机器学习笔记之正则化(一)拉格朗日乘数法角度

机器学习笔记之正则化——拉格朗日乘数法角度
- 引言
-
- 回顾:基于正则化的最小二乘法
- 正则化描述
-
- 正则化的优化对象
- 常见的正则化方法
- 正则化角度处理神经网络的过拟合问题
-
- 场景构建
- 最优模型参数的不确定性
- 最优模型参数不确定性带来的问题
- 约束模型参数的方法
-
- 从图像角度观察
- 从拉格朗日求解角度观察
- 关于常数C\\mathcal CC
引言
从本节开始,将介绍正则化,并从拉格朗日乘数法角度进行观察。
回顾:基于正则化的最小二乘法
在处理线性回归任务过程中,我们以L2L_2L2正则化(Regularization\\text{Regularization}Regularization)为例介绍了正则化在最小二乘法损失函数的作用。
关于最小二乘估计关于权重W\\mathcal WW的矩阵形式表达公式表示如下:
{L(W)=WTXTXW−2WTXTY+YTYW^=argminWL(W)\\begin{cases} \\mathcal L(\\mathcal W) = \\mathcal W^T\\mathcal X^T\\mathcal X \\mathcal W - 2 \\mathcal W^T\\mathcal X^T\\mathcal Y + \\mathcal Y^T\\mathcal Y \\\\ \\hat {\\mathcal W} = \\mathop{\\arg\\min}\\limits_{\\mathcal W} \\mathcal L(\\mathcal W) \\end{cases}⎩⎨⎧L(W)=WTXTXW−2WTXTY+YTYW^=WargminL(W)
对L(W)\\mathcal L(\\mathcal W)L(W)关于W\\mathcal WW求解偏导,求解最优值W^\\hat {\\mathcal W}W^:
{∂L(W)∂W=2XTXW−2XTY≜0W^=(XTX)−1XTY\\begin{cases} \\begin{aligned} \\frac{\\partial \\mathcal L(\\mathcal W)}{\\partial \\mathcal W} = 2\\mathcal X^T\\mathcal X\\mathcal W - 2\\mathcal X^T\\mathcal Y \\triangleq 0 \\end{aligned} \\\\ \\hat {\\mathcal W} = (\\mathcal X^T\\mathcal X)^{-1}\\mathcal X^T\\mathcal Y \\end{cases}⎩⎨⎧∂W∂L(W)=2XTXW−2XTY≜0W^=(XTX)−1XTY
关于L2L_2L2正则化的最小二乘估计L(W,λ)\\mathcal L(\\mathcal W,\\lambda)L(W,λ)表示为:
L(W,λ)=WTXTXW−2WTXTY+YTY+λWTW\\mathcal L(\\mathcal W,\\lambda) = \\mathcal W^T\\mathcal X^T\\mathcal X \\mathcal W - 2 \\mathcal W^T\\mathcal X^T\\mathcal Y + \\mathcal Y^T\\mathcal Y + \\lambda \\mathcal W^T\\mathcal WL(W,λ)=WTXTXW−2WTXTY+YTY+λWTW
对应最优解表示为:
W^=(XTX+λI)−1XTY\\hat {\\mathcal W} = (\\mathcal X^T\\mathcal X + \\lambda \\mathcal I)^{-1} \\mathcal X^T\\mathcal YW^=(XTX+λI)−1XTY
