最大似然估计法和Zero Forcing算法的思考

文章目录
-
- 一、Zero Forcing 算法思想
- 二、MMSE
- 三、MIMO检测中 Zero Forcing 算法比 Maximum Likelihood 差的思考
本篇文章是学习了B站UP主
乐吧的数学 之后的笔记总结,老师讲的非常好,大家有兴趣的可以关注一波!
一、Zero Forcing 算法思想
那么 Maximum Likelihood(ML) 算法是最优的检测,这个最优指的是使错误率最低(假定发送的 x 是等概率出现的),从最低错误率的角度出发,同时假定在每个天线处的高斯白噪声是独立同分布的,那么,这个 ML 算法的公式为:
X^=argminX∈XMt∥Y−HX∥2(1)\\hat{X}=\\operatorname{argmin}_{X \\in \\mathcal{X}^{M_{t}}}\\|Y-H X\\|^{2}\\tag1X^=argminX∈XMt∥Y−HX∥2(1)
遍历 XXX 的所有可能取值,找到是公式 (1) 最小的。
因为公式 (1) 的计算量非常大,在实际中是不可行的。那么对公式 (1) 放开条件,让 X 的取值,不仅限于星座图中的值,而是任何值,那么,这个就是 zero forcing(ZF) 算法的出发点,则公式 (1) 就变成
X^=argminX∥Y−HX∥2(2)\\hat{X}=\\operatorname{argmin}_{X}\\|Y-H X\\|^{2}\\tag2X^=argminX∥Y−HX∥2(2)
注意 argmin 的下表中的 X ,没有做任何限制。公式 (2) 就是一个无约束的最优化问题,我们令:
f(X)=∥Y−HX∥2(3)f(X)=\\|Y-H X\\|^{2}\\tag3f(X)=∥Y−HX∥2(3)
接下来对公式 (3) 做进一步的推导(我们约定所有的向量都是列向量):
f(X)=∥Y−HX∥2=(Y−HX)H(Y−HX)=(YH−XHHH)(Y−HX)=YHY−YHHX−XHHHY+XHHHHX(4)\\begin{aligned} f(X) & =\\|Y-H X\\|^{2} \\\\ & =(Y-H X)^{H}(Y-H X) \\\\ & =\\left(Y^{H}-X^{H} H^{H}\\right)(Y-H X) \\\\ & =Y^{H} Y-Y^{H} H X-X^{H} H^{H} Y+X^{H} H^{H} H X \\end{aligned}\\tag4f(X)=∥Y−HX∥2=(Y−HX)H(Y−HX)=(YH−XHHH)(Y−HX)=YHY−YHHX−XHHHY+XHHHHX(4)
把公式 (4) 对 XXX 求导,公式 (4) 实际上是一个数,XXX 是一个向量,这个求导的过程,实际上就是对 (4) 用 XXX 的每个分量分别求一次导数并令其等于 0,得到 NNN ( 假如 XXX 是 NNN 维的列向量) 个方程,联合起来可以求解出 X 的每个分量。用矩阵形式来写就是
∂YHHX∂X=HHY\\frac{\\partial Y^{H} H X}{\\partial X}=H^{H} Y∂X∂YHHX=HHY
∂XHHHY∂X=HHY\\frac{\\partial X^{H} H^{H} Y}{\\partial X}=H^{H} Y∂X∂XHHHY=HHY
∂XHHHHX∂X=2HHHX\\frac{\\partial X^{H} H^{H} H X}{\\partial X}=2 H^{H} H X∂X∂XHHHHX=2HHHX
则
0−HHY−HHY+2HHHX=00-H^{H} Y-H^{H} Y+2 H^{H} H X=00−HHY−HHY+2HHHX=0
进一步推导
HHHX=HHYH^{H} H X=H^{H} YHHHX=HHY
最后:
X~=(HHH)−1HHY(5)\\tilde{X}=\\left(H^{H} H\\right)^{-1} H^{H} Y\\tag5X~=(HHH)−1HHY(5)
