ADAS-GPS定位原理概述

前言
“GPS传感器在无人机、室外物流车以及诸多机器人应用中经常出现,它们机器人的定位、导航中发挥着重要的作用,而今天的L2~L5级别自动驾驶系统更是离不开它们,今天我们走进它们的世界,探索其背后原理以及本质。”
GPS定位原理
“GPS的应用,仅受人们的想象力制约”,自GPS问世以来,已充分显示了其在导航定位领域的霸主地位,许多领域也由于GPS的出现而产生革命性变化,如航空航天、军事、工业、民用等地方,下面我们将揭开其神秘的面纱。
GPS(Global Positioning System)即全球定位系统,最早起源于美国的军事项目,美国的这种系统叫GPS。除了GPS外,中国也有自己北斗全球定位系统,俄罗斯有格洛纳斯导航系统,欧盟有自己的伽利略定位导航系统。但本质上,这些系统定位的原理都是一样的。除了定位之外,GPS还可以授时,即告诉你准确的时间点,也可以产生PPS(Pluse Per Second)信号用于多传感器的同步,下面我们介绍下其定位的基本原理。
对于一个地球上的物体而言,其在三维空间的坐标可以用(X,Y,Z)表示,另外加上一个时间维度T,这样就可以表示出在某个时间点T时物体的坐标(X,Y,Z)。而在卫星上,也有空间坐标信息(X1,Y1,Z1),同样也有一个准确的时间信息T1,同时卫星上的原子钟会不断校准更新自己的时间信息。卫星会不断的广播自己的坐标以及时间信息给GPS接收模块:
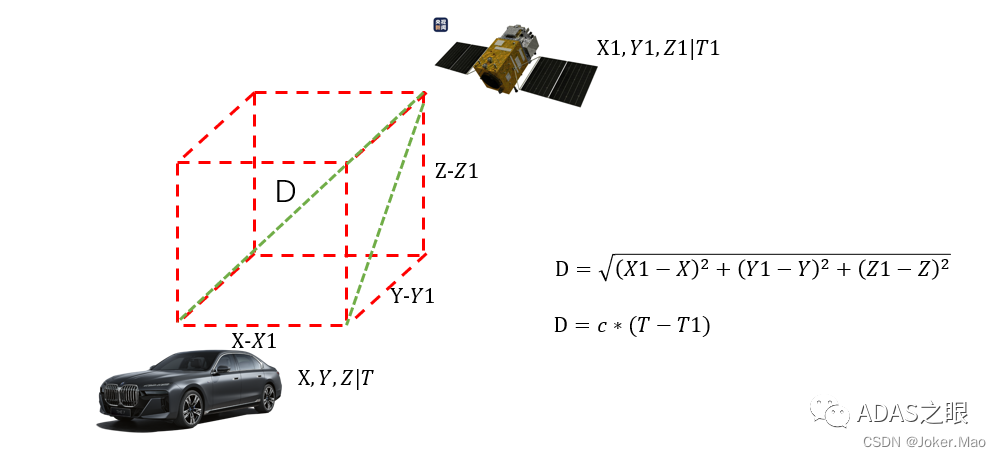
根据三角函数勾股定理可以得到卫星以及物体之间D与两个坐标之间的等式,另外根据光速以及时间差也可以得到D的等式,那么我们可以得到下述公式:

