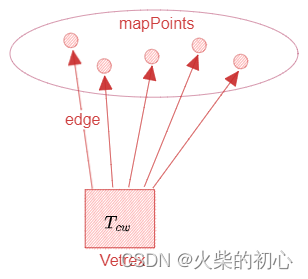
PoseOptimization主要的作用是利用重投影优化单帧的位姿,主要用在Tracking的几种跟踪模式TrackWithMotionModel、TrackReferenceKeyFrame、 TrackLocalMap、Relocalization中
PoseOptimization
Tracking
TrackWithMotionModel
TrackReferenceKeyFrame
TrackLocalMap
Relocalization
//创建优化器 g2o::SparseOptimizer optimizer; g2o::BlockSolver_6_3