PWM互补输出,以及死区时间计算

本文基于野火例程进行解说
实验内容
本次实验输出一对互补的pwm波,且进行死区时间的计算说明。
代码
互补输出对应的定时器初始化代码:
bsp_advance_tim.c
/* @file bsp_advance_tim.c* @author STMicroelectronics* @version V1.0* @date 2015-xx-xx* @brief 高级控制定时器互补输出范例* @attention 实验平台:野火 STM32 F407 开发板 * 论坛 :http://www.firebbs.cn* 淘宝 :http://firestm32.taobao.com/#include "./tim/bsp_advance_tim.h"TIM_HandleTypeDef TIM_TimeBaseStructure;
TIM_OC_InitTypeDef TIM_OCInitStructure;__IO uint16_t ChannelPulse = 500;/* @brief 配置TIM复用输出PWM时用到的I/O* @param 无* @retval 无*/
static void TIMx_GPIO_Config(void)
{/*定义一个GPIO_InitTypeDef类型的结构体*/GPIO_InitTypeDef GPIO_InitStructure;/*开启定时器相关的GPIO外设时钟*/ADVANCE_OCPWM_GPIO_CLK_ENABLE();ADVANCE_OCNPWM_GPIO_CLK_ENABLE();ADVANCE_BKIN_GPIO_CLK_ENABLE(); /* 定时器功能引脚初始化 */ GPIO_InitStructure.Pin = ADVANCE_OCPWM_PIN; GPIO_InitStructure.Mode = GPIO_MODE_AF_PP; GPIO_InitStructure.Pull = GPIO_NOPULL;GPIO_InitStructure.Speed = GPIO_SPEED_HIGH; GPIO_InitStructure.Alternate = ADVANCE_OCPWM_AF;HAL_GPIO_Init(ADVANCE_OCPWM_GPIO_PORT, &GPIO_InitStructure); GPIO_InitStructure.Pin = ADVANCE_OCNPWM_PIN; GPIO_InitStructure.Alternate = ADVANCE_OCNPWM_AF; HAL_GPIO_Init(ADVANCE_OCNPWM_GPIO_PORT, &GPIO_InitStructure);GPIO_InitStructure.Pin = ADVANCE_BKIN_PIN; GPIO_InitStructure.Alternate = ADVANCE_BKIN_AF; HAL_GPIO_Init(ADVANCE_BKIN_GPIO_PORT, &GPIO_InitStructure);
}/ 注意:TIM_TimeBaseInitTypeDef结构体里面有5个成员,TIM6和TIM7的寄存器里面只有* TIM_Prescaler和TIM_Period,所以使用TIM6和TIM7的时候只需初始化这两个成员即可,* 另外三个成员是通用定时器和高级定时器才有.*-----------------------------------------------------------------------------* TIM_Prescaler 都有* TIM_CounterMode TIMx,x[6,7]没有,其他都有(基本定时器)* TIM_Period 都有* TIM_ClockDivision TIMx,x[6,7]没有,其他都有(基本定时器)* TIM_RepetitionCounter TIMx,x[1,8]才有(高级定时器)*-----------------------------------------------------------------------------*/
static void TIM_Mode_Config(void)
{TIM_BreakDeadTimeConfigTypeDef TIM_BDTRInitStructure;// 开启TIMx_CLK,x[1,8] ADVANCE_TIM_CLK_ENABLE(); /* 定义定时器的句柄即确定定时器寄存器的基地址*/TIM_TimeBaseStructure.Instance = ADVANCE_TIM;/* 累计 TIM_Period个后产生一个更新或者中断*/ //当定时器从0计数到999,即为1000次,为一个定时周期TIM_TimeBaseStructure.Init.Period = 1000-1;// 高级控制定时器时钟源TIMxCLK = HCLK=168MHz // 设定定时器频率为=TIMxCLK/(TIM_Prescaler+1)=1MHzTIM_TimeBaseStructure.Init.Prescaler = 168-1; // 采样时钟分频TIM_TimeBaseStructure.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;// 计数方式TIM_TimeBaseStructure.Init.CounterMode=TIM_COUNTERMODE_UP;// 重复计数器TIM_TimeBaseStructure.Init.RepetitionCounter=0; // 初始化定时器TIMx, x[1,8]HAL_TIM_PWM_Init(&TIM_TimeBaseStructure);/*PWM模式配置*///配置为PWM模式1TIM_OCInitStructure.OCMode = TIM_OCMODE_PWM1;TIM_OCInitStructure.Pulse = ChannelPulse;TIM_OCInitStructure.OCPolarity = TIM_OCPOLARITY_HIGH;TIM_OCInitStructure.OCNPolarity = TIM_OCNPOLARITY_HIGH;TIM_OCInitStructure.OCIdleState = TIM_OCIDLESTATE_SET;TIM_OCInitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET;//初始化通道1输出PWM