关于前后加正则化的权重最优解对比发现,在NNN阶方阵XTX\\mathcal X^T\\mathcal XXTX每个主对角线元素中添加了一个λ\\lambdaλ。这样能够保证XTX\\mathcal X^T\\mathcal XXTX必然是正定矩阵,而不单是实对称矩阵。如果 XTX\\mathcal X^T\\mathcal XXTX不是满秩矩阵,从而无法求解矩阵的逆Λ−1\\Lambda^{-1}Λ−1:
其中Q\\mathcal QQ表示正交矩阵。
XTX=QΛQT\\mathcal X^T\\mathcal X = \\mathcal Q\\Lambda\\mathcal Q^TXTX=QΛQT
正则化描述
正则化的优化对象
正则化,本质上是一种减少过拟合的方法。在神经网络中,关于正则化的描述是指关于权重W\\mathcal WW的正则化。在神经网络中,参数分为两类:权重(Weight)(\\text{Weight})(Weight)、偏置(Bias)(\\text{Bias})(Bias)。
-
权重影响的是神经网络所逼近函数的形状;而偏置影响的是函数的位置信息。在神经网络学习过程中,一旦对权重进行约束,偏置也会随之进行调整。因此对偏置进行约束意义不大。
-
从M-P\\text{M-P}M-P神经元的角度观察,偏置本身就是激活神经元的阈值。而阈值可看作是某权重与对应哑结点(Dummy Node\\text{Dummy Node}Dummy Node)的线性结果,因而可以在学习过程中将阈值的学习包含在权重中(WDum∈W\\mathcal W_{\\text{Dum}} \\in \\mathcal WWDum∈W):
θ=WDum⋅xDum⏟fixed=−1\\theta = \\mathcal W_{\\text{Dum}} \\cdot \\underbrace{x_{\\text{Dum}}}_{\\text{fixed}=-1}θ=WDum⋅fixed=−1xDum
因此,正则化的优化对象是权重参数W\\mathcal WW。
常见的正则化方法
常见的正则化方法是L1,L2L_1,L_2L1,L2正则化。这里的L1,L2L_1,L_2L1,L2是指对应范数的类型。以L2L_2L2范数为例。假设某权重W\\mathcal WW是一个ppp维向量:
W=(w1,w2,⋯,wp)T\\mathcal W = (w_1,w_2,\\cdots,w_p)^TW=(w1,w2,⋯,wp)T
而W\\mathcal WW可看作是ppp维特征空间中的一个具体的点。而L2L_2L2范数表示该点W\\mathcal WW到ppp维特征空间原点之间的距离:
∣∣W∣∣2=(w1−0)2+(w2−0)2+⋯+(wp−0)2=∣w1∣2+∣w2∣2+⋯+∣wp∣2\\begin{aligned} ||\\mathcal W||_2 & = \\sqrt{(w_1 - 0)^2 + (w_2 - 0)^2 + \\cdots + (w_p - 0)^2}\\\\ & = \\sqrt{|w_1|^2 + |w_2|^2 + \\cdots + |w_p|^2} \\end{aligned}∣∣W∣∣2=(w1−0)2+(w2−0)2+⋯+(wp−0)2=∣w1∣2+∣w2∣2+⋯+∣wp∣2
以二维特征为例。此时的W(2)\\mathcal W^{(2)}W(2)表示为:W(2)=(w1,w2)T\\begin{aligned}\\mathcal W^{(2)} = (w_1,w_2)^T\\end{aligned}W(2)=(w1,w2)T。关于W(2)\\mathcal W^{(2)}W(2)的L2L_2L2范数∣∣W(2)∣∣2||\\mathcal W^{(2)}||_2∣∣W(2)∣∣2可表示为:
∣∣W(2)∣∣2=∣w1∣2+∣w2∣2||\\mathcal W^{(2)}||_2 = \\sqrt{|w_1|^2 + |w_2|^2}∣∣W(2)∣∣2=∣w1∣2+∣w2∣2