如果 HHH 是方阵且可逆,公式 (5) 可以写成:
X~=H−1(HH)−1HHY=H−1Y\\begin{aligned} \\tilde{X} & =H^{-1}\\left(H^{H}\\right)^{-1} H^{H} Y \\\\ & =H^{-1} Y \\end{aligned}X~=H−1(HH)−1HHY=H−1Y
这样得出的值,就是检测后的估计值,即用 Zero Forcing 算法估计出来的值。下面我们这个值用 X~\\tilde{X}X~ 来表示。
将 Y=HX+WY=H X+WY=HX+W 代入
X~=(HHH)−1HH(HX+W)=X+(HHH)−1HHW=X+H−1W=X+W~\\begin{aligned}\\tilde{X}&=\\left(H^{H} H\\right)^{-1} H^{H}(H X+W)\\\\ &=X+\\left(H^{H} H\\right)^{-1} H^{H} W\\\\ &=X+H^{-1}W\\\\ &=X+\\tilde{W} \\end{aligned}X~=(HHH)−1HH(HX+W)=X+(HHH)−1HHW=X+H−1W=X+W~
然后,再做解调检测
X^=argminX∈XMt∥X~−X∥2(7)\\begin{aligned} \\hat{X}=\\operatorname{argmin}_{X \\in \\mathcal{X}^{M_{t}}}\\|\\tilde{X}-X\\|^{2} \\end{aligned}\\tag7X^=argminX∈XMt∥X~−X∥2(7)
X∈XMtX \\in \\mathcal{X}^{M_{t}}X∈XMt 是因为输出信号是从 MtM_tMt 个天线中传输出来的信号。
我们将最大似然估计的算法拿下来比较一下
X^=argminX∈XMt∥Y−HX∥2\\hat{X}=\\operatorname{argmin}_{X \\in \\mathcal{X}^{M_{t}}}\\|Y-H X\\|^{2}X^=argminX∈XMt∥Y−HX∥2
会发现其实这是两种思想方法,一个是在发送信号端进行比较,一个是在接收端进行比较。同时误差的来源都是接收端附加的噪声 WWW。但是Zero Forcing的优越处在于 X~\\tilde{X}X~ 的值只要计算一次,就可以与 X∈XMtX \\in \\mathcal{X}^{M_{t}}X∈XMt 中的值进行比较,计算量会减小。
二、MMSE
G=(HHH+σ2I)−1HHG=\\left(H^{H} H+\\sigma^{2} I\\right)^{-1} H^{H}G=(HHH+σ2I)−1HH
即:
X~=GY=GHX+GW=(HHH+σ2I)−1HHHX+(HHH+σ2I)−1HHW\\tilde{X}=G Y=G H X+G W=\\left(H^{H} H+\\sigma^{2} I\\right)^{-1} H^{H} H X+\\left(H^{H} H+\\sigma^{2} I\\right)^{-1} H^{H} W X~=GY=GHX+GW=(HHH+σ2I)−1HHHX+(HHH+σ2I)−1HHW
噪声小的时候,应该类似于 Zero Forcing,当噪声比较大时,接近 Matched Filter。
这里有一个有趣的现象,当噪声比较小的时候,MMSE 还是比 ZF 要好。有人专门对这个现象进行了理论分析,感兴趣的可以去阅读文献:
Y. Jiang, M. K. Varanasi and J. Li, “Performance Analysis of ZF and MMSE Equalizers for MIMO Systems: An In-Depth Study of the High SNR Regime,” in IEEE Transactions on Information Theory, vol. 57, no. 4, pp. 2008-2026, April 2011, doi: 10.1109/TIT.2011.2112070.
