usb_cam相机标定实践 ROS

文章目录
-
- 运行环境:
- 1.1 usb_cam连接:
- 1.2 ROS包下载
- 1.3 准备棋盘格
- 1.4 启动相机
- 1.4 开始标定
- 2.1 保存标定结果
- 2.2 移动yaml文件
- 2.3 在launch中添加标定文件
-
-
- 1) 添加标定文件路径
-
- 2.4 报错解决
-
-
- 1)修改 yaml 文件相机名称
- 2)安装v4l-utils依赖
- tip:标定后相机精度有所提升
-
运行环境:
ubuntu20.04 noetic
杰瑞微通usb_cam(分辨率640x480)
宏基暗影骑士笔记本
1.1 usb_cam连接:
1)相机usb--电脑usb
1.2 ROS包下载
sudo apt-get install ros-melodic-camera-calibration
1.3 准备棋盘格
打印A4棋盘格(某宝可购买):
https://markhedleyjones.com/projects/calibration-checkerboard-collection

图像阵列:12 x 9
尺寸size:11 x 8
边长square: 20mm = 0.02m
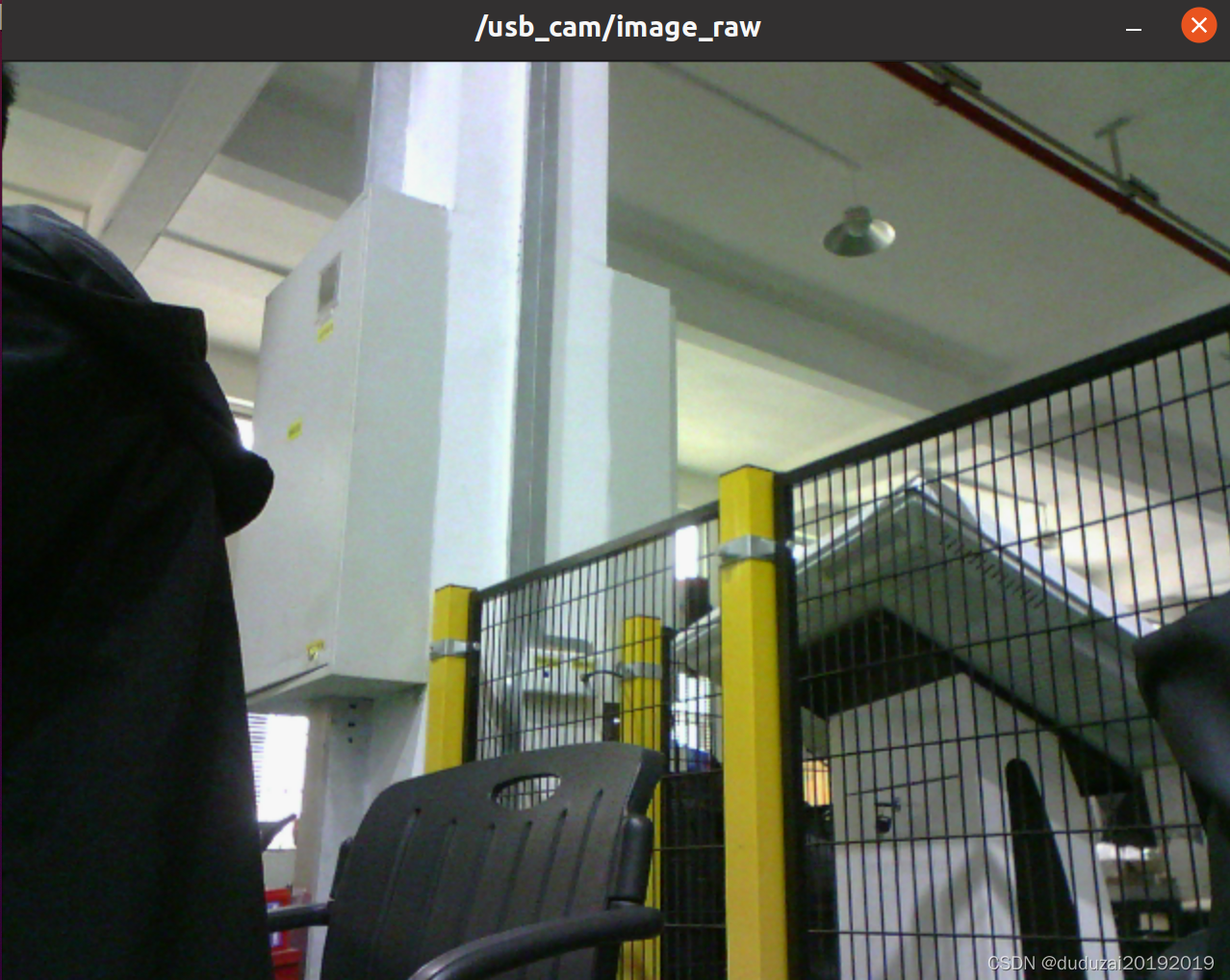
1.4 启动相机
相机配置参考博客:usb_cam 相机ROS配置
cd /home/duduzai/SPbot/usb_cam_ws
roscore
source ./devel/setup.bash
roslaunch usb_cam usb_cam-test.launch
1.4 开始标定
启动标定程序
rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.02 image:=/usb_cam/image_raw camera:=/usb_cam

标定板在相机前不断移动和倾斜,当X Y Size Skew 下面的长条变成绿色,点击CALIBRATE进行标定。
X:标定板左右位置
Y:标定板上下位置
Size:标定板尺寸大小(即距离相机的远近)
Skew:标定板倾斜角度
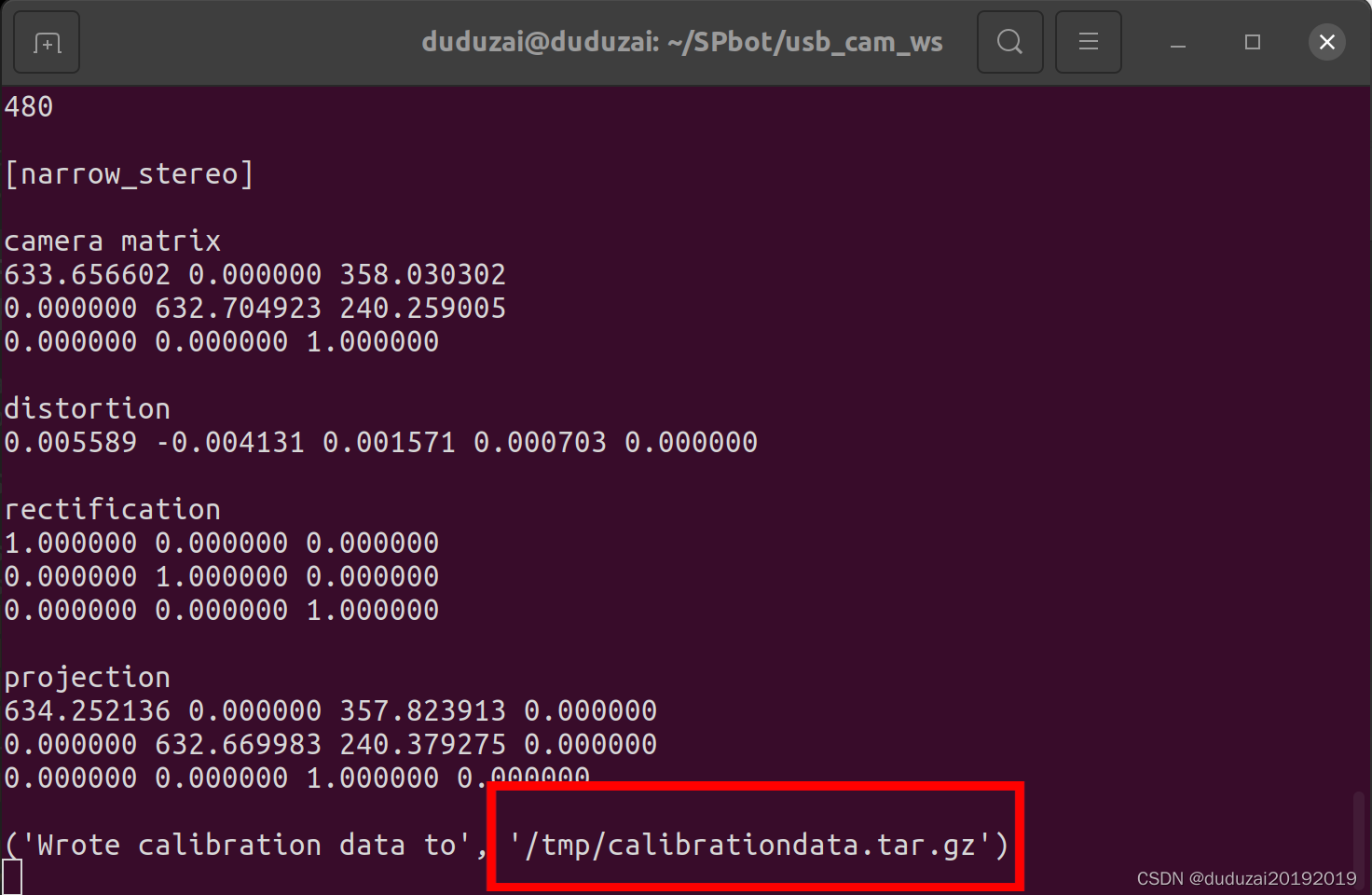
2.1 保存标定结果
点击 1.4 中的SAVE按钮,默认保存到/tmp目录下.