满足到ppp维特征空间原点之间距离为∣∣W(2)∣∣2||\\mathcal W^{(2)}||_2∣∣W(2)∣∣2的W\\mathcal WW的集合在图像中表示的形状是一个圆,这意味着在圆上的每一个点都表示其特征满足L2L_2L2范数结果相同的权重:
圆形状仅仅是二维特征的一个描述。随着维度增加,其形状是球、以及超球体。该图像视频链接见末尾,侵删,下同。

同理,L1L_1L1正则化对应的L1L_1L1范数表示如下:
∣∣W∣∣1=∣w1∣+∣w2∣+⋯+∣wp∣||\\mathcal W||_1 = |w_1| + |w_2| + \\cdots + |w_p|∣∣W∣∣1=∣w1∣+∣w2∣+⋯+∣wp∣
依然以二维权重特征∣∣W(2)∣∣1=∣w1∣+∣w2∣||\\mathcal W^{(2)}||_1 = |w_1| + |w_2|∣∣W(2)∣∣1=∣w1∣+∣w2∣为例,其对应的权重集合在图像中表示为:

正则化不仅只有L1,L2L_1,L_2L1,L2正则化。在K-Means\\text{K-Means}K-Means聚类算法中介绍过:
- L1L_1L1范数即权重与特征原点之间的曼哈顿距离(Manhattan Distance\\text{Manhattan Distance}Manhattan Distance);
- L2L_2L2范数即权重与特征原点之间的欧几里得距离(Euclidean Distance\\text{Euclidean Distance}Euclidean Distance)。
它们都是明可夫斯基距离(Minkowski Distance\\text{Minkowski Distance}Minkowski Distance)的一种具体表示结果:
∣∣W∣∣p=(∑k=1m∣wk−0∣p)1p||\\mathcal W||_p = \\left(\\sum_{k=1}^m|w_k - 0|^p\\right)^{\\frac{1}{p}}∣∣W∣∣p=(k=1∑m∣wk−0∣p)p1
mmm不仅可以取1,21,21,2;它可以取到更大的数值,甚至是无穷大。对应图像举例表示如下:
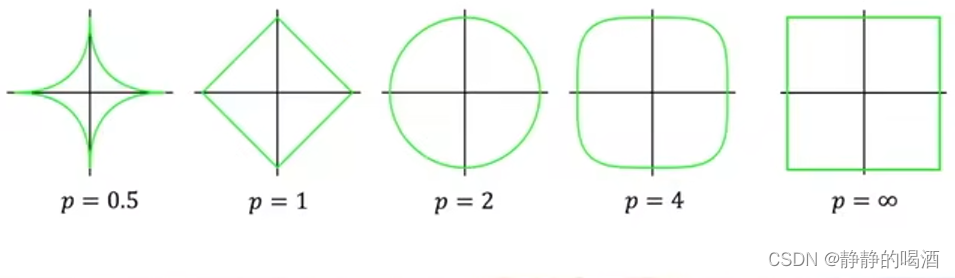
观察,当参数p≥1p \\geq1p≥1时,满足LpL_pLp范数相等的点围成的集合图像是一个凸集合。而相反的,0<p≤10 <p \\leq10<p≤1时,对应图像时一个非凸集合。而L1,L2L_1,L_2L1,L2正则化就合理利用了凸集特性,取处理神经网络中出现的过拟合问题。
正则化角度处理神经网络的过拟合问题
场景构建
- 具体针对某神经网络的输出层神经元进行描述。以多分类任务为例,对应选择的激活函数是Softmax\\text{Softmax}Softmax函数:
{Z(l)=[W(l)]T⋅a(l−1)+b(l)a(l)=Softmax(Z(l))\\begin{cases} \\mathcal Z^{(l)} = [\\mathcal W^{(l)}]^T \\cdot a^{(l-1)} + b^{(l)} \\\\ a^{(l)} = \\text{Softmax}(\\mathcal Z^{(l)}) \\end{cases}{Z(l)=[W(l)]T⋅a(l−1)+b(l)a(l)=Softmax(Z(l))
其中W(l)\\mathcal W^{(l)}W(l)表示输出层神经元的权重;a(l−1)a^{(l-1)}a(l−1)表示上一层神经元的输入信息;Z(l)=(Z1(l),Z2(l),⋯,Zp(l))p×1T\\mathcal Z^{(l)}=(\\mathcal Z_1^{(l)},\\mathcal Z_2^{(l)},\\cdots,\\mathcal Z_p^{(l)})_{p \\times 1}^TZ(l)=(Z1(l),Z2(l),⋯,Zp(l))p×1T表示输出层对应线性运算结果。a(l)a^{(l)}a(l)表示输出层的最终输出。Softmax(Z(l))\\text{Softmax}(\\mathcal Z^{(l)})Softmax(Z(l))展开结果表示如下:
