STM32理论 —— 定时器、时钟

文章目录
- 1. 定时器
-
- 1.1 分类与简介
-
- 1.1.1 分类与主要功能特点
- 1.1.2 三种常用的定时器简介
- 1.1.3 三种计数模式
- 1.1.4 定时器计数原理
- 1.2 时钟来源
- 1.3 通用定时器简介
- 1.4 计数溢出时间公式
- 1.4 定时器中断的原理
- 1.5 输入捕获
- 1.6 核心代码
-
- 1.6.1 通用定时器初始化
- 1.6.2 高级定时器初始化
- 1.7 高级定时器应用 - PWM信号
-
- 1.7.1 定时器产生PWM信号的原理
- 1.7.2 PWM信号频率计算公式
- 1.7.3 PWM 初始化代码
-
- 1.7.3.1 关于TIM_SetComparex函数
- 1.7.3.2 关于TIM_OCMode参数
- 1.7.4 PWM信号控制步进电机
-
- 1.7.4.1 关于函数`TIM_SetCompare1`对电机运动的控制
- 1.7.5 PWM信号控制led
- 1.7.6 PWM信号控制LED闪烁
- 2. 时钟
-
- 2.1 STM32F1系列时钟系统框图
- 2.2 时钟源
- 2.3 系统时钟SYSCLK
- 2.4 USB 时钟
- 2.5 时钟输出
- 2.6 系统时钟通过AHB分频器给外设提供时钟
-
- 2.6.1 APB1和APB2对应的外设(F1系列)
- 2.7 RCC相关寄存器(F1系列)
- 2.8 RCC初始化
1. 定时器
以F103系列为例;
1.1 分类与简介
1.1.1 分类与主要功能特点
-
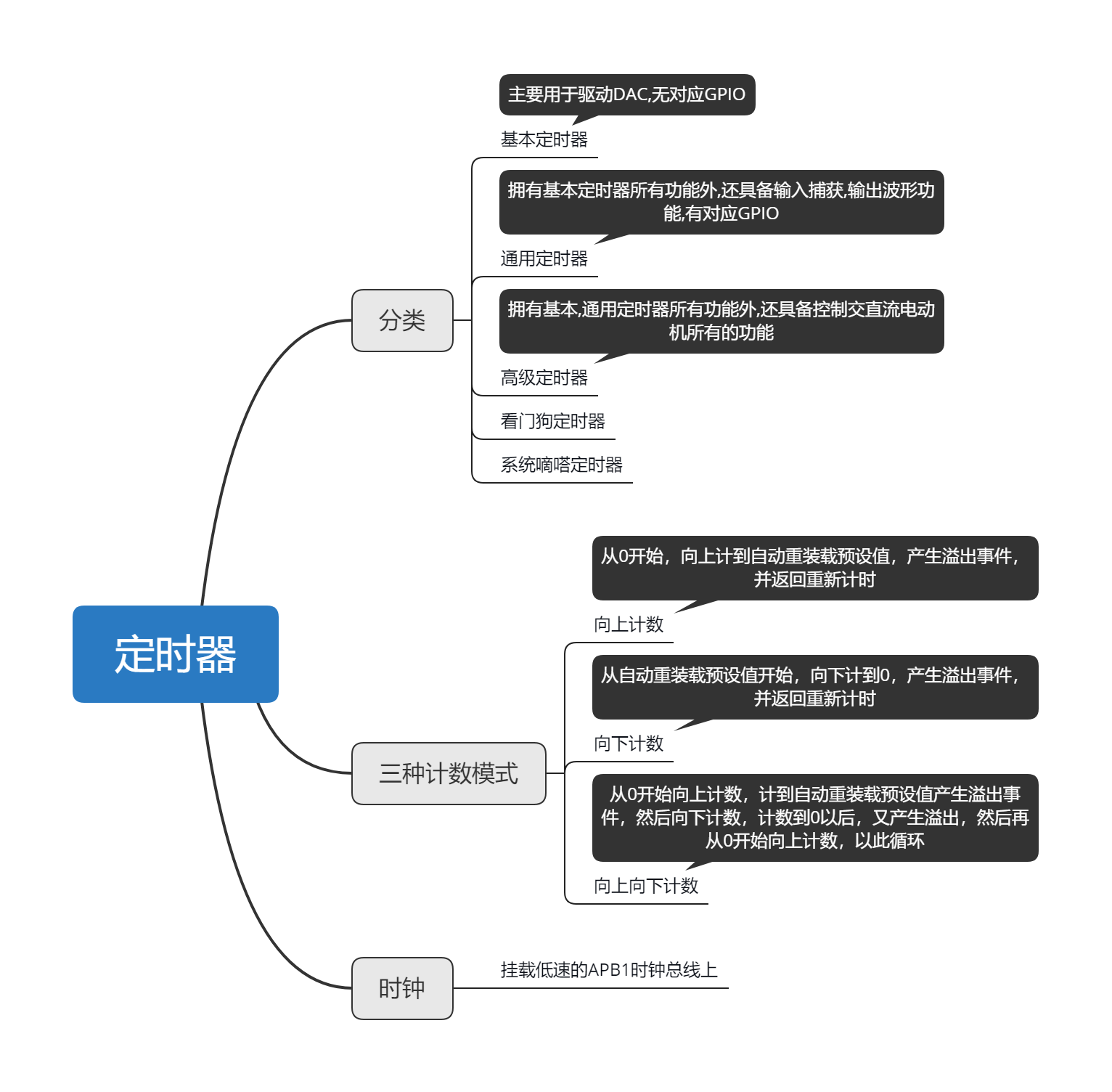
STM32F103系列单片机一共有11个定时器::
2个高级定时器:TIM1、TIM8;挂载在APB2时钟总线上;
4个通用定时器:TIM2~TIM5;挂载在APB1时钟总线上;
2个基本定时器:TIM6、TIM7;
2个看门狗定时器;
1个系统嘀嗒定时器; -
主要功能特点:
- 位于低速的APB1时钟总线上;
- 16位向上、向下、向上向下(中心对齐)计数模式,自动重装载寄存器(TIMx_ARR);
- 16位可编程(可实时修改)预分频器寄存器(TIMx_PSC),计时器时钟频率的分频系数为0~65535之间的任意值;
- 4个独立通道:输入捕获比较(测量输入信号的脉冲长度)、输出比较、PWM信号生成(边缘或中间对齐模式)、单脉冲模式输出;具体对应的IO查看手册中的“定时器复用功能重映射”;
其中预分频系数和自动重载值就是我们要设置的参数,参数设置完后,打开定时器,定时器就开始计数工作;
1.1.2 三种常用的定时器简介

- 三种定时器的主要功能:
- 基本定时器:顾名思义,它只有最基本的定时功能,包含一个16位自动装载计数器,由可编程预分频器驱动,主要用驱动DAC,无对应的外部IO;
- 通用定时器:在基本定时器基础上,还具有测量输入信号的脉冲长度( 输入捕获) 或者产生输出波形( 输出比较和PWM),每个定时器对应有4个外部IO;
- 高级定时器:具有基本,通用定时器的所有的功能外,还具有控制交直流电动机所有的功能,比如它可以输出6路互补带死区的信号、紧急刹车功能、PWM电机控制等等,每个定时器对应有8个外部IO;
1.1.3 三种计数模式
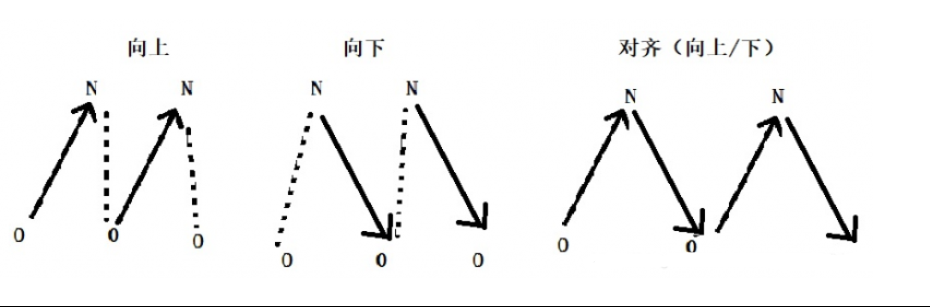
- 向上计数模式:从0开始,向上计到
TIMx_ARR预设值,产生溢出事件,并返回重新计时; - 向下计数模式:从
TIMx_ARR预设值开始,向下计到0,产生溢出事件,并返回重新计时; - 向上/向下计数模式:从0开始向上计数,计到
TIMx_ARR产生溢出事件,然后向下计数,计数到0以后,又产生溢出,然后再从0开始向上计数,以此循环(又叫中央对齐计数模式);
其中
TIMx_ARR为自动重装载值
1.1.4 定时器计数原理
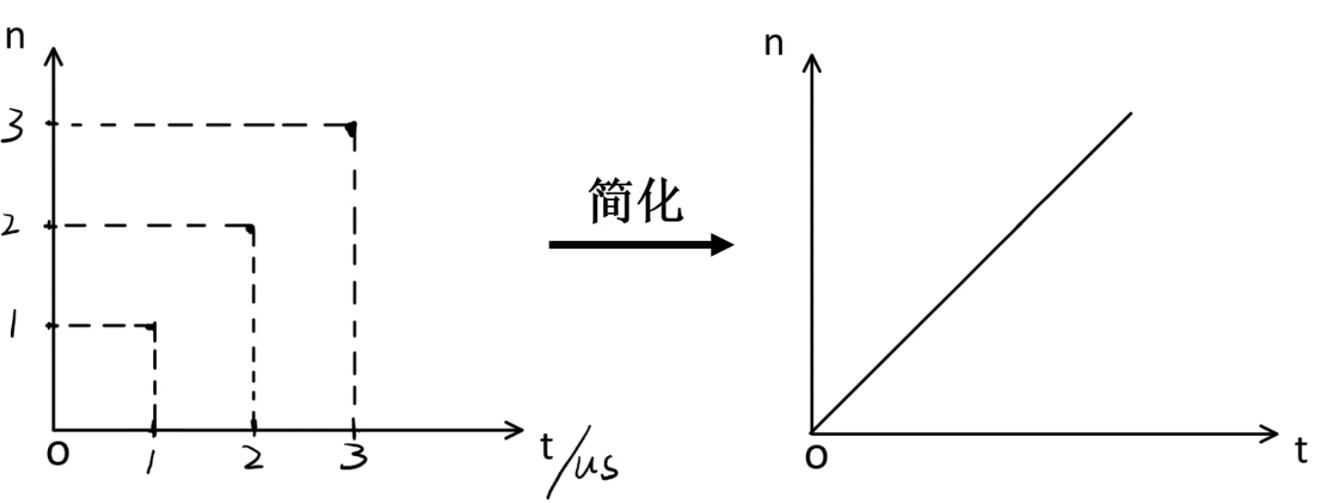
单片机的定时器独立于CPU,目的是分担CPU的计时功能,释放CPU性能;当定时器被开启后,内部的计数器会以预先设定的计数器时钟频率开始计数;
如:设定计时器时钟频率为1MHz,那么定时器被开启后,内部的计数器就每隔1μs(1/1M)进行加1计数;
定时器的计数过程是离散的,为了简化,可把计数过程近似成下图线性直线;
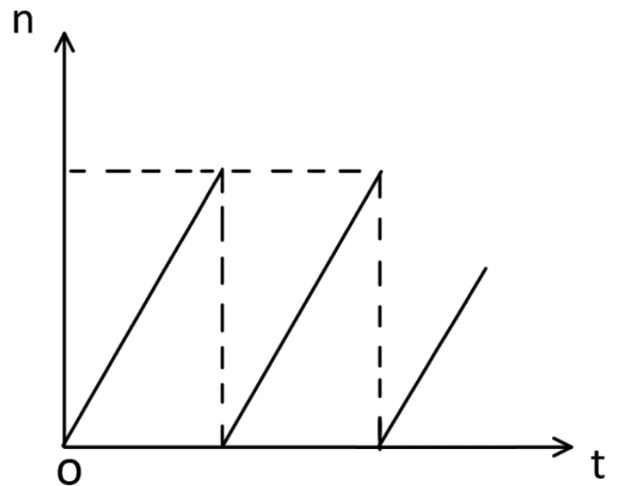
(以向上计数模式为例)当定时器计数到了目标数值(溢出时间)后,会产生溢出事件,然后返回到0,重新进行计数,如此循环(就像时钟走到12会回到0,然后小时数会加1一样);当然这个“目标数值”不是无限大的(就像一天的时间最多是24小时一样),其大小取决于定时器的存储空间位数,如16位定时器(有16位的空间去存储该“目标数值”)每次能计数的最大值就是2^16 - 1=65536-1=65535;
1.2 时钟来源
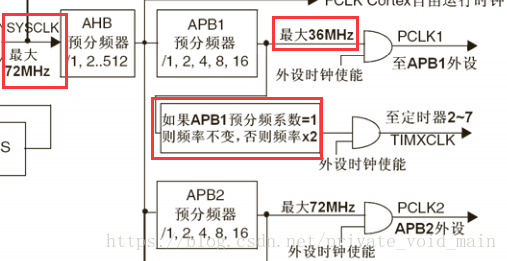
- 内部时钟(CK_INT):如下图,系统时钟
SYSCLK通过预分频产生定时器时钟TIMXCLK,因为APB1产生的时钟最大为36MHz,而APB1一般不为1,所以TIMXCLK的频率一般为72MHz; - 外部时钟模式1:外部输入脚(TIx);
- 外部时钟模式2:外部触发输入(ETR);
- 内部触发输入(ITRx):使用一个定时器作为另一个定时器的预分频器;
1.3 通用定时器简介
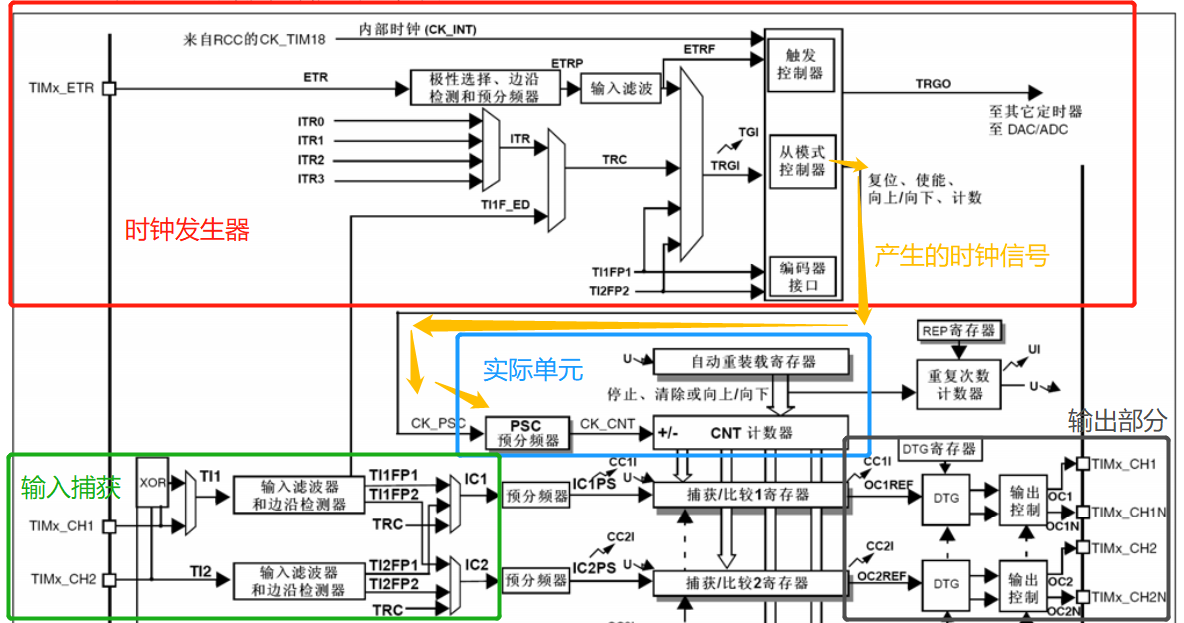
- 通用定时器的工作过程:如下公式所示,内部时钟发生器产生的时钟信号,它又叫工作频率,再经过预分频器PSC分频后,得到计数器时钟频率(一般是72MHz),而计数器时钟频率根据自动重载值最终得到定时器的定时频率(即定时器计数的频率);
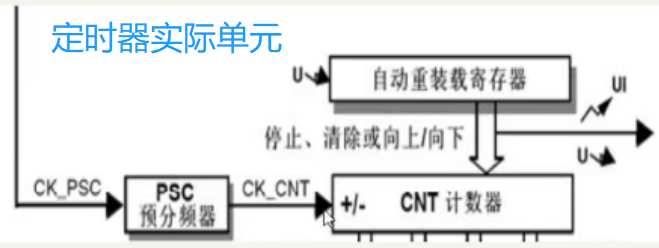
- 如下图中的“实际单元”是通用定时器的主要部分,16位的计数器寄存器(TIMx_CNT),自动重装载寄存器(TIMx_ARR),预分频器寄存器(TIMx_PSC);

1.4 计数溢出时间公式
- 定时器溢出时间就是定时频率(定时器计数频率)的倒数,它取决于以下两个参数:
- 时钟频率(即以下公式中的
(PSC+1)/Tclk,一般单片机的时钟频率Tclk为72MHz); - 自动装载值
ARR;
- 时钟频率(即以下公式中的
时钟频率,见
3.2 时钟来源中的内部时钟(CK_INT)讲解;

- 当定时器计数溢出时,产生一次更新事件,如果使能相应的定时器中断,就相当于在每次定时器溢出时,进入一次定时器中断服务函数;
1.4 定时器中断的原理
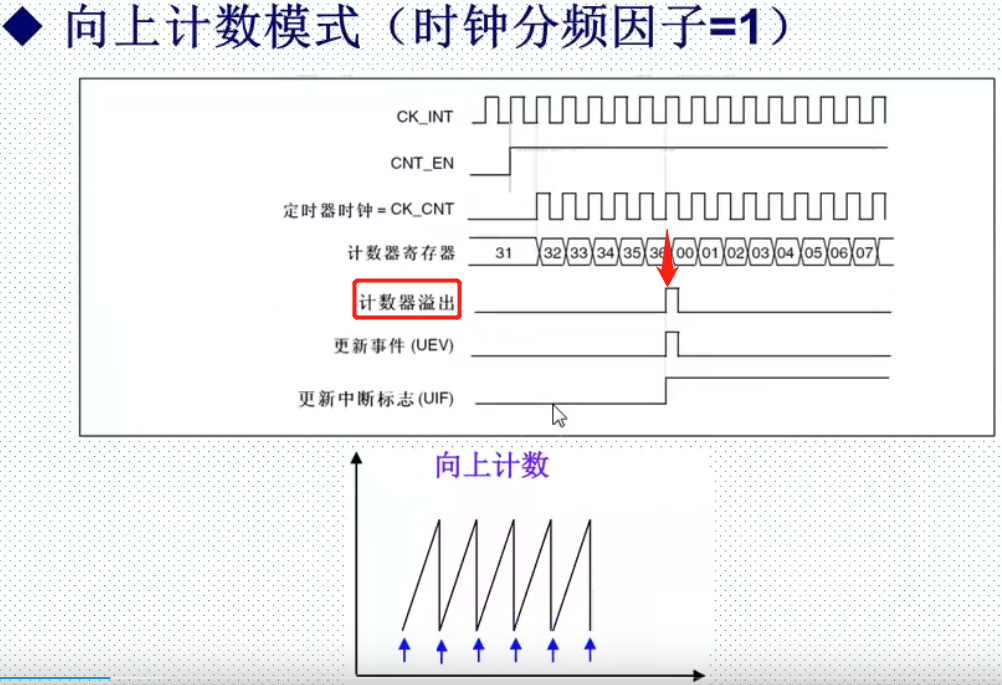
以定时器的向上计数模式为例说明定时器中断的原理,如下图:
- APB1产生的时钟:CK_INT;
- 定时器使能:CNT_EN,使定时器开始计数;
- 定时器时钟:CK_CNT,因为规定时钟分频系数为1,则CK_CNT=CK_INT,否则CK_CNT=CK_INT*2;
- 计数到装载值(图中是 36),计数器溢出,更新溢出事件;
- 如果已使能了中断,则在产生溢出事件时执行中断服务函数,相应的中断标志位更新;
- 中断服务函数执行完毕,开始新的一轮计数;
1.5 输入捕获
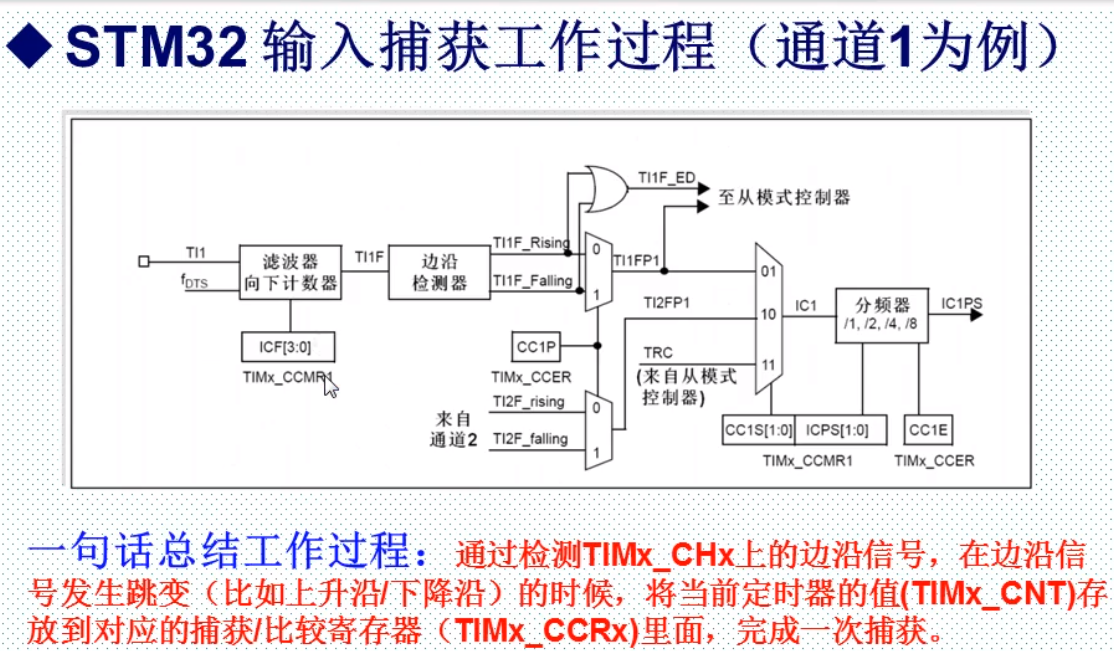