2.2 移动yaml文件
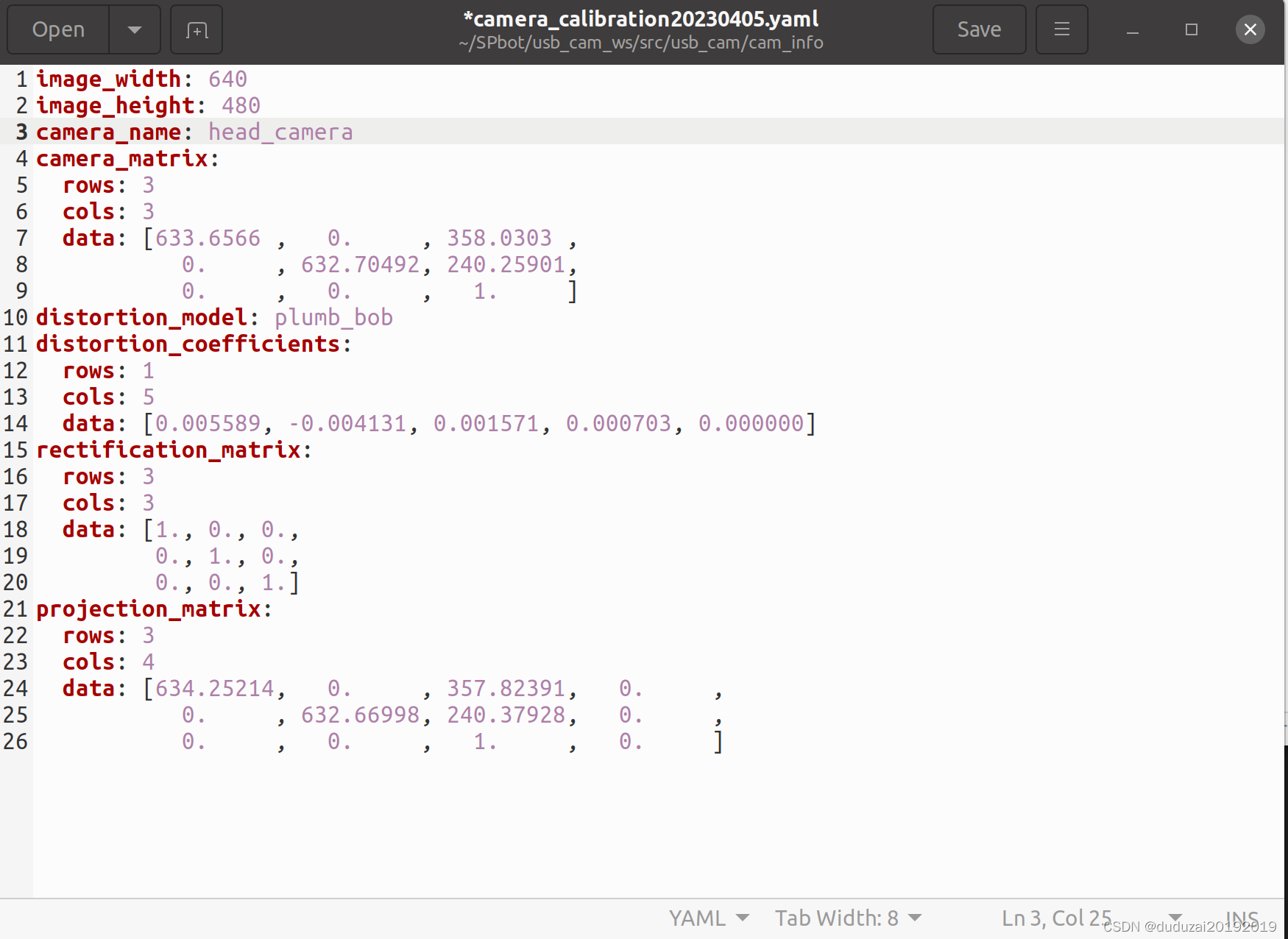
修改ost.yaml文件名为camera_calibration20230405.yaml,并移动到usb_cam/cam_info目录下
/home/duduzai/SPbot/usb_cam_ws/src/usb_cam/cam_info
