,m,w)gc = tf(ngc,dgc);
g0c=tf(G*gc);
b1=feedback(G,1);
b2 = feedback(g0c,1);
step(b1,'--',b2,'b');
grid on;
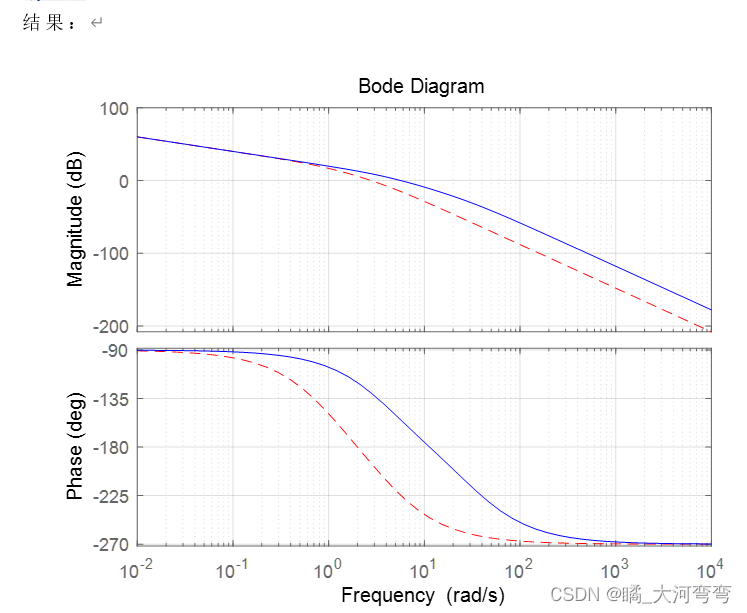
figure(2);
bode(G,'r--',g0c,'b',w);
grid on;
[gm,pm,wcg,wcp] = margin(g0c);
Km = 20*log10(gm);function [ngc,dgc]=fg_lead_pm(ng0,dg0,Pm,w)
[mu,pu]=bode(ng0,dg0,w);
[gm,pm,wcg,wcp]=margin(mu,pu,w);
alf=ceil(Pm-pm+5);
phi=(alf)*pi/180;
a=(1+sin(phi))/(1-sin(phi));
dbmu=20*log10(mu);
mm=-10*log10(a);
wgc=spline(dbmu,w,mm);
T=1/(wgc*sqrt(a));
ngc=[a*T,1];dgc=[T,1];
end结果