三、MIMO检测中 Zero Forcing 算法比 Maximum Likelihood 差的思考
我们假设这里 HHH 是方阵并且是可逆的
X~=H−1Y\\tilde{X}=H^{-1} YX~=H−1Y
Zero Forcing 算法于是有:
X^=argminX∈XMt∥X~−X∥2=argminX∈XMt∥H−1Y−X∥2=argminX∈XMt∥H−1(Y−HX)∥2\\begin{aligned} \\hat{X} & =\\operatorname{argmin}_{X \\in \\mathcal{X}^{M_{t}}}\\|\\tilde{X}-X\\|^{2} \\\\ & =\\operatorname{argmin}_{X \\in \\mathcal{X}^{M_{t}}}\\left\\|H^{-1} Y-X\\right\\|^{2} \\\\ & =\\operatorname{argmin}_{X \\in \\mathcal{X}^{M_{t}}}\\left\\|H^{-1}(Y-H X)\\right\\|^{2} \\end{aligned}X^=argminX∈XMt∥X~−X∥2=argminX∈XMtH−1Y−X2=argminX∈XMtH−1(Y−HX)2
这里假定 HHH 是方阵且可逆的,则 HHH 的逆矩阵也可以做 SVDSVDSVD 分解:
H−1=UΣVHH^{-1}=U \\Sigma V^{H}H−1=UΣVH
则公式变为
∥H−1(Y−HX)∥2=∥UΣVH(Y−HX)∥2\\left\\|H^{-1}(Y-H X)\\right\\|^{2}=\\left\\|U \\Sigma V^{H}(Y-H X)\\right\\|^{2}H−1(Y−HX)2=UΣVH(Y−HX)2
我们把 看成一个向量,则矩阵 UUU 因为是单位正交矩阵,所以,是一个刚性旋转,不改变被作用的向量的长度,因此 公式可以继续推导为:
∥H−1(Y−HX)∥2=∥ΣVH(Y−HX)∥2\\left\\|H^{-1}(Y-H X)\\right\\|^{2}=\\left\\|\\Sigma V^{H}(Y-H X)\\right\\|^{2}H−1(Y−HX)2=ΣVH(Y−HX)2
公式 (8) 中,我们把 Y−HXY- HXY−HX 看成一个向量,记为 ZZZ,则 VHV^HVH 是对这个向量 ZZZ 做旋转,不改变向量长度,旋转后的向量记为 Z^\\hat{Z}Z^, 则矩阵 Σ\\SigmaΣ,是对向量各个分量进行缩放:
Σ=[λ1⋯λN]\\Sigma=\\left[\\begin{array}{lll} \\lambda_{1} & & \\\\ & \\cdots & \\\\ & & \\lambda_{N} \\end{array}\\right]Σ=λ1⋯λN
情况一: 所有特征值都相等
当 λ1=⋯=λN=λ\\lambda_{1}=\\cdots=\\lambda_{N}=\\lambdaλ1=⋯=λN=λ 时,公式可以写成:
∥H−1(Y−HX)∥2=∥ΣVH(Y−HX)∥2=∥λIVH(Y−HX)∥2=λ2∥VH(Y−HX)∥2\\left\\|H^{-1}(Y-H X)\\right\\|^{2}=\\left\\|\\Sigma V^{H}(Y-H X)\\right\\|^{2}=\\left\\|\\lambda I V^{H}(Y-H X)\\right\\|^{2}=\\lambda^{2}\\left\\|V^{H}(Y-H X)\\right\\|^{2}H−1(Y−HX)2=ΣVH(Y−HX)2=λIVH(Y−HX)2=λ2VH(Y−HX)2