2.3 在launch中添加标定文件
1) 添加标定文件路径
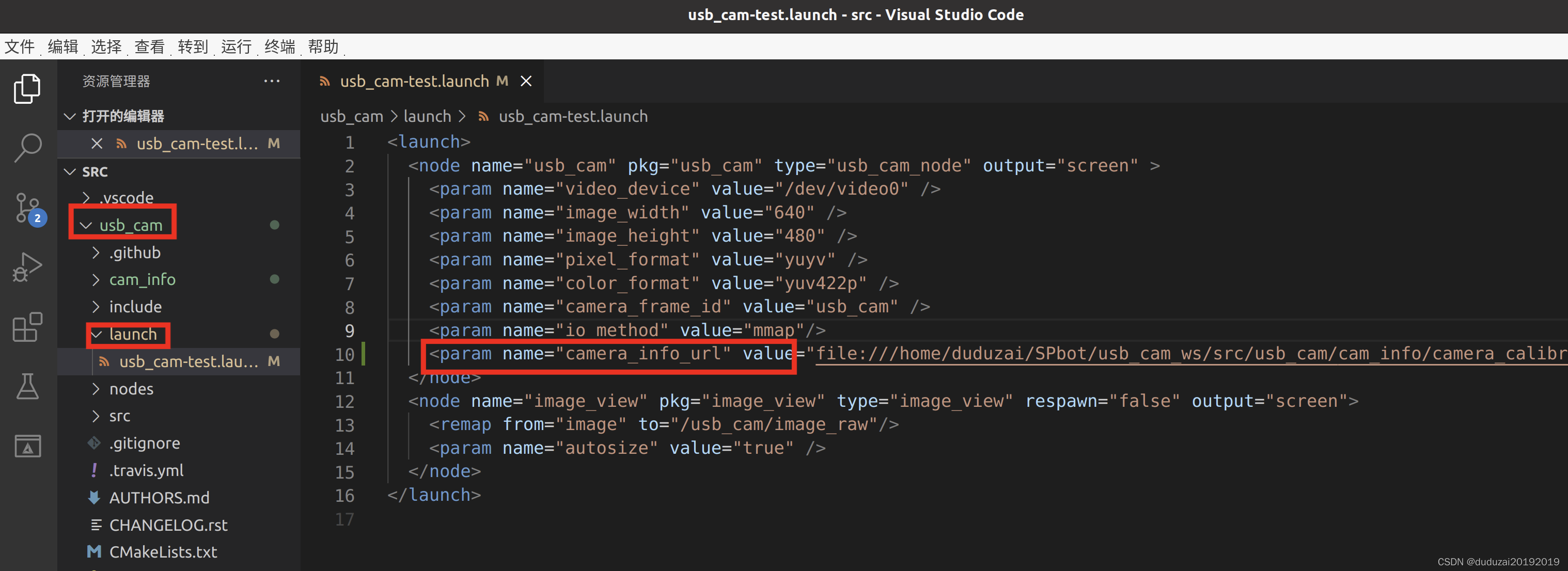
<param name="camera_info_url" value="file:///home/duduzai/SPbot/usb_cam_ws/src/usb_cam/cam_info/camera_calibration20230405.yaml"/>
