面试题

用 C++写一个函数,交换两个整型变量
int a = 5, b = 10;
cout << "Before swapping: a = " << a << ", b = " << b << endl;
swapVars<int>(a, b);
cout << "After swapping: a = " << a << ", b = " << b << endl;double c = 1.23, d = 4.56;
cout << "Before swapping: c = " << c << ", d = " << d << endl;
swapVars<double>(c, d);
cout << "After swapping: c = " << c << ", d = " << d << endl;
用 c++语言,实现先进先出的队列
#include <iostream>using namespace std;// 定义队列节点结构体
struct Node {int val; // 节点值Node* next; // 指向下一个节点的指针// 构造函数Node(int val): val(val), next(nullptr) {}
};// 定义链式队列
class Queue {
private:Node* head; // 队首指针Node* tail; // 队尾指针public:// 构造函数Queue(): head(nullptr), tail(nullptr) {}// 判断队列是否为空bool isEmpty() {return (head == nullptr);}// 入队操作void enqueue(int val) {Node* node = new Node(val);if (isEmpty()) {head = node;tail = node;} else {tail->next = node;tail = node;}}// 出队操作int dequeue() {if (isEmpty()) {return -1;}int val = head->val;Node* temp = head;head = head->next;delete temp;return val;}// 获取队首元素int front() {if (isEmpty()) {return -1;}return head->val;}// 获取队列长度int size() {int count = 0;Node* cur = head;while (cur) {count++;cur = cur->next;}return count;}
};int main() {// 创建一个空队列Queue q;// 将元素依次加入队列q.enqueue(1);q.enqueue(2);q.enqueue(3);q.enqueue(4);q.enqueue(5);// 输出队列中的元素while (!q.isEmpty()) {cout << q.front() << " "; // 输出队首元素q.dequeue(); // 弹出队首元素}cout << endl;return 0;
}
用 c++语言,实现二叉树基本操作。
#include <iostream>using namespace std;// 定义二叉树节点结构体
struct TreeNode {int val; // 节点值TreeNode* left; // 左子节点指针TreeNode* right; // 右子节点指针// 构造函数TreeNode(int val): val(val), left(nullptr), right(nullptr) {}
};// 创建二叉树
TreeNode* createTree() {int val;cin >> val;if (val == -1) { // 输入-1表示空节点return nullptr;}TreeNode* node = new TreeNode(val);node->left = createTree(); // 递归创建左子树node->right = createTree(); // 递归创建右子树return node;
}// 先序遍历
void preOrder(TreeNode* root) {if (root) {cout << root->val << " "; // 输出节点值preOrder(root->left); // 递归遍历左子树preOrder(root->right); // 递归遍历右子树}
}// 中序遍历
void inOrder(TreeNode* root) {if (root) {inOrder(root->left); // 递归遍历左子树cout << root->val << " "; // 输出节点值inOrder(root->right); // 递归遍历右子树}
}// 后序遍历
void postOrder(TreeNode* root) {if (root) {postOrder(root->left); // 递归遍历左子树postOrder(root->right); // 递归遍历右子树cout << root->val << " "; // 输出节点值}
}int main() {// 创建二叉树TreeNode* root = createTree();// 输出各种遍历结果cout << "先序遍历结果:";preOrder(root);cout << endl;cout << "中序遍历结果:";inOrder(root);cout << endl;cout << "后序遍历结果:";postOrder(root);cout << endl;return 0;
}
用 C++或 Python 实现观察者模式。
#include <iostream>
#include <vector>using namespace std;// 抽象主题类
class Subject {
public:virtual void attach(Observer* observer) = 0; // 添加观察者virtual void detach(Observer* observer) = 0; // 移除观察者virtual void notify() = 0; // 通知观察者
};// 具体主题类
class ConcreteSubject : public Subject {
private:vector<Observer*> observers; // 观察者列表int state; // 主题状态public:// 添加观察者void attach(Observer* observer) {observers.push_back(observer);}// 移除观察者void detach(Observer* observer) {for (auto it = observers.begin(); it != observers.end(); it++) {if (*it == observer) {observers.erase(it);break;}}}// 通知观察者void notify() {for (auto observer : observers) {observer->update(state);}}// 设置主题状态void setState(int state) {this->state = state;notify(); // 状态改变后通知观察者}
};// 抽象观察者类
class Observer {
public:virtual void update(int state) = 0; // 更新观察者状态
};// 具体观察者类
class ConcreteObserver : public Observer {
public:// 更新观察者状态void update(int state) {cout << "观察者收到主题状态更新,新状态为:" << state << endl;}
};int main() {ConcreteSubject* subject = new ConcreteSubject(); // 创建主题对象ConcreteObserver* observer1 = new ConcreteObserver(); // 创建观察者对象1ConcreteObserver* observer2 = new ConcreteObserver(); // 创建观察者对象2subject->attach(observer1); // 添加观察者1subject->attach(observer2); // 添加观察者2subject->setState(1); // 设置主题状态为1subject->detach(observer1); // 移除观察者1subject->setState(2); // 设置主题状态为2return 0;
}
# 抽象主题类
class Subject:def attach(self, observer):passdef detach(self, observer):passdef notify(self):pass# 具体主题类
class ConcreteSubject(Subject):def __init__(self):self.observers = [] # 观察者列表self.state = 0 # 主题状态# 添加观察者def attach(self, observer):self.observers.append(observer)# 移除观察者def detach(self, observer):self.observers.remove(observer)# 通知观察者def notify(self):for observer in self.observers:observer.update(self.state)# 设置主题状态def set_state(self, state):self.state = stateself.notify() # 状态改变后
思考一下,怎么抓住目标物体?
