HybridFusion: LiDAR和视觉交叉源点云融合
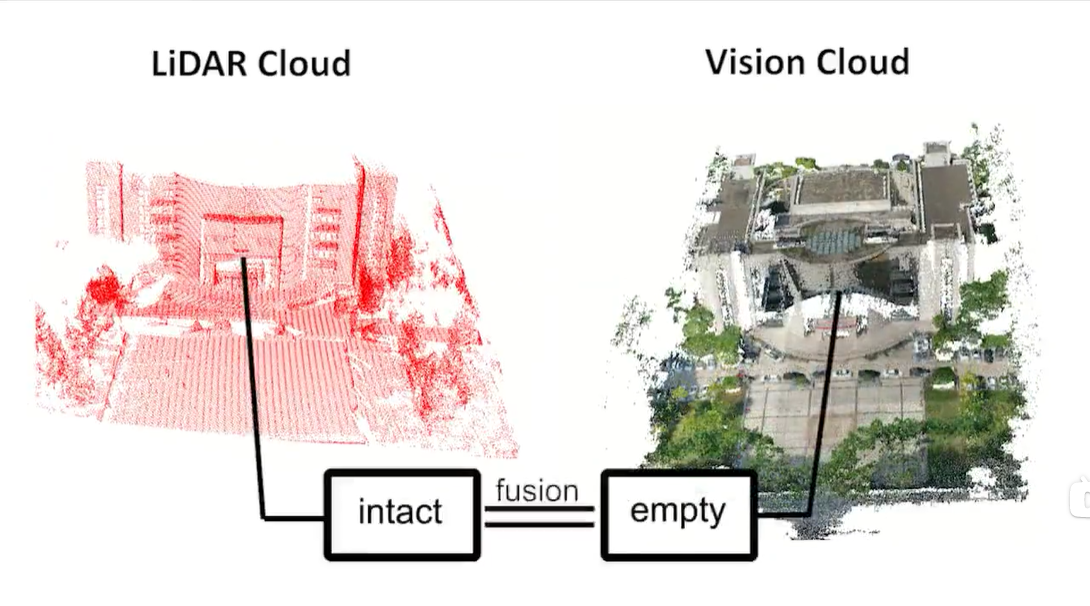
嘿,你是不是也在为户外大型场景的点云配准头疼?HybridFusion这玩意儿,简直就是点云界的“混血王子”,它能把LiDAR和视觉的数据揉在一起,搞出个“交叉源”密集点云,听起来是不是很酷?
问题来了:传统的GICP方法为啥不行?因为它像“大锅饭”一样,整个点云一起上,结果间隙匹配出错,房顶都能配歪了,你说这得多尴尬?
解决方法:HybridFusion聪明得很,它把点云切成“面片”,用全局描述符和空间分布来配准,最后二维边界点一调,完美融合。
思考一下:这技术不仅能解决点云配准问题,还能为自动驾驶、智慧城市等地方提供支持。你还能想到啥应用场景?无人机测绘?还是虚拟现实?赶紧脑洞大开吧!

一、基本信息
研究方向: 大场景点云配准
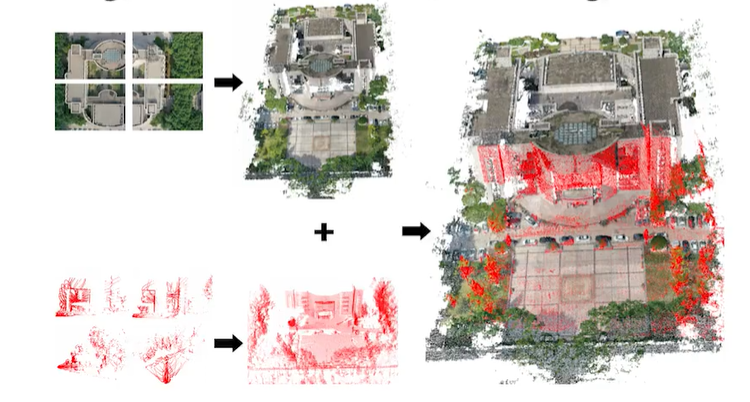
HybridFusion: 它可以在户外大型场景中从不同视角记录交叉源密集点云。