见通用定时器的工作过程原理图的输入捕获部分,下以输入捕获通道 1为例:
- 检测TIMx_CHx 上的边沿信号;
- 边沿信号发生跳变(如设置了捕获一次上升沿跳变),将当前定时器的值TIMx_CNT 存放到对应捕获/比较寄存器TIMx_CCRx中,完成一次捕获;
- 同理进行下一次输入捕获,通过计算两次定时器值的差值,得到目标结果;
1.6 核心代码
1.6.1 通用定时器初始化
/
* 函 数 名: Timer3_Init
* 功能说明: 定时器3初始化,定时器3是个通用定时器
* 形 参:arr:自动重装载值psc:预分配系数
* 返 回 值: 无
/
void Timer3_Init(u16 arr,u16 psc)
{//定义结构体TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_RepetitionCounter = 0x0;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //初始化定时器的时间基数单位//假设预分配系数为7199、计时周期为999,那么定时器的计数周期为:((1+TIM_Prescaler )/72M)*(1+TIM_Period )=((1+7199)/72M)*(1+999)=1ms,即每1ms进入一次定时器中断//定时器中断配置TIM_ITConfig( //使能定时器3的Update中断、Trigger中断TIM3, TIM_IT_Update | //TIM 中断源TIM_IT_Trigger, //TIM 触发中断源 ENABLE //使能);NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级0级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //初始化外设NVIC寄存器TIM_Cmd(TIM3, ENABLE); //使能定时器,定时器开始工作,假如arr为7199,psc为999,则每1ms进入一次中断 TIM_Cmd(TIM3, DISABLE); // 失能定时器
}
/
* 函 数 名: TIM3_IRQHandler
* 功能说明: 定时器3中断服务函数,定时器每次计数溢出都会进入该函数
* 形 参:无
* 返 回 值: 无
/
void TIM3_IRQHandler(void)
{if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查定时器是否发生中断{ CPU_LED = CPU_LED^1;//LED指示灯亮/灭一次if(status_flag == 1) //相应标志位清零{status_flag = 0;rec3_id = 0;}countTime++; // 时间计时,比如设置了每1ms进入一次中断,那么就是每1ms,该变量加1,实现精确计时TIM_ClearITPendingBit(TIM3, TIM_IT_Update); //清除定时器的中断待处理位}
}
1.6.2 高级定时器初始化
/
* 函 数 名: Timer1_Init
* 功能说明: 定时器1初始化,定时器1为高级定时器
* 形 参:arr:自动重装载值psc:预分配系数
* 返 回 值: 无
* 修改日期:2020-9-9
/
void Timer1_Init(u16 arr,u16 psc)
{//结构体定义TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //时钟使能TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割,TDTS = Tck_timTIM_TimeBaseStructure.TIM_RepetitionCounter = 0x0;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //初始化定时器的时间基数单位//假设预分配系数为7199、计时周期为9999,那么定时器的计数周期为:((1+TIM_Prescaler )/72M)*(1+TIM_Period )=((1+7199)/72M)*(1+9999)=1秒TIM_ClearFlag(TIM1, TIM_FLAG_Update);//清除更新标记TIM_ITConfig( //使能定时器1的Update中断、Trigger中断TIM1, TIM_IT_Update | //TIM 中断源TIM_IT_Trigger, //TIM 触发中断源 DISABLE //使能);NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn; //TIM1中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级0级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器TIM_Cmd(TIM1, ENABLE); //使能定时器TIM_ClearITPendingBit(TIM1, TIM_IT_Update); //清除TIMx的中断待处理位:TIM 中断源//TIM_ITConfig(TIM1,TIM_IT_Update,DISABLE); //关闭 定时器中断
}
/
* 函 数 名: TIM1_UP_IRQHandler
* 功能说明: 定时器1中断服务函数,在定时器1发生更新事件时(计数发生上溢出或下溢出时),运行该函数
* 形 参:无
* 返 回 值: 无
/
void TIM1_UP_IRQHandler(void) //TIM1中断
{if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源 {Pulse_Count++; //电机脉冲计数加1
// Uart1_Printf("%d\\r\\n*_*",Pulse_Count);if(Pulse_Count == motor_step)//脉冲计数达到目标值{TIM_SetCompare1(TIM1,0); //设置PWM信号占空比为0,即PWM信号输出恒定的低电平,让电机停下TIM_ITConfig(TIM1,TIM_IT_Update | TIM_IT_Trigger, DISABLE); //关闭定时器1中断,即定时器仍然计数,但不产生中断//TIM_Cmd(TIM1, DISABLE); //关闭定时器1,即完全关闭定时器计数功能}TIM_ClearITPendingBit(TIM1, TIM_IT_Update); //清除TIMx的中断待处理位:TIM 中断源}
}
1.7 高级定时器应用 - PWM信号
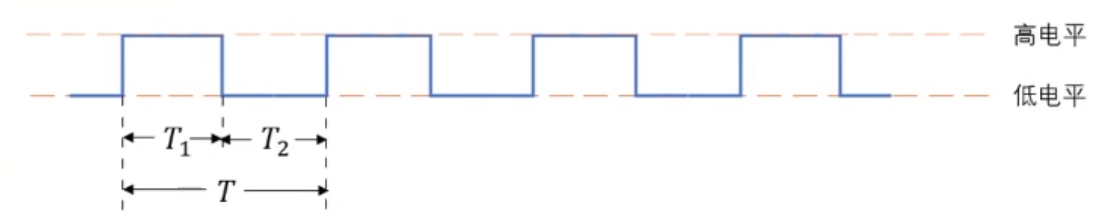
- PWM(Pulse Width Modulation):脉冲宽度调制,即占空比可调的脉冲波形;
占空比:即高电平在一个完整周期中占据的比例,如下图中PWM信号的占空比为
T1/T;
1.7.1 定时器产生PWM信号的原理
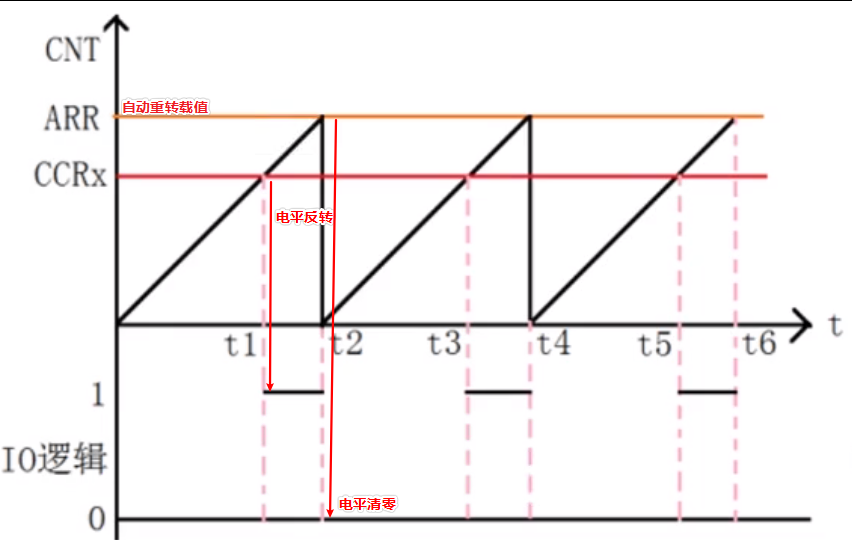
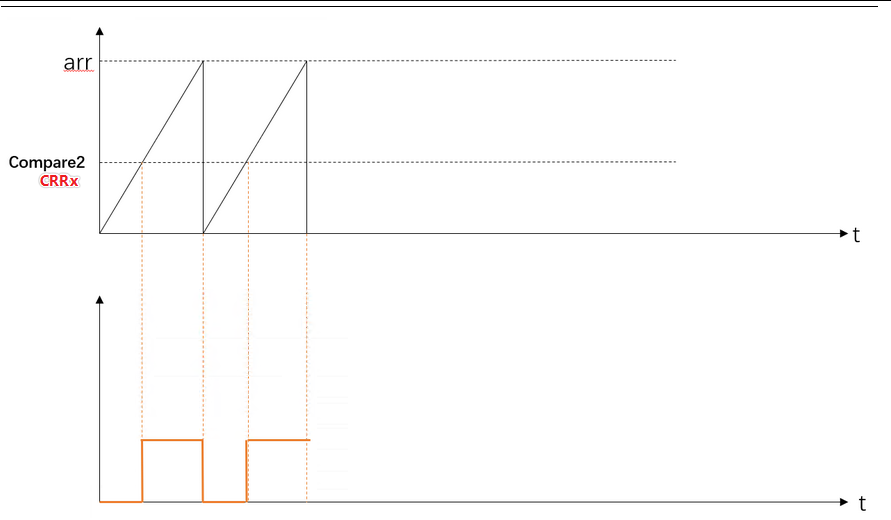
