
基于CH32F203利用TIM1 同时输出4通道固定PWM占空比波形
- 📌相关篇《关于CH32F203程序下载方式说明》
- 📍有关CH32F203资料手册以及SDK资料:
https://www.wch.cn/products/CH32F103.html
- 🌴《树莓派RP2040 100M 24通道逻辑分析仪开源项目》
- ✨虽然CH32F203和STM32F103重合度很高,但是在程序上有些外设还是不能兼容。外设的使用还是可以参考资料丰富的STM32来开发或学习使用。从对应提供的接口API函数来看,基本都是照搬的。
- 🔖本案例是基于官方提供SDK资料中的单路PWM输出例程中新增的多通道PWM输出。
-
- 🎈原案例:
CH32F20xEVT\\EVT\\EXAM\\TIM\\PWM_Output
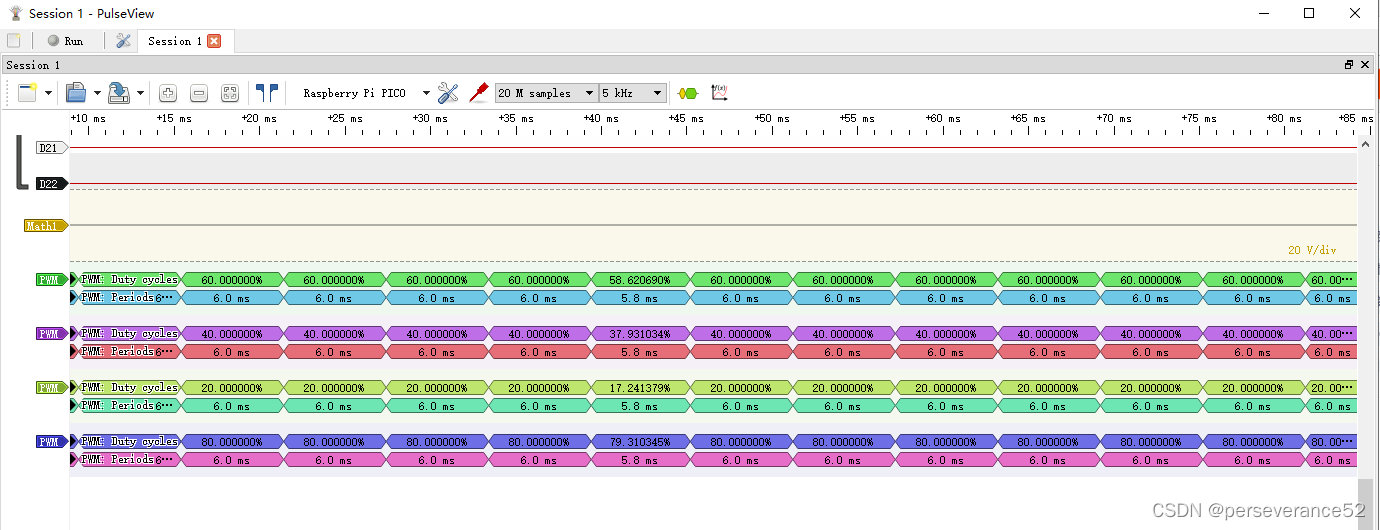
- 🎞4通道输出PWM波形
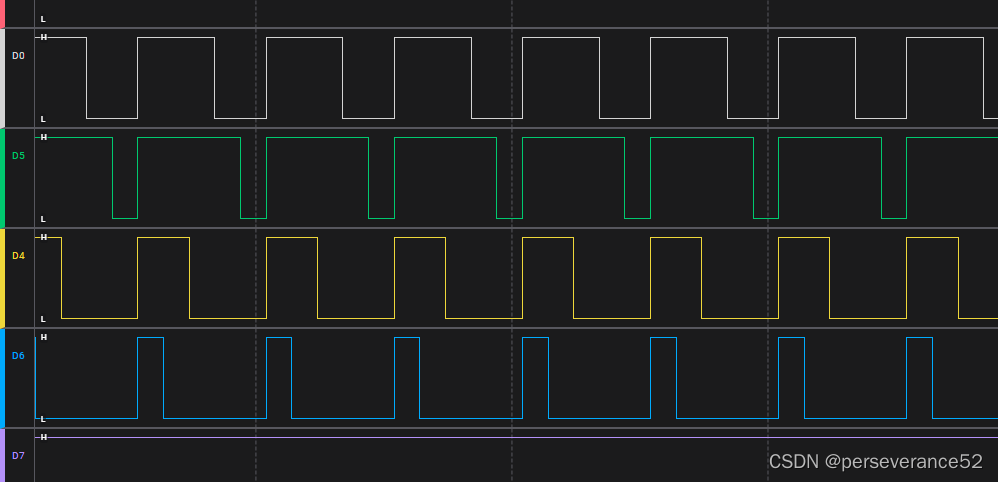

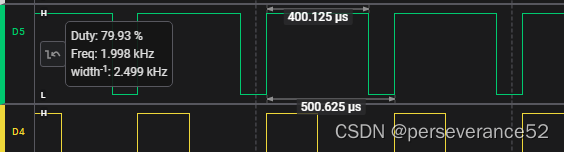
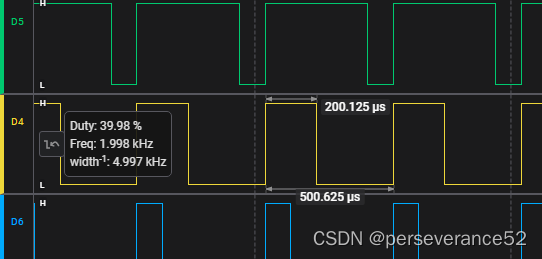

- 🎉使用RP2040开源的逻辑分析仪,使用免费上位机软件
PulseView参考pwm波形脉宽
📑多通道配置
- ✨如果想对每个通道单独进行初始化配置,可以将下面的函数分开来写。
void TIM1_PWMOut_Init(u16 arr, u16 psc, u16 ccp)
{GPIO_InitTypeDef GPIO_InitStructure = {0};TIM_OCInitTypeDef TIM_OCInitStructure = {0};TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure = {0};RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1, ENABLE);GPIO_InitStructure.GPIO_Pin = (uint16_t)(GPIO_Pin_11 | GPIO_Pin_10 | GPIO_Pin_9| GPIO_Pin_8);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseInitStructure.TIM_Period = arr;TIM_TimeBaseInitStructure.TIM_Prescaler = psc;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);#if (PWM_MODE == PWM_MODE1)TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;#elif (PWM_MODE == PWM_MODE2)TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;#endifTIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = ccp;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OC1Init(TIM1, &TIM_OCInitStructure);TIM_OC2Init(TIM1, &TIM_OCInitStructure);TIM_OC3Init(TIM1, &TIM_OCInitStructure);TIM_OC4Init(TIM1, &TIM_OCInitStructure);TIM_CtrlPWMOutputs(TIM1, ENABLE);TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Disable);TIM_ARRPreloadConfig(TIM1, ENABLE);TIM_Cmd(TIM1, ENABLE);
}
📝main主函数
- 🔰由于通道2在PA9引脚上,不能开启串口1,否则该引脚无法输出波形。
int main(void)
{
TIM1_PWMOut_Init(1000, 48 - 1, 500); TIM_SetCompare1(TIM1, 800); TIM_SetCompare2(TIM1, 600); TIM_SetCompare3(TIM1, 400); TIM_SetCompare4(TIM1, 200); while(1);
}
📓如果项通过其他定时器实现多通道PWM输出功能,原理一样可以照搬,如果想调节每一路的占空比输出,需要补充对应的函数以及关联变量即可实现。
📚程序源码
链接: https:
提取码: 4s9d