a(l)=Softmax(Z(l))=[exp{Z1(l)}∑i=1pexp{Zi(l)},exp{Z2(l)}∑i=1pexp{Zi(l)},⋯,exp{Zp(l)}∑i=1pexp{Zi(l)}]p×1Ta^{(l)} = \\text{Softmax}(\\mathcal Z^{(l)}) = \\left[\\frac{\\exp\\{\\mathcal Z_1^{(l)}\\}}{\\sum_{i=1}^p \\exp\\{\\mathcal Z_i^{(l)}\\}},\\frac{\\exp\\{\\mathcal Z_2^{(l)}\\}}{\\sum_{i=1}^p \\exp\\{\\mathcal Z_i^{(l)}\\}},\\cdots,\\frac{\\exp\\{\\mathcal Z_p^{(l)}\\}}{\\sum_{i=1}^p \\exp\\{\\mathcal Z_i^{(l)}\\}}\\right]_{p \\times 1}^Ta(l)=Softmax(Z(l))=[∑i=1pexp{Zi(l)}exp{Z1(l)},∑i=1pexp{Zi(l)}exp{Z2(l)},⋯,∑i=1pexp{Zi(l)}exp{Zp(l)}]p×1T - 关于损失函数,这里使用极大似然估计(Maximum Likelihood Estimate,MLE\\text{Maximum Likelihood Estimate,MLE}Maximum Likelihood Estimate,MLE)
J(a(l))=MLE(a(l))\\mathcal J(a^{(l)}) = \\text{MLE}(a^{(l)})J(a(l))=MLE(a(l))
最优模型参数的不确定性
仅仅从输出层的角度观察该分类任务的目标:如果上一层的输出结果a(l−1)a^{(l-1)}a(l−1)确定的条件下,找到一组合适的权重、偏置W^(l),b^(l)\\hat {\\mathcal W}^{(l)},\\hat b^{(l)}W^(l),b^(l)使得损失函数达到最小:
W^(l),b^(l)=argmaxW(l),b(l)J{Softmax[(W^(l))T⋅a(l−1)+b^(l)]}\\hat {\\mathcal W}^{(l)},\\hat b^{(l)} = \\mathop{\\arg\\max}\\limits_{\\mathcal W^{(l)},b^{(l)}} \\mathcal J \\left\\{\\text{Softmax} \\left[(\\hat {\\mathcal W}^{(l)})^T \\cdot a^{(l-1)} + \\hat b^{(l)}\\right]\\right\\}W^(l),b^(l)=W(l),b(l)argmaxJ{Softmax[(W^(l))T⋅a(l−1)+b^(l)]}
但实际上,上一层的输出结果a(l−1)a^{(l-1)}a(l−1)并非是确定的,而对于a(l−1)a^{(l-1)}a(l−1)也同样受对应的W(l−1),b(l−1)\\mathcal W^{(l-1)},b^{(l-1)}W(l−1),b(l−1)约束。
- 假设通过l−1l-1l−1层的线性运算以及激活函数,使最终得到的输出结果a^(l−1)=2⋅a(l−1)\\hat a^{(l-1)} = 2 \\cdot a^{(l-1)}a^(l−1)=2⋅a(l−1):
例如:使用ReLU\\text{ReLU}ReLU激活函数,对应的W(l−1),b(l−1)\\mathcal W^{(l-1)},b^{(l-1)}W(l−1),b(l−1)均乘以222.