(以向上计数模式为例)如图由定时器的计数原理知:
- 计数器计数到自动重装载值 (TIMx_ARR) 时会返回到0并产生溢出事件,那么自动重装载值就决定了PWM信号的完整周期,自动重装载值越大,PWM信号的周期越长;
- 捕获/比较寄存器(CCRx),当计数值等于CCRx时,输出的IO电平反转,难么CRRx就决定了高电平所占据的时间周期,也即决定了PWM信号的占空比;显然,CRRx的值不能超过TIMx_ARR;
- IO逻辑就是TIMx_ARR和CCRx共同输出的PWM信号;
- 预分频系数PSC:如下图,预分频寄存器PSC两端有输入时钟信号CK_PSC和输出时钟信号CK_CNT,前者是时钟源的输出,后者用于驱动计数器CNT计数,那么通过设置预分频系数PSC,就可以得到不同的CK_CNT,实现0~65535的分频(16位预分频器寄存器(TIMx_PSC)),同时它也决定了PWM信号的频率上限;
1.7.2 PWM信号频率计算公式
其实就是定时器计数频率的公式,即计数溢出时间的倒数,这里使用的STM32 芯片主频为72MHz,则计算公式如下:

其中72000000= 72M为APB1时钟的频率,在APB1预分频系数不为1的情况下,APB1时钟的频率为72MHz;
如:需求一个频率为10KHz,占空比为80%的PWM信号,可把参数设置为:
- PSC=0
- ARR=(72M/10K)-1=7200-1=7199
- CRRx=(ARR+1)*0.8=5760
1.7.3 PWM 初始化代码
下面配置GPIO 口PA8 输出PWM信号,所用的定时器为高级定时器1(TIM1)的PWM 通道1
- 初始化高级定时器1:
/*
函数名称 : TIM1_PWM_Init
功能描述 : PWM参数初始化
输入变量 : 1. arr :重装载值2. psc :预分频系数
返 回 值 : 无
最24后修改人 : xxx
最后更新日期: 20220524
说 明 : 无
*/
void TIM1_PWM_Init(u16 arr,u16 psc) // 使用TIM1 高级定时器输出pwm 波
{TIM_OCInitTypeDef TIM_OCInitStructure;NVIC_InitTypeDef NVIC_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);// 使能TIM1时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIO外设时钟使能TIM_DeInit(TIM1); // 复位TIM1GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_PinRemapConfig(GPIO_FullRemap_TIM1,ENABLE);/TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 用于设置最后输出频率//输出频率=分频频率/(arr+1)TIM_TimeBaseStructure.TIM_Prescaler = psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频时TIMx时钟为72MHz//如果分频,分频频率=72M/(psc+1)TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位TIM_ITConfig( //使能或者失能指定的TIM中断TIM1, //TIM1TIM_IT_Update, //TIM 中断源 - 更新中断DISABLE //不使能);NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn; //TIM1中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级0级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //从优先级3级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能TIM_ClearFlag(TIM1, TIM_FLAG_Update);NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器// 定时器输出比较(output compare)配置TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable; //互补输出关闭TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性低,注意该参数配置成高,TIM_SetComparex() 函数输出的pwm 占空比会反过来,如设置占空比10,则输出90TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Set;TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx的CH1TIM_CtrlPWMOutputs(TIM1,ENABLE); //使能TIM1的PWM输出,只有高级定时器TIM1 和TIM8 有该功能TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能 TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器TIM_Cmd(TIM1, ENABLE); //使能TIM1TIM_ClearITPendingBit(TIM1, TIM_IT_Update); //清除TIMx的中断待处理位:TIM 中断源TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE); //使能定时中断// TIM_InternalClockConfig(TIM1); //配置内部时钟// TIM_UpdateDisableConfig(TIM1, DISABLE); //不使能更新事件
}
//定时器4中断服务程序
void TIM1_UP_IRQHandler(void)
{if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源 {TIM_ClearITPendingBit(TIM1, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源 }
}
- 中断服务函数:
void TIM1_UP_IRQHandler(void)
{if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源 {TIM_ClearITPendingBit(TIM1, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源 }
}
main.c函数:
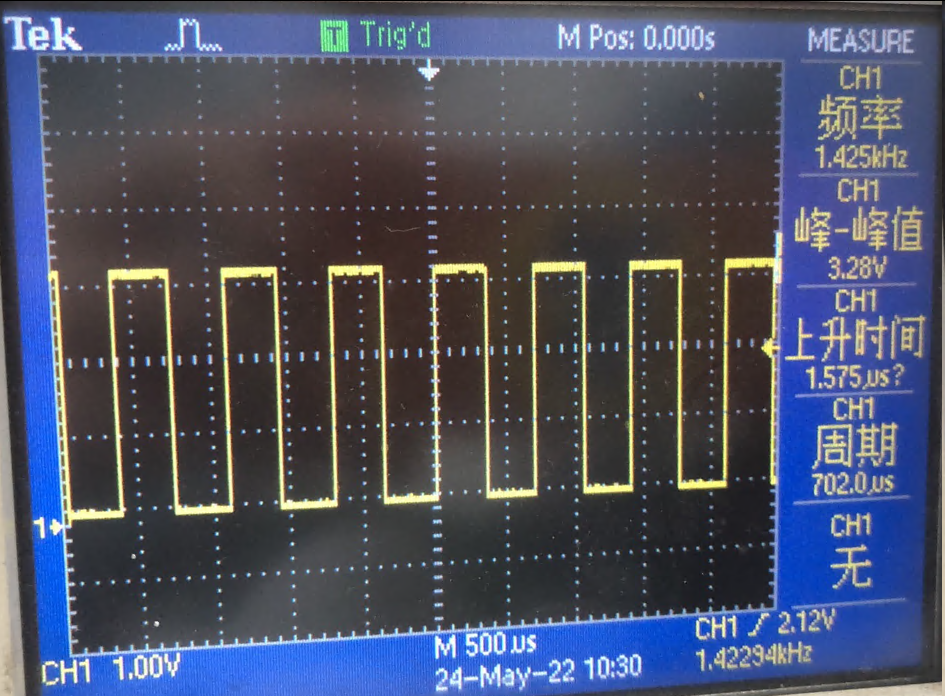
//由公式计算得PWM 输出频率为.422kHz,即每秒翻转约1422次,即每秒输出PWM 波约1422个,周期约为703ns,即输出一个PWM 波耗费703ns
TIM1_PWM_Init(100,500);
