无人驾驶路径规划论文简要

|
A Review of Motion Planning Techniques for Automated Vehicles |
综述和分类 |
|
|
0 |
Motion Planning for Autonomous Driving with a Conformal Spatiotemporal Lattice |
从unstructured环境向structured环境的拓展,同时还从state lattice拓展到了spatiotemporal lattice从而解决path+speed=trajectory的motion planning问题 conformed? 顺从结构化道路,比如终点sample的朝向,曲率 k(s) path set, 不需要frenet v(s) speed set 问题: 这种路径和spiral, clothoid 有什么区别 https://zhuanlan.zhihu.com/p/495193848 |
|
1 |
A Real-Time Motion Planner with Trajectory Optimization for Autonomous Vehicles |
spatiotemporal lattice 横向采样用了第一篇的思维, cost 感觉和Apollodp 里面静态动态障碍物差不多 后面优化项没看懂 |
|
2 |
DL-IAPS and PJSO: A Path/Speed Decoupled Trajectory Optimization and its Application in Autonomous Driving |
优化算法SCP sequential convex programming 弹性带理论CES 平滑模型 cost-theta smooth 不是fem PJSO: 粗解cubic polynomial, 细解: pwj |
|
3 |
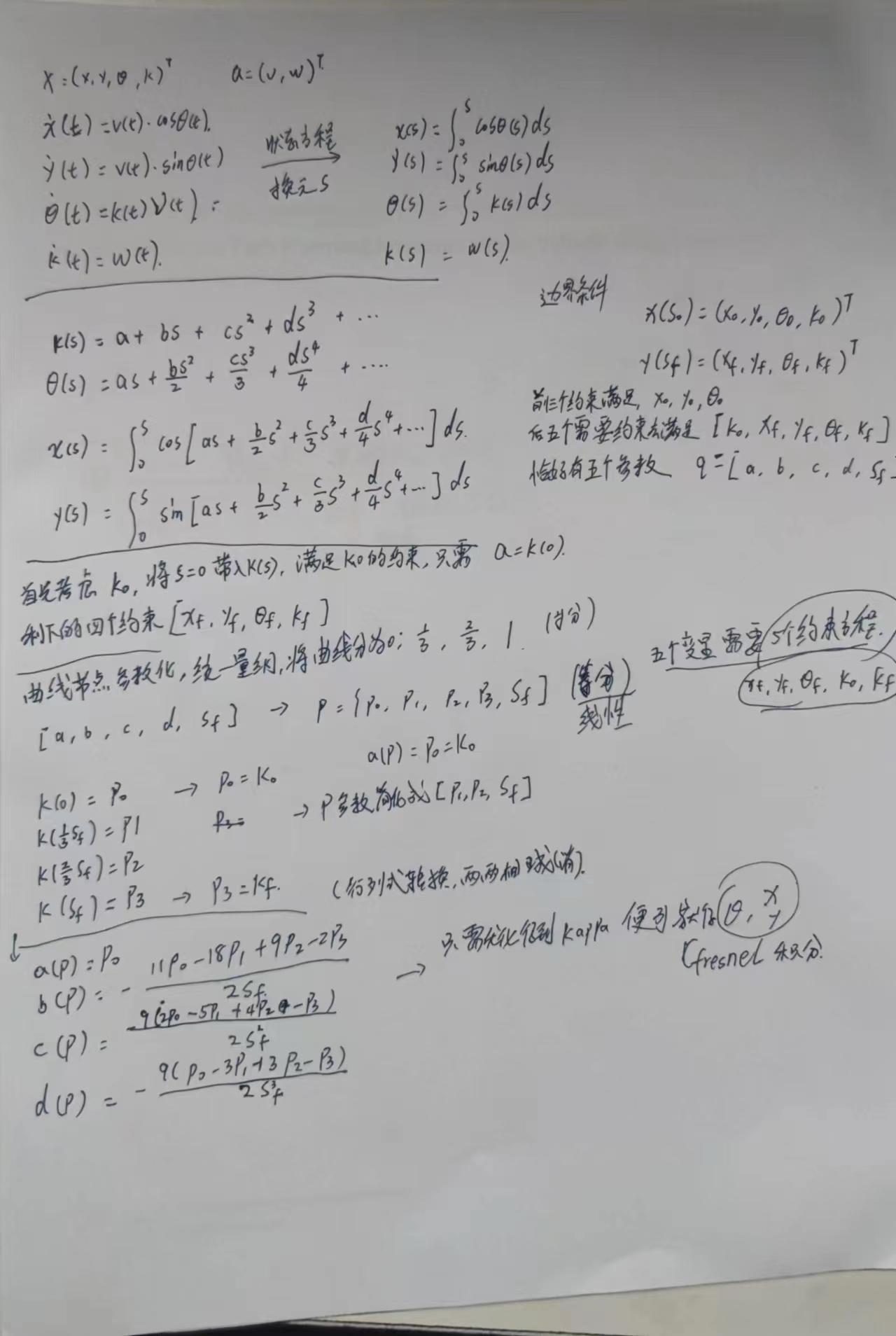
Reactive nonholonomic trajectory generation via parametric optimal control |
基础理论,待读 最优控制 ocp PolyTraj Apollo 2017 cubic spiral / quintic spiral https://zhuanlan.zhihu.com/p/495193848 |
|
4 |
Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame |
BMW werling frenet_lattice_planner / apollo lattice |
|
5 |
FISS: A Trajectory Planning Framework Using Fast Iterative Search and Sampling Strategy for Auto Driving |
对比werlling vanila vs apollo lattice 效率,提出一种迭代最优搜索求解, 主要创新点是快速找出最优解 |
polynomial spiral