其中c是光速,可以看出式中有四个未知数,X、Y、Z、T,只有一个方程是无法解出的。四个未知数至少需要四组方程式,所以我们再多加三个卫星的数据便可以解出最终物体的坐标以及时间T,如下图所示:
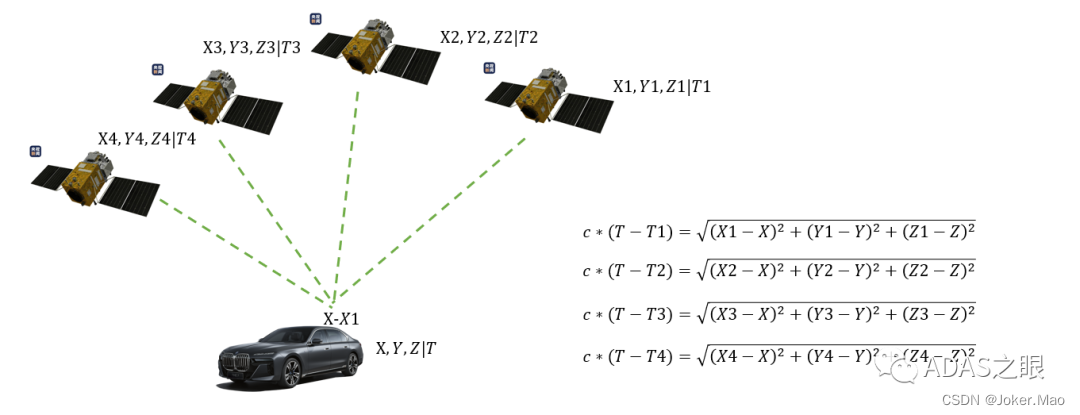
将一个物体定位至少需要4颗卫星,这也是为什么室外机器人如无人机、无人船在初始化过程中一定需要搜星且搜够足够数量的卫星的原因。
差分定位技术
由于大气湿度、电离干扰、多路径干扰等因素导致GPS信号在传输的时候干扰较多,因为光速很快,所以导致GPS的误差一般在几米甚至几十米。
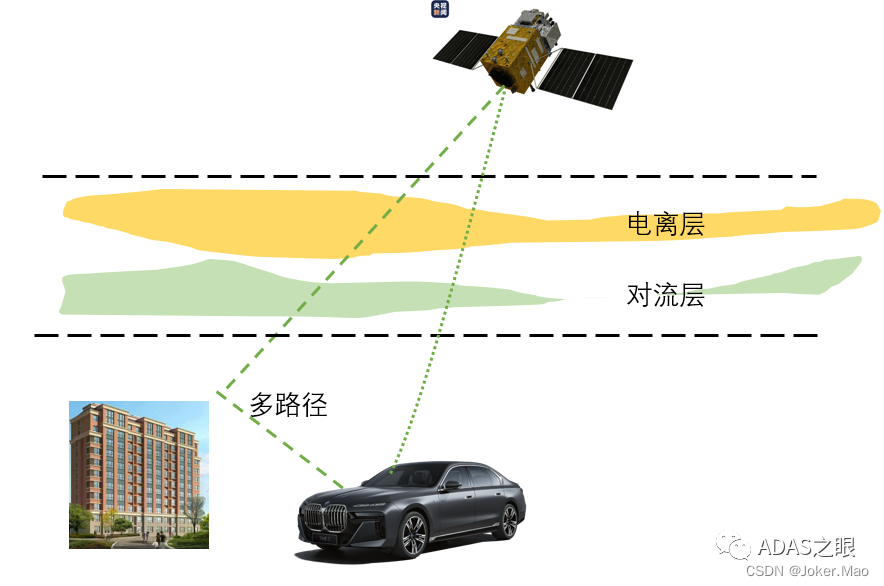
在上图中可以看出,GPS在实际应用干扰非常多,为了减少由于这些外界非理想因素导致GPS的定位误差,差分GPS定位技术应运而生。
差分GPS定位技术是在地面固定的位置建立GPS基站,然后基站也跟卫星进行通信。由于基站的位置固定,因此可以得到GPS的传播误差信息,然后基站在广播给到附近的GPS设备进行误差更新,如下图所示:
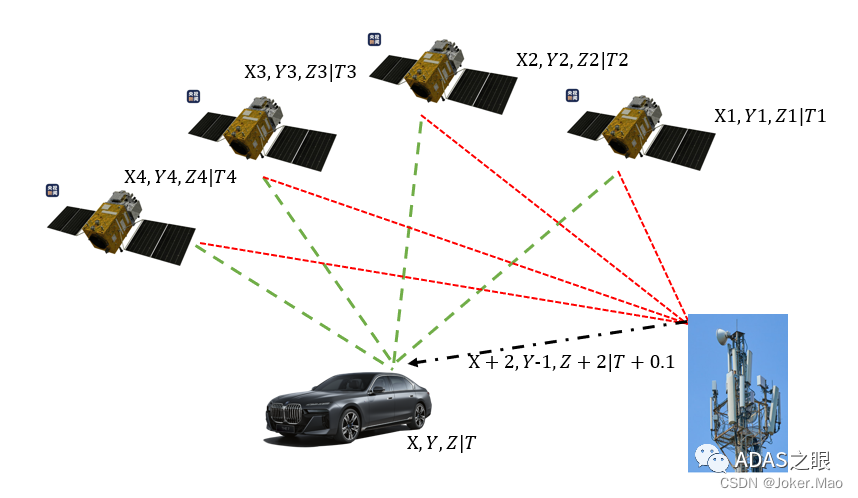
差分GPS定位的出现大大提高了GPS的定位精度,导航精度大大提高,给工业生产、民用生活带来了极大的便利。
结束语
目前,几乎全世界所有需要导航定位的用户,都会用到GPS定位系统,其高精度、全天候、全球覆盖、方便灵活和优质价廉等特点被广泛应用。GPS的广泛应用改变人们的工作方式,提高了工作效率,带来了巨大的经济,在汽车电子、机器人等地方,GPS更是扮演着不可替代的角色。