TIM_SetCompare1(TIM1,50); // 配置高级定时器1 的通道1,设置占空比为50%=arr/2,这里arr 为100
1.7.3.1 关于TIM_SetComparex函数
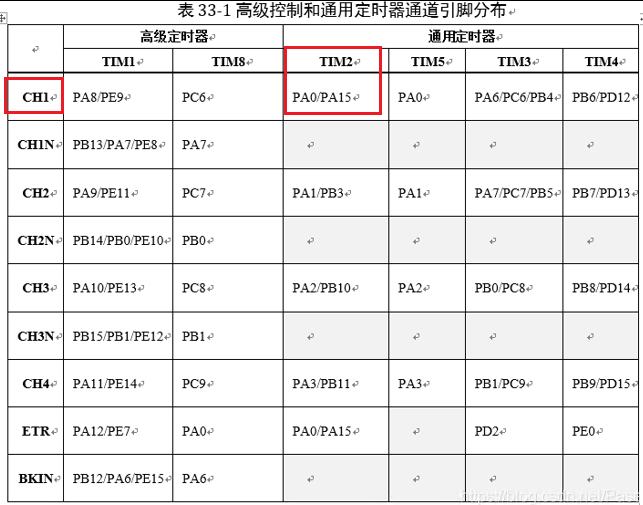
从芯片资料可以找到如下图表33-1 一样的定时器通道引脚配置图表,以PA0为例,将PA0设为PWM 信号输出端口,见图表33-1知,PA0位于定时器通道CH1上,那么设置它的占空比的函数就是TIM_SetCompare1(). 以此类推,位于定时器通道CH2上的端口,设置它的占空比的函数就是TIM_SetCompare2().
- 占空比计算公式:由1.7.2 节中知,【CRRx=(ARR+1)*占空比】,而这里的compare 值就是公式中的CRRx,故占空比公式就是
Duty_Cycle= compare/(arr+1)
比如在PWM初始化时,自动重装载值arr设为99,则设定50%的占空比就是
TIM_SetCompare1(TIMx,50);
注:
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;,中参数若配置成TIM_OCPolarity_High,则输出的占空比取反,如配置输出占空比为10%,配置成TIM_OCPolarity_High则输出占空比为90%
- 函数原型:
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1)
//其中:
//TIMx:定时器
//Compare1:与TIMx比较的数,即TIMx的一个完整周期的时间减去这个Compare1,使得TIMx的周期从这个Compare1后的时间内输出值取反;
1.7.3.2 关于TIM_OCMode参数
该参数用于选择脉冲宽度调制的模式,假设高电平为有效电平:
TIM_OCMode_PWM1:在向上计数时,当TIMx_CNT<TIMx_CCR1时通道输出高电平,否则为低电平;在向下计数时,当TIMx_CNT>TIMx_CCR1时,通道为低电平,否则为高电平。TIM_OCMode_PWM2:在向上计数时,当TIMx_CNT<TIMx_CCR1时通道输出低电平,否则为高电平;在向下计数时,当TIMx_CNT>TIMx_CCR1时,通道为高电平,否则为低电平。
1.7.4 PWM信号控制步进电机
该部分定时器中断服务函数见3.6.2 高级定时器初始化中的中断服务函数;
函数索引:
void PSC_Updata(u16 MotorSpeed);
void motorSpeedControl(u16 motorSpeed,u16 moveStep,u8 motorDir);
u8 motorDirSet(int moveStep);
void motorGo(u16 speed);
u8 GetPluseValue(char *string);
void motorMovePluse(u8 motorDir,int motorPluse);
u8 motorGoHome(void);
/
* 函 数 名: PSC_Updata
* 功能说明: 以电机速度更新对应TIM1的PSC值(定时器预分频系数),等效于设置电机速度,MotorSpeed越大,PSC越小,定时器计数频率越大
* 形 参:MotorSpeed:电机速度,单位:r/min
* 返 回 值: 无
/
void PSC_Updata(u16 MotorSpeed)
{u16 psc = 0,freq = 0;freq = (MotorSpeed*16000) /60;//电机运动频率psc = (720000/freq) - 1;TIM_PrescalerConfig(TIM1,psc,TIM_PSCReloadMode_Update);//更新定时器1预分频系数PSC值return;
}
/
* 函 数 名: motorSpeedControl函数
* 功能说明: 电机输出控制函数,控制电机加减速
* 形 参:spped:电机速度,r/minmoveStep:电机运动步数Direction:电机运动方向
* 返 回 值: 无
/void motorSpeedControl(u16 spped,u16 moveStep,u8 Direction)
{u16 speed = 0;//实时速度u16 maxSpeed = spped;//设定最大速度u8 i=0; u8 RunStep = 0;//梯形运动过程记录gMotor_add_step = 0; //电机加速脉冲计数gMotor_sub_step = 0; //电机减速脉冲计数motorBrakeRelease(); //松开刹车pulseCount = 0;PSC_Updata(5); //更新定时器1预分频PSC值,电机加速阶段TIM_SetCompare1(TIM1,50);TIM_ITConfig(TIM1,TIM_IT_Update|TIM_IT_Trigger,ENABLE);//使能定时器1中断while(pulseCount < moveStep){//超出物理限制位置if((motorPosSensor == 0)&&(Direction == 1)){Uart1_Printf("Motor triager POS Limit.\\r\\n*_*"); TIM_SetCompare1(TIM1,0);TIM_ITConfig(TIM1,TIM_IT_Update | TIM_IT_Trigger, DISABLE);motorBrake; return;}if((motorNegSensor == 0)&&(Direction == 0)){Uart1_Printf("Motor triager NEG Limit.\\r\\n*_*"); TIM_SetCompare1(TIM1,0);TIM_ITConfig(TIM1,TIM_IT_Update | TIM_IT_Trigger, DISABLE);motorBrake; return;}/* 开始加、匀、减速度运动 */if(speed < maxSpeed - 5) //加速阶段{i+=2;delay_ms(400/(maxSpeed-5));if(speed >= maxSpeed) speed = maxSpeed;else speed += i;PSC_Updata(speed+2);//定时器}if((speed >= maxSpeed-5)&&(RunStep == 0) )//匀速阶段{RunStep = 1; speed = maxSpeed;gMotor_sub_step = gMotor_add_step = pulseCount; i = 0;}if(pulseCount >= moveStep - gMotor_sub_step) //减速阶段{if(speed > 5){i+=2;delay_ms(400/(maxSpeed-5));//在要求时间内跑到最小速度if(speed <= 5)speed=5;else speed -= i;PSC_Updata(speed);}}}TIM_SetCompare1(TIM1,0);TIM_ITConfig(TIM1,TIM_IT_Update | TIM_IT_Trigger, DISABLE);motorBrake;
}
/
* 函 数 名: motorDirSet