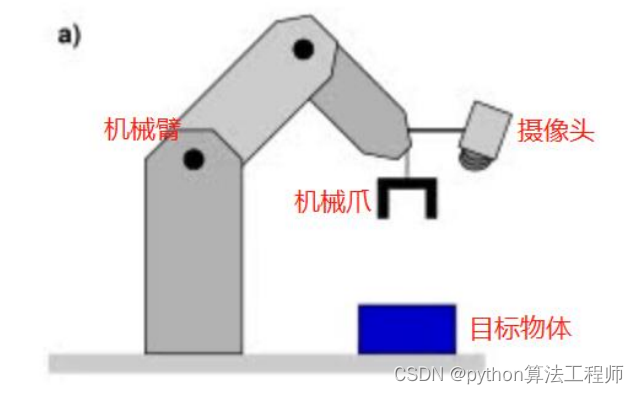
- 首先,使用摄像头获取机械臂下方物体的位置和姿态信息。
- 根据物体的位置和姿态信息,计算出机械臂末端的目标位置和姿态。
- 使用逆运动学求解机械臂需要移动的关节角度,使末端可以到达目标位置和姿态。由于机械臂有两个自由度,需要求解两个关节的角度。
- 将机械爪移动到末端,抓取物体
需要注意的是,机械臂的运动要考虑到安全性和稳定性,需要避免碰撞和过度运动造成的摆动。此外,还需要考虑机械臂和机械爪的精度和可靠性,以确保抓取成功率。
以下是一个基于ROS和MoveIt的Python代码示例,实现了一个2自由度机械臂的抓取任务。
i
mport rospy
import moveit_commander
from geometry_msgs.msg import PoseStamped# 初始化
rospy.init_node('pick_and_place')
robot = moveit_commander.RobotCommander()
group = moveit_commander.MoveGroupCommander('arm')
gripper = moveit_commander.MoveGroupCommander('gripper')# 设置目标位置和姿态
target_pose = PoseStamped()
target_pose.header.frame_id = 'base_link'
target_pose.pose.position.x = 0.4
target_pose.pose.position.y = 0.0
target_pose.pose.position.z = 0.1
target_pose.pose.orientation.x = 0.0
target_pose.pose.orientation.y = 0.0
target_pose.pose.orientation.z = 0.0
target_pose.pose.orientation.w = 1.0# 移动机械臂
group.set_pose_target(target_pose)
plan = group.plan()
group.execute(plan)# 打开机械爪
gripper.set_joint_value_target([0.04])
plan = gripper.plan()
gripper.execute(plan)# 移动机械爪到目标位置
target_pose.pose.position.z = 0.07
group.set_pose_target(target_pose)
plan = group.plan()
group.execute(plan)# 关闭机械爪
gripper.set_joint_value_target([0.0])
plan = gripper.plan()
gripper.execute(plan)# 移动机械臂回到初始位置
target_pose.pose.position.x = 0.0
target_pose.pose.position.y = 0.0
target_pose.pose.position.z = 0.2
group.set_pose_target(target_pose)
plan = group.plan()
group.execute(plan)
在这个示例代码中,我们使用了ROS和MoveIt来控制机械臂的运动。首先,我们初始化了ROS节点和MoveIt中的RobotCommander、MoveGroupCommander和GripperCommander。然后,我们设置了目标位置和姿态,将机械臂移动到目标位置。接下来,我们打开机械爪,将机械爪移动到目标位置,关闭机械爪,最后将机械臂移动回初始位置。