团队链接:http://www.adv-ci.com
视频链接: https://www.bilibili.com/video/BV1vM41147yD/?spm_id_from=333.337.search-card.all.click&vd_source=88bceb64b89804ec0cf90b2e004bf688
二、与现有方法对比
2.1 GICP方法使用整个点云进行配准,这会由于间隙匹配而导致全局配准错误。
2.1.1 房顶上面点云错位

2.2 作者方法
我们的算法通过以下方法实现注册:
将点云分割为面片
全局描述符
空间分布
二维边界点
三、处理流程 pipeline
3.1 GNSS位置(融合)
3.2激光雷达补丁
3.3 视觉补丁集选择
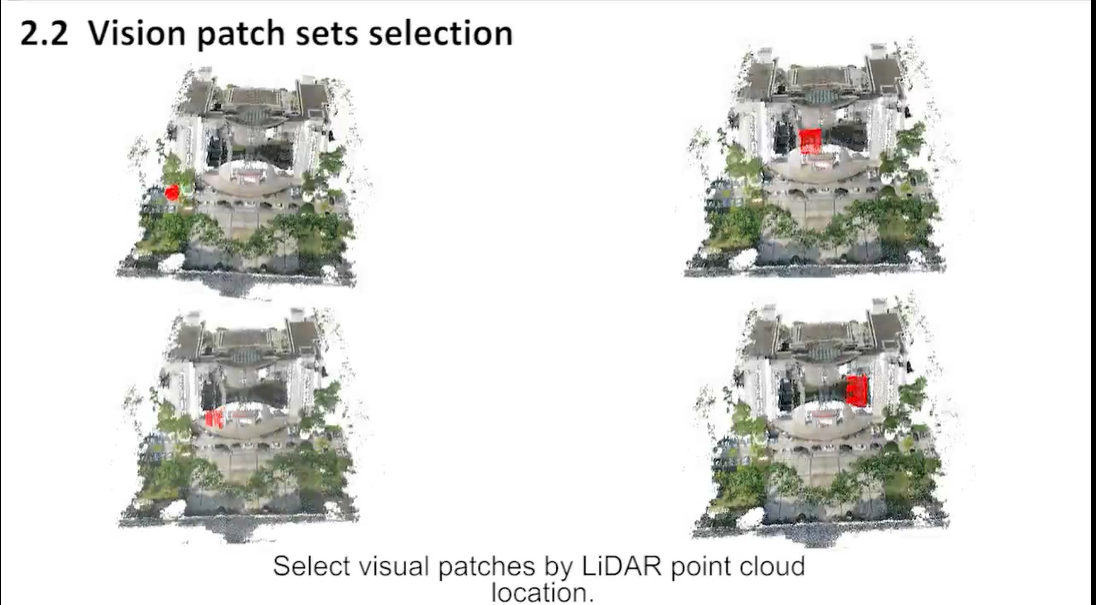
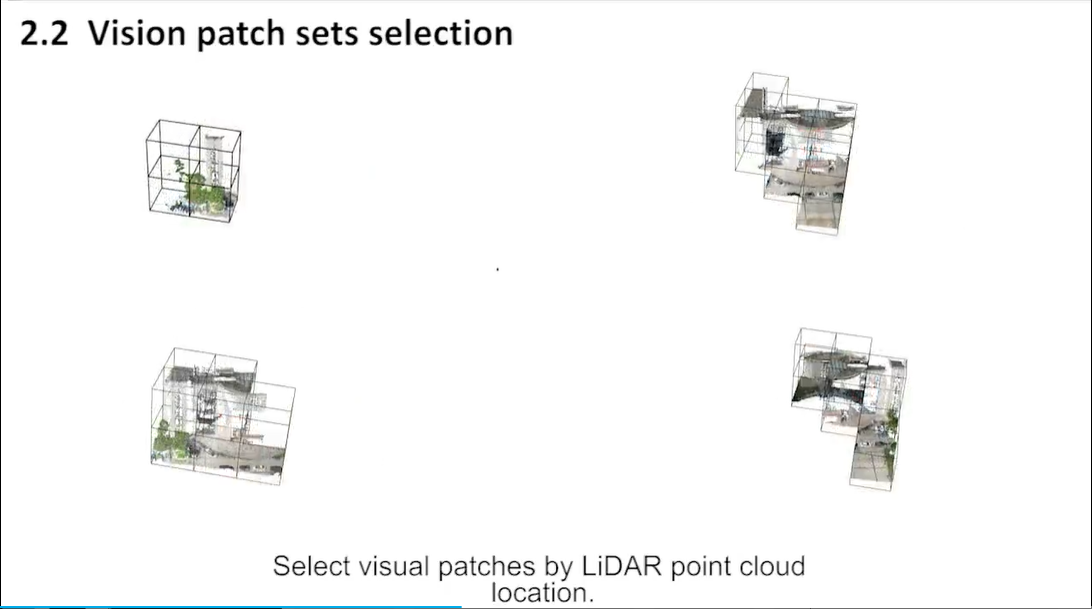
3.4 按描述符(ESF descriptors)过滤可视面片集
3.5 按邻居过滤可视面片集
二维边界点配准
三维面片配准与融合