* 功能说明: 控制电机运动方向
* 形 参:moveStep:电机运动步数
* 返 回 值: 0-电机正向运动,1-电机反向运动
/
u8 motorDirSet(int moveStep)
{u8 dirFlag = 0;//电机运动方向标志位//设置电机运动方向if(moveStep > 0){SetMotorDirPos;}else{SetMotorDirNeg;moveStep = -moveStep;dirFlag = 1; //更新标志位}motorStep = moveStep;//motorSpeedControl(motorSpeed,moveStep);//更新电机运动脉冲if(dirFlag == 0){motorNewStep = motorNewStep + pulseCount;}else {motorNewStep = motorNewStep - pulseCount;}if(pulseCount >= moveStep)return 0;elsereturn 1;
}
/
* 函 数 名: motorGo
* 功能说明: 电机以目标速度启动
* 形 参:speed:电机速度值
* 返 回 值: 无
/
void motorGo(u16 speed)
{PSC_Updata(speed);//更新定时器1预分频PSC值,电机加速阶段TIM_SetCompare1(TIM1,50);//设置PWM占空比TIM_ITConfig(TIM1,TIM_IT_Update | TIM_IT_Trigger, ENABLE); //使能定时器1中断motorBrakeRelease;//松开电机刹车
}
/
* 函 数 名: GetPluseValue函数
* 功能说明: 从串口获取电机运动脉冲数
* 形 参:string:串口输入的字符串
* 返 回 值:0-电机反向运动,1-电机正向运动
/
u8 GetPluseValue(char *string)
{u8 motorDir;char *ptr = &string[16];g_MovePluse = atoi(ptr);motorNewStep += g_MovePluse;if(*ptr == '-'){g_MovePluse = -g_MovePluse;//把数值转换为正数motorDir = 0;}else{motorDir = 1; }return motorDir;
}
/
* 函 数 名: motorMovePluse
* 功能说明: 电机走指定脉冲
* 形 参:motorDir:1为正向,0为反向 MotorPluse:电机脉冲
* 返 回 值: 无
/
void motorMovePluse(u8 motorDir,int motorPluse)
{// motorDir只能是0或者1if(motorDir > 1) return;// motorSpeedControl(30,motorPluse);
// if(motorPluse > 200)
// motorGo(30);
// else
// motorGo(10); if(motorDir == 1) //电机正向运动{SetMotorDirPos; //设置电机正向运动pulseCount = 0; //脉冲计数清零motorSpeedControl(30,motorPluse,motorDir);//电机运动
// while((pulseCount <= motorPluse)&&(motorPosSensor == 1));
// TIM_SetCompare1(TIM1,0);
// TIM_ITConfig(TIM1,TIM_IT_Update | TIM_IT_Trigger, DISABLE); //使能定时器1中断
// motorBrake;
// Uart1_Printf("Motor MovePluse: +%5d\\r\\n*_*",motorPluse);
// Uart1_Printf("Motor now TotalPluse: %5d\\r\\n*_*",motorNewStep); return;}else{ //电机反向运动SetMotorDirNeg;pulseCount = 0;motorSpeedControl(30,motorPluse,motorDir);
// while((pulseCount <= motorPluse)&&(motorNegSensor == 1));
// TIM_SetCompare1(TIM1,0);
// TIM_ITConfig(TIM1,TIM_IT_Update | TIM_IT_Trigger, DISABLE); //使能定时器1中断
// motorBrake;
// Uart1_Printf("Motor MovePluse: -%5d\\r\\n*_*",motorPluse);
// Uart1_Printf("Motor now TotalPluse: %5d\\r\\n*_*",motorNewStep); return;}
}/
* 函 数 名: motorGoHome
* 功能说明: 电机回原点
* 形 参:无
* 返 回 值:0-回原点成功
/u8 motorGoHome(void)
{u8 motorPotionFlag = 0; //电机位置标志位,当motorPotionFlag为2时表示电机处于原点位置/* 电机不在正限位位置,先向上找到正限位 */if(motorPosSensor != 0){
// Uart1_Printf("Run step1.d\\r\\n*_*");motorBrakeRelease; //松开电机刹车SetMotorDirPos; //设置电机运动方向为正向pulseCount = 0; //脉冲计数清零motorStep = 50000;//预设一个较大的电机运动步数,电机会在该步数内走到传感器,否则就是传感器出问题motorGo(30);//电机以速度30开始运动//先找到上极限while((pulseCount <= motorStep)&&(motorPosSensor == 1));//等待电机走到正限位//电机向下找原点SetMotorDirNeg;motorGo(20);pulseCount = 0; motorStep = 20000;while((pulseCount <= motorStep)&&(motorOriSensor == 1)); //等待电机走到原点位
// Uart1_Printf("Step 1 get Motor Ori Sta = %d\\r\\n*_*",motorOriSensor);motorPotionFlag = 2;}/* 电机已在正限位,电机向下找原点 */else {
// Uart1_Printf("Run step2.d\\r\\n*_*");SetMotorDirNeg;motorGo(20);pulseCount = 0;motorStep = 20000;while((pulseCount <= motorStep)&&(motorOriSensor == 1));