因为 VHV^HVH 是单位正交的矩阵,因此,是一个刚性旋转,不改变后面向量的长度,因此公式可以写成:
∥H−1(Y−HX)∥2=λ2∥(Y−HX)∥2\\left\\|H^{-1}(Y-H X)\\right\\|^{2}=\\lambda^{2}\\|(Y-H X)\\|^{2}H−1(Y−HX)2=λ2∥(Y−HX)∥2
这种情况下, Zero Forcing 算法就与 Maximum Likelihood 算法的性能一致。
情况二:噪声非常小,趋近于 0
公式中,一定能找到一个 XXX 向量,使得 Y−HXY - HXY−HX 为 000 向量,因为是 000 向量,所以,这个就是最小值,不可能找到另外一个向量 X′X'X′ ,使得结果比 0 小。所以,在噪声为 000 的情况下,Zero Forcing 算法就与 Maximum Likelihood 算法的性能一致。
情况三:特征值不全都相等,也含有噪声
∥H−1(Y−HX)∥2=∥ΣVH(Y−HX)∥2=∥[λ1Z^1⋯λNZ^N]∥2=λ12∥Z^1∥2+⋯+λ1N∥Z^N∥2\\begin{aligned} \\left\\|H^{-1}(Y-H X)\\right\\|^{2} & =\\left\\|\\Sigma V^{H}(Y-H X)\\right\\|^{2} \\\\ & =\\left\\|\\left[\\begin{array}{c} \\lambda_{1} \\hat{Z}_{1} \\\\ \\cdots \\\\ \\lambda_{N} \\hat{Z}_{N} \\end{array}\\right]\\right\\|^{2} \\\\ & =\\lambda_{1}^{2}\\left\\|\\hat{Z}_{1}\\right\\|^{2}+\\cdots+\\lambda_{1}^{N}\\left\\|\\hat{Z}_{N}\\right\\|^{2} \\end{aligned}H−1(Y−HX)2=ΣVH(Y−HX)2=λ1Z^1⋯λNZ^N2=λ12Z^12+⋯+λ1NZ^N2
公式上面公式中第一个等号那里,相当于对向量 Y−HXY-HXY−HX 先做旋转,然后再在各个维度上做缩放,例如都是都是逆时针旋转一个固定角度,两个维度分别是放大三倍和缩小一倍(以二维向量为例子,方便画图理解),则不同的向量,即使长度相同,但是角度不同,经过旋转和缩放后,长度将会不同。
下图蓝色是初始向量,旋转后变成绿色向量,然后经过 X 轴放大3倍, Y 轴缩小 1/3 ,变成右边紫色向量。

从上面两个实例可以看出,旋转缩放前,第一个图的原始向量要比第二个图的原始向量要短,但是做了同样的旋转缩放后,第一个图的结果向量反而比第二个图的结果向量要长,可见,旋转缩放后,会改变向量长度的大小关系,进而影响 Zero Forcing 算法达不到 Maximum Likelihood 算法的效果,即可能找到的不是最优解。
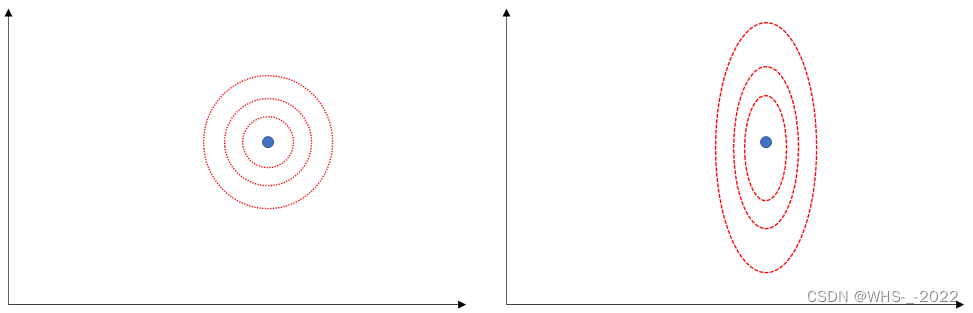
另一个直观的解释就是,接收端的噪声往往是各向同性的高斯噪声,经过 H−1WH^{-1}WH−1W 之后的噪声会变成各向异性的噪声,从而降低了系统性能。