HAL_TIM_PWM_ConfigChannel(&TIM_TimeBaseStructure,&TIM_OCInitStructure,TIM_CHANNEL_1);/* 自动输出使能,断路、死区时间和锁定配置 */TIM_BDTRInitStructure.OffStateRunMode = TIM_OSSR_ENABLE;TIM_BDTRInitStructure.OffStateIDLEMode = TIM_OSSI_ENABLE;TIM_BDTRInitStructure.LockLevel = TIM_LOCKLEVEL_1;TIM_BDTRInitStructure.DeadTime = 0xff;TIM_BDTRInitStructure.BreakState = TIM_BREAK_ENABLE;TIM_BDTRInitStructure.BreakPolarity = TIM_BREAKPOLARITY_LOW;TIM_BDTRInitStructure.AutomaticOutput = TIM_AUTOMATICOUTPUT_ENABLE;HAL_TIMEx_ConfigBreakDeadTime(&TIM_TimeBaseStructure, &TIM_BDTRInitStructure);/* 定时器通道1输出PWM */HAL_TIM_PWM_Start(&TIM_TimeBaseStructure,TIM_CHANNEL_1);/* 定时器通道1互补输出PWM */HAL_TIMEx_PWMN_Start(&TIM_TimeBaseStructure,TIM_CHANNEL_1);
}/* @brief 初始化高级控制定时器定时,1s产生一次中断* @param 无* @retval 无*/
void TIMx_Configuration(void)
{TIMx_GPIO_Config(); TIM_Mode_Config();
}/*END OF FILE/
头文件:
bsp_advance_tim.h
#ifndef __ADVANCE_TIM_H
#define __ADVANCE_TIM_H#include "stm32f4xx.h"/* 定时器 */
#define ADVANCE_TIM TIM8
#define ADVANCE_TIM_CLK_ENABLE() __TIM8_CLK_ENABLE()/* TIM8通道1输出引脚 */
#define ADVANCE_OCPWM_PIN GPIO_PIN_6
#define ADVANCE_OCPWM_GPIO_PORT GPIOC
#define ADVANCE_OCPWM_GPIO_CLK_ENABLE() __GPIOC_CLK_ENABLE()
#define ADVANCE_OCPWM_AF GPIO_AF3_TIM8/* TIM8通道1互补输出引脚 */
#define ADVANCE_OCNPWM_PIN GPIO_PIN_5
#define ADVANCE_OCNPWM_GPIO_PORT GPIOA
#define ADVANCE_OCNPWM_GPIO_CLK_ENABLE() __GPIOA_CLK_ENABLE()
#define ADVANCE_OCNPWM_AF GPIO_AF3_TIM8/* TIM8断路输入引脚 */
#define ADVANCE_BKIN_PIN GPIO_PIN_6
#define ADVANCE_BKIN_GPIO_PORT GPIOA
#define ADVANCE_BKIN_GPIO_CLK_ENABLE() __GPIOA_CLK_ENABLE()
#define ADVANCE_BKIN_AF GPIO_AF3_TIM8extern TIM_HandleTypeDef TIM_TimeBaseStructure;void TIMx_Configuration(void);#endif /* __ADVANCE_TIM_H */
代码讲解
断路功能
//在初始化文件里这几句代码配置了断路功能的模式TIM_OCInitStructure.OCIdleState = TIM_OCIDLESTATE_SET;//当空闲状态下PWM通道置高电平
TIM_OCInitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET;//当空闲模状态下PWM互补通道置低电平
TIM_BDTRInitStructure.BreakState = TIM_BREAK_ENABLE;//开启断路功能
TIM_BDTRInitStructure.BreakPolarity = TIM_BREAKPOLARITY_LOW;//低电平断路
TIM_BDTRInitStructure.AutomaticOutput=TIM_AUTOMATICOUTPUT_ENABLE;//断路状态消失后,自动恢复输出
以上语句表示当断路功能对应的引脚输入变为低电平时,互补输出的功能就被禁止,此时变为空闲状态,而pwm对应的通道输出高电平,互补对应的通道变为低电平,而当断路功能对应的引脚变为高电平时,互补输出又再次出现。
死区时间计算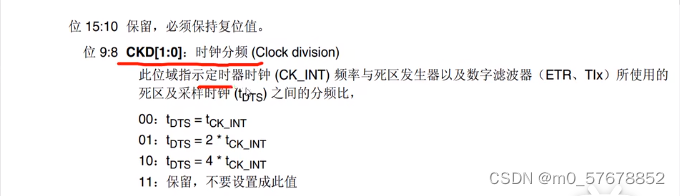
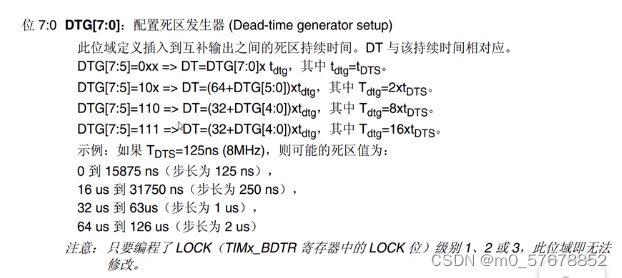
通过上面两张图,就可以知道死区时间的计算公式了
下面列举出配置死区时间的代码
TIM_TimeBaseStructure.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;//设置分频系数,详细看第一张图。TIM_BDTRInitStructure.DeadTime = 0xff;//配置死区时间,具体计算看第二章图开始计算,假设定时器的频率为165Mhz,且配置语句TIM_BDTRInitStructure.DeadTime = 0xff,则DTG[7:0]被写入11111111,则对应第四个计算方式,TIM_TimeBaseStructure.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1表示对定时器频率1分频,则此时tDTS=1*Tck_int = (1/165000000)s,此时代码计算公式
DT=(32+DTG[4:0])*Tdtg=(32+31)16(1/165000000)*1000000us=6us