// {Uart1_Printf("Step 2 get Motor Ori Sta = %d\\r\\n*_*",motorOriSensor);} motorPotionFlag = 2;}TIM_SetCompare1(TIM1,0);//设置电机占空比为0,电机停止运动TIM_ITConfig(TIM1,TIM_IT_Update | TIM_IT_Trigger, DISABLE); //失能定时器1中断motorBrake; //电机刹车 /* 电机到原点后再慢速往下离开原点,再慢速返回 */if(motorPotionFlag == 2){
// Uart1_Printf("Run step3.d\\r\\n*_*");SetMotorDirNeg;motorGo(5);pulseCount = 0;motorStep = 2000;while(pulseCount <= motorStep&&(motorOriSensor == 0)); //等待电机离开原点位
// Uart1_Printf("Finish step3.d\\r\\n*_*"); //电机慢速返回原点SetMotorDirPos;motorGo(5);pulseCount = 0;motorStep = 2000;while(pulseCount <= motorStep&&(motorOriSensor == 1)); //等待电机离开原点位//让电机停止运动TIM_SetCompare1(TIM1,0);TIM_ITConfig(TIM1,TIM_IT_Update | TIM_IT_Trigger, DISABLE); ///失能定时器1中断motorBrake;motorPotionFlag=0;//电机回原点成功}gMotorPosSta = 0;return 0;
}
1.7.4.1 关于函数TIM_SetCompare1对电机运动的控制
交流步进电机内部有两组线圈(A+/A-,B+/B-),电机的运动需要轮番对两组线圈通电,每次通电,电机就运动一定的角度,这种交流电信号必须是50%占空比的方波信号,不然电机运动会发生紊乱,所以需要电机正常运动,就需要把PWM信号的占空比设为50%,TIM_SetCompare1(TIM1,50);,反之要电机停止运动,就把PWM信号的占空比设为0;而电机的运动速度则通过PWM信号的频率决定,频率越高,电机转速越快;
- 函数原型:
/* @brief Sets the TIMx Capture Compare1 Register value,设置TIMx Capture Compare1寄存器值* @param TIMx: where x can be 1 to 17 except 6 and 7 to select the TIM peripheral.TIMx: x可以是1到17,除了6和7,以选择TIM外围设备。* @param Compare1: specifies the Capture Compare1 register new value.Compare1:指定捕获的Compare1寄存器新值。* @retval None*/
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1)
{/* Check the parameters */assert_param(IS_TIM_LIST8_PERIPH(TIMx));/* Set the Capture Compare1 Register value */TIMx->CCR1 = Compare1;
}
1.7.5 PWM信号控制led
函数索引:
void ledUpdataFrequence(u16 frequence);
void ledPwmControl(u8 ledNubmer,u8 status,u8 showOption);
/
* 函 数 名: ledUpdataFrequence
* 功能说明: 更新led PWM信号 PSC预分频系数
* 形 参:frequence:PWM信号频率,frequence越大,PSC越小,定时器计数频率越大
* 返 回 值: 无
* 修改日期:2020-5-7
/
void ledUpdataFrequence(u16 frequence)
{u16 psc = 0; psc = (720000/frequence) - 1;TIM_PrescalerConfig(TIM1,psc,TIM_PSCReloadMode_Update);//更新定时器1预分频系数PSC值return;
}
/
* 函 数 名: ledPwmControl
* 功能说明: 以PWM信号控制LED灯
* 形 参:ledNubmer:led编号,0: ALS1, 1: ALS2, 2: ALS3 status:led状态showOption:是否回显结果
* 返 回 值: 无
* 修改日期:2020-5-7
/
void ledPwmControl(u8 ledNubmer,u8 status,u8 showOption)
{ledUpdataFrequence(ALS_freq);//更新led PWM信号频率if(ledNubmer ==1){if(status == ON){TIM_SetCompare2(TIM1,100-ALS1_duty);//设置定时器2 PWM信号占空比}else{TIM_SetCompare2(TIM1,100);}}else if(ledNubmer == 2){if(status == 1){TIM_SetCompare4(TIM1,100-ALS2_duty);}else{TIM_SetCompare4(TIM1,100);}}if(showOption == 1){Uart1_Printf("Led set pass\\r\\n*_*");}
}
1.7.6 PWM信号控制LED闪烁
// 设置PWM的频率于占空比
int CalculateFrequencyPWM(uint32_t freq,uint32_t duty)
{ uint8_t i;
// uint16_t ck;double dt=0.0,dd=0.0,ck;//PortInfom *pb=&InOutMessage;dd=72000000; if(state.hawking_f==1){dt=((double)freq);}//1mm=360脉冲 (1mm=360Hz) else{dt=(double)freq;}i=0; //步进电机一圈为 10mm(3600脉冲 Hz)ck=0.0;do {i++; //取出分频系数ck=dd/dt;ck=ck/(double)i; }while(ck>60000.0);if(i>=1){i=i-1;}dt=ck*((double)duty)/100;TIM4InitilToMotorPWM(i,ck,dt);return 0;
}void TIM4InitilToMotorPWM(unsigned char divfreq, unsigned int CouVal, unsigned int ButyCycle)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;GPIO_InitTypeDef GPIO_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; //定义数据结构体 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能TIM4的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);TIM_DeInit(TIM4); //复位时钟TIM2,恢复到初始状态GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 ; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //配置为复用GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);