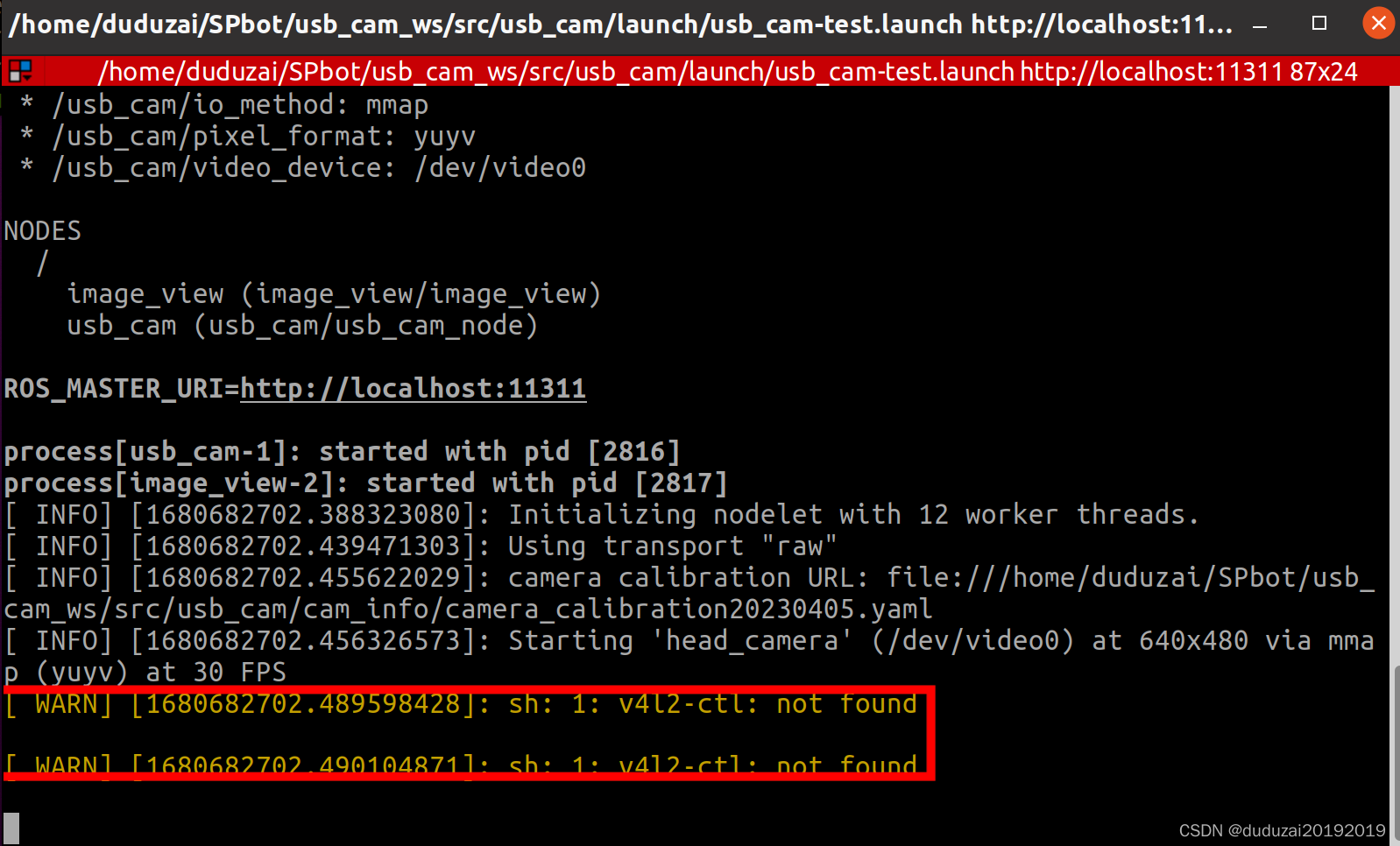
2.4 报错解决
1)修改 yaml 文件相机名称

2)安装v4l-utils依赖
sudo apt-get install v4l-utils
tip:标定后相机精度有所提升
⭐⭐⭐嘟嘟崽 ⭐⭐⭐ ⭐⭐⭐祝你成功 ⭐⭐⭐