// GPIO_PinRemapConfig(GPIO_Remap_TIM4 , DISABLE); //禁止映射/*-------------------------------------------------------------------TIM3CLK=72MHz 预分频系数Prescaler=2 经过分频 定时器时钟为24MHz根据公式 通道输出占空比=TIM4_CCR2/(TIM_Period+1),可以得到TIM_Pulse的计数值 捕获/比较寄存器2 TIM4_CCR2= CCR1_Val T= fCK/TIM_Prescaler-1/TIM_Period -------------------------------------------------------------------*/TIM_TimeBaseStructure.TIM_Prescaler = divfreq; //预分频器TIM4_PSC=3 计数器的时钟频率CK_CNT等于fCK_PSC/(PSC[15:0]+1)。TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器向上计数模式 TIM4_CR1[4]=0TIM_TimeBaseStructure.TIM_Period = CouVal; //自动重装载寄存器TIM4_APR 确定频率为1KHz TIM_TimeBaseStructure.TIM_ClockDivision = 0x0; //时钟分频因子 TIM4_CR1[9:8]=00TIM_TimeBaseStructure.TIM_RepetitionCounter = 0x0;TIM_TimeBaseInit(TIM4,&TIM_TimeBaseStructure); //写TIM4各寄存器参数TIM_ClearFlag(TIM4,TIM_IT_Update); //清标示位TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE); //更新中断 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM模式2 TIM4_CCMR1[14:12]=111 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为有效电平 //TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输入/捕获2输出允许 OC2信号输出到对应的输出引脚PD13TIM_OCInitStructure.TIM_Pulse = ButyCycle; //确定占空比,这个值决定了有效电平的时间。TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性 TIM4_CCER[5]=1;
// TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable;TIM_OC3Init(TIM4,&TIM_OCInitStructure); TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); // NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0); //将中断矢量放到Flash的0地址NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4); //设置优先级配置的模式, NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //使能中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //将结构体丢到配置函数,即写入到对应寄存器中/* TIM4禁止使能 */TIM_Cmd(TIM4,ENABLE);TIM_CtrlPWMOutputs(TIM4, ENABLE); }
2. 时钟
时钟系统是CPU的脉搏,决定cpu速率,是CPU正常工作的时间基准。STM32使用任何外设都需要先启动时钟才能使用,但并不是所有的外设都需要用到系统时钟那么高的频率,如果都用高速时钟,必造成能耗浪费,且同一个电路,时钟越快不但功耗越大,同时抗电磁干扰能力也越弱,所以较为复杂的MCU都是采用多时钟源的方法来解决这些问题。对不同模块的时钟增加开启和关闭功能,可以降低单片机的功耗。
默认状态下,单片机把所有的外设时钟配置为失能(disable),用到哪个外设,就打开对应外设的时钟即可。
2.1 STM32F1系列时钟系统框图
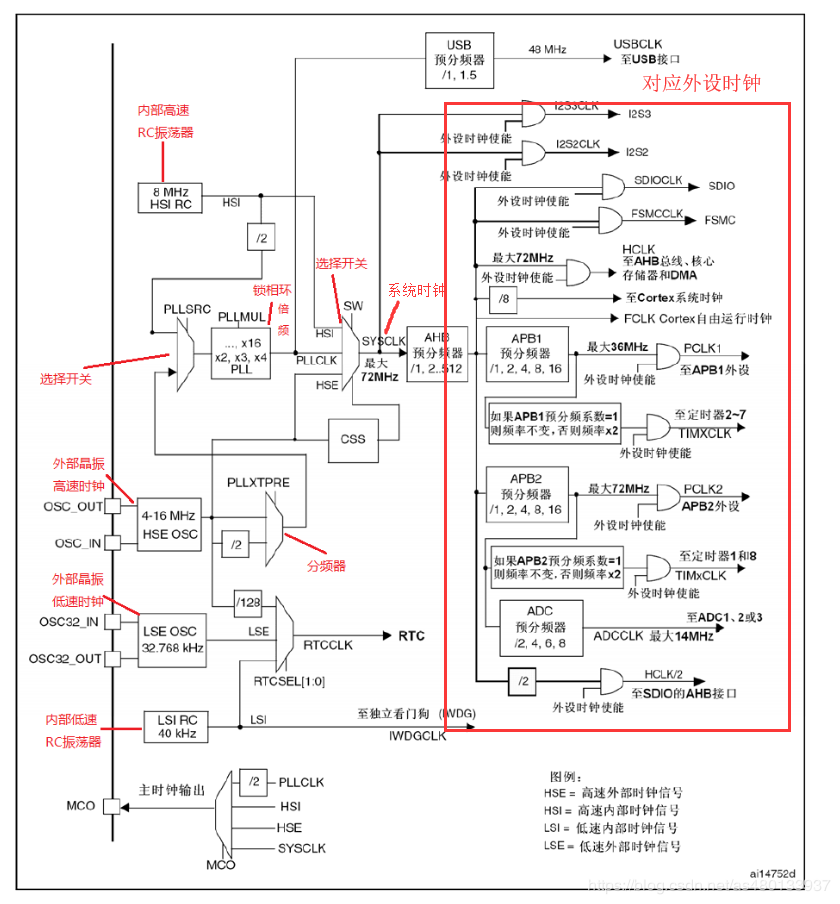
系统时钟SYSCLK的左边 是设置系统时钟选择哪个作为时钟源。系统时钟SYSCLK 的右边,是系统时钟通过AHB预分频器,给对应的外设设置对应的时钟频率 。
从左到右可以简单理解为 :各个时钟源—>系统时钟来源的设置—>各个外设时钟的设置。
2.2 时钟源
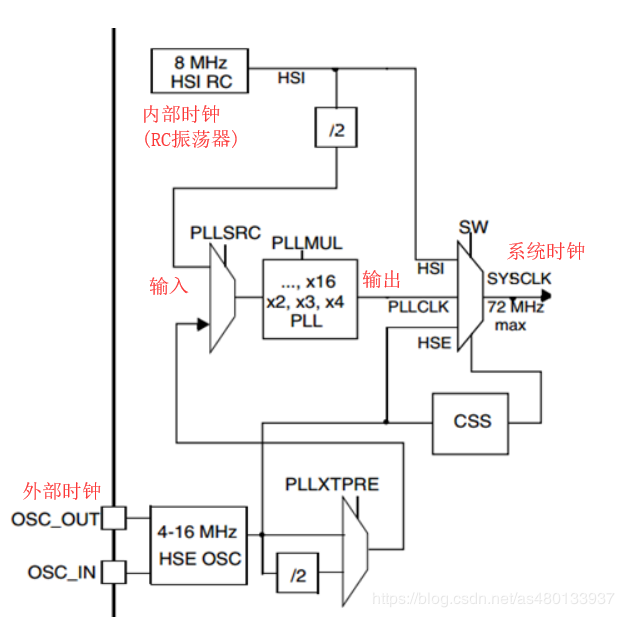
即图中系统时钟SYSCLK的左边 部分,STM32 有4个独立时钟源:HSI、HSE、LSI、LSE:
- HSI高速内部时钟:RC振荡器,频率为8MHz,精度不高。
- HSE高速外部时钟:可接石英/陶瓷谐振器,或者接外部时钟源,频率范围为4MHz~16MHz。
- LSI低速内部时钟:RC振荡器,频率为40kHz,提供低功耗时钟。一般作为IWDGCLK(独立看门狗)时钟源和RTC时钟源而独立使用。
- LSE低速外部时钟:接频率为32.768kHz的石英晶体。
除LSI外,其他三个时钟源都可以过分频者倍频作为系统时钟来使用。
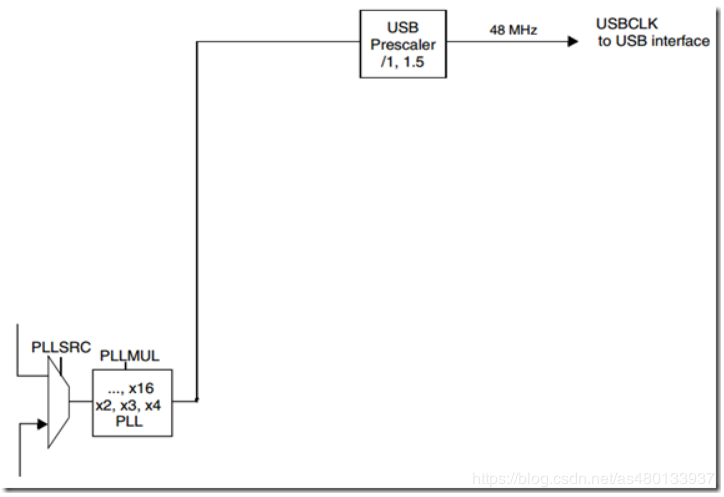
PLL锁相环倍频输出:其时钟输入源可选择为HSI/2、HSE或者HSE/2。倍频可选择为2~16倍,但是其输出频率最大不得超过72MHz。Keil编写程序时默认的时钟为72Mhz,是因为外部晶振(HSE)提供的8MHz(与电路板上的晶振的相关)通过PLLXTPRE分频器后,进入PLLSRC选择开关,进而通过PLLMUL锁相环进行倍频(x9)后,为系统提供72MHz的系统时钟(SYSCLK)。然后AHB预分频器对时钟信号进行分频,为低速外设提供时钟。但也可以是内部RC振荡器(HSI) 为8MHz/2 =4MHz进入PLLSRC选择开关*,通过PLLMUL锁相环进行倍频(x18)后为72MHz。
2.3 系统时钟SYSCLK
从4.2节知,系统时钟SYSCLK来源于三个时钟源:
①、HSI振荡器时钟
②、HSE振荡器时钟
③、LSE振荡器时钟
系统时钟SYSCLK最大为72MHz.
2.4 USB 时钟
STM32中有一个全速功能的USB模块,其串行接口引擎需要一个频率为48MHz的时钟源。该时钟源只能从PLL输出端获取。其分频系数可选择为1.5分频或者1分频,即当需要使用USB模块时,PLL必须使能,且时钟频率只能配置为48MHz或72MHz。
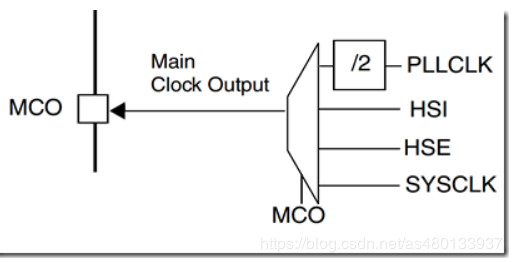
2.5 时钟输出
STM32可选择一个时钟信号输出到MCO引脚(GPIO)上供外部使用。
2.6 系统时钟通过AHB分频器给外设提供时钟
从4.1节的时钟系统框图中右边知,外设时钟从左到右依次为:系统时钟—>AHB分频器—>各个外设分频倍频器 —> 外设时钟的设置。AHB分频器可选择1、2、4、8、16、64、128、256、512分频。其中AHB分频器输出的时钟送给5大模块使用:
- 内核总线:送给AHB总线、内核、内存和DMA使用的HCLK时钟。
- Tick定时器:通过8分频后送给Cortex的系统定时器时钟。
- I2S总线:直接送给Cortex的空闲运行时钟FCLK。
- APB1外设:送给APB1分频器。APB1分频器可选择1、2、4、8、16分频,其输出一路供APB1外设使用(PCLK1,最大频率36MHz),另一路送给通用定时器使用。该倍频器可选择1或者2倍频,时钟输出供定时器2-7使用。
- APB2外设:送给APB2分频器。APB2分频器可选择1、2、4、8、16分频,其输出一路供APB2外设使用(PCLK2,最大频率72MHz),另一路送给高级定时器。该倍频器可选择1或者2倍频,时钟输出供定时器1和定时器8使用。另外,APB2分频器还有一路输出供ADC分频器使用,分频后送给ADC模块使用。ADC分频器可选择为2、4、6、8分频。
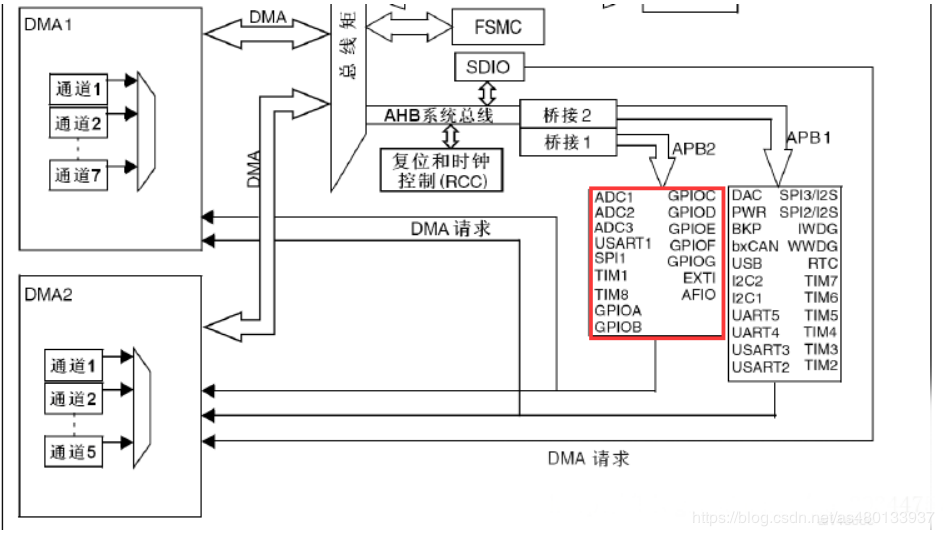
2.6.1 APB1和APB2对应的外设(F1系列)
- APB1上面连接的是低速外设,包括电源接口、备份接口、CAN、USB、I2C1、I2C2、USART2、USART3、UART4、UART5、SPI2、SP3等;
- APB2上面连接的是高速外设,包括UART1、SPI1、Timer1、ADC1、ADC2、ADC3、所有的普通I/O口(PA-PE)、第二功能I/O(AFIO)口等。
2.7 RCC相关寄存器(F1系列)
//RCC 寄存器结构,RCC_TypeDeff,在文件“stm32f10x.h”中定义如下:
//1059行->1081行:
typedef struct
{
vu32 CR; //HSI,HSE,CSS,PLL等的使能
vu32 CFGR; //PLL等的时钟源选择以及分频系数设定
vu32 CIR; // 清除/使能 时钟就绪中断
vu32 APB2RSTR; //APB2线上外设复位寄存器
vu32 APB1RSTR; //APB1线上外设复位寄存器
vu32 AHBENR; //DMA,SDIO等时钟使能
vu32 APB2ENR; //APB2线上外设时钟使能
vu32 APB1ENR; //APB1线上外设时钟使能
vu32 BDCR; //备份域控制寄存器
vu32 CSR;
} RCC_TypeDef;
2.8 RCC初始化
以HSE(高速外部时钟)为例(实际应用中使用HSE最多),使用HSE时钟,程序设置时钟参数流程:
- 将RCC寄存器重新设置为默认值 RCC_DeInit;
- 打开外部高速时钟晶振HSE RCC_HSEConfig(RCC_HSE_ON);
- 等待外部高速时钟晶振工作 HSEStartUpStatus = RCC_WaitForHSEStartUp();
- 设置AHB时钟 RCC_HCLKConfig;
- 设置高速AHB时钟 RCC_PCLK2Config;
- 设置低速速AHB时钟 RCC_PCLK1Config;
- 设置PLL RCC_PLLConfig;
- 打开PLL RCC_PLLCmd(ENABLE);
- 等待PLL工作 while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
- 设置系统时钟 RCC_SYSCLKConfig;
- 判断是否PLL是系统时钟 while(RCC_GetSYSCLKSource() != 0x08)
- 打开要使用的外设时钟 RCC_APB2PeriphClockCmd()/RCC_APB1PeriphClockCmd()
//使用外部8MHz晶振
//系统时钟72MHz,APH 72MHz,APB2 72MHz,APB1 32MHz,USB 48MHz TIMCLK=72M
void RCC_Configuration(void)
{//----------使用外部RC晶振-----------RCC_DeInit(); //初始化为缺省值RCC_HSEConfig(RCC_HSE_ON); //使能外部的高速时钟 while(RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET); //等待外部高速时钟使能就绪FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); //Enable Prefetch BufferFLASH_SetLatency(FLASH_Latency_2); //Flash 2 wait stateRCC_HCLKConfig(RCC_SYSCLK_Div1); //HCLK = SYSCLKRCC_PCLK2Config(RCC_HCLK_Div1); //PCLK2 = HCLKRCC_PCLK1Config(RCC_HCLK_Div2); //PCLK1 = HCLK/2RCC_PLLConfig(RCC_PLLSource_HSE_Div1,RCC_PLLMul_9); //PLLCLK = 8MHZ * 9 =72MHZRCC_PLLCmd(ENABLE); //Enable PLLCLKwhile(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); //Wait till PLLCLK is readyRCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); //Select PLL as system clockwhile(RCC_GetSYSCLKSource()!=0x08); //Wait till PLL is used as system clock source//---------打开相应外设时钟--------------------RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能APB2外设的GPIOA的时钟
}