a^(l−1)=2⋅a(l−1)=ReLU[2⋅W(l−1)⋅a(l−2)+2⋅b(l−1)]\\hat a^{(l-1)} = 2 \\cdot a^{(l-1)} = \\text{ReLU} \\left[2 \\cdot \\mathcal W^{(l-1)} \\cdot a^{(l-2)} + 2 \\cdot b^{(l-1)}\\right]a^(l−1)=2⋅a(l−1)=ReLU[2⋅W(l−1)⋅a(l−2)+2⋅b(l−1)] - 此时,由于a(l−1)⇒a^(l−1)=2⋅a(l−1)a^{(l-1)} \\Rightarrow \\hat a^{(l-1)} = 2 \\cdot a^{(l-1)}a(l−1)⇒a^(l−1)=2⋅a(l−1),在最终输出层中,同样需要调整输出层的参数来拟合最终结果:
调整部分:W^(l)⇒12W^(l)\\hat {\\mathcal W}^{(l)} \\Rightarrow \\frac{1}{2} \\hat {\\mathcal W}^{(l)}W^(l)⇒21W^(l)
Z(l)=12[W^(l)]T⋅2⋅a(l−1)⏟a^(l−1)+b^(l)\\mathcal Z^{(l)} = \\frac{1}{2} [\\hat {\\mathcal W}^{(l)}]^T \\cdot \\underbrace{2 \\cdot a^{(l-1)}}_{\\hat a^{(l-1)}} + \\hat b^{(l)}Z(l)=21[W^(l)]T⋅a^(l−1)2⋅a(l−1)+b^(l)
这里说明的是:在训练神经网络的过程中,假设能使损失函数达到最小的权重、偏置信息W^,b^\\hat {\\mathcal W},\\hat bW^,b^不是唯一确定的。最终获取损失函数最小的W^,b^\\hat {\\mathcal W},\\hat bW^,b^的大小取决于多种情况。例如:开始训练之前,对权重、偏置的初始化结果Winit,binit\\mathcal W_{init},b_{init}Winit,binit的大小。
随机初始化的Winit,binit\\mathcal W_{init},b_{init}Winit,binit虽然各不相同,并且可能差异极大,但并不影响该参数在反向传播过程中使得损失函数达到最小。也就是说,如果训练了若干次神经网络,并且都使损失函数达到了最小值,但每次训练产生的最终模型参数W,b\\mathcal W,bW,b可能使一组一组不同的值。
最优模型参数不确定性带来的问题
从理论上来说,我们仅需要观察损失函数达到最小对应的最优模型参数即可,但真实情况下,效果并非如此。
-
如果我们的数据集是一个全集:描述该任务中的所有样本均包含在数据集合中,即便参数不唯一,也不会影响最终的预测结果。
在极大似然估计与最大后验概率估计中介绍过,在面对任务时,它对应的真实模型是客观存在的。也就是说,该真实模型可以源源不断地生成样本。因此,想要从真实模型中采样是永远采不完的。
其次,如果真的得到一个全集,我们完全可以通过查询的方式得到对应结果。并且它是完全正确的。那就没有必要使用机器学习算法来解决该问题了。
-
同理,如果我们的预测任务仅仅在训练集中使用,参数不唯一同样不会影响最终预测结果。
但机器学习的目的就是用来预测未知(训练集之外)的数据,这种做法与机器学习的目的相悖,没有使用意义。
假设在训练集经过若干次训练,得到了若干组各自之间存在差异的模型参数。这些模型参数有大有小,在对陌生数据使用模型进行预测时,不同大小参数计算得到对应的Softmax\\text{Softmax}Softmax分量有大有小,最终可能导致分类存在差异的情况。
并且,样本自身存在噪声,也有可能存在 大的模型参数 和噪声之间的线性计算有可能主导了分类结果。使得最后判断的结果更容易出错。既然不同模型参数可能带来更多问题,我们是否可以寻找方法来约束一下参数???
约束模型参数的方法
针对上述问题,一种想法是约束模型参数的可行域范围:如果参数在可行域范围内,对于该参数的结果会认可;反之如果可行域范围之外,存在使得损失函数值更小的模型参数,也不会认可该参数。
关于可行域范围的描述,这里使用范数进行表示:
这里以L2L_2L2范数为例。这里J\\mathcal JJ依然表示损失函数;C\\mathcal CC表示可行域范围的常数,它表示权重空间中的点W\\mathcal WW到原点之间的距离≤C\\leq \\mathcal C≤C.这里将bbb归纳进W\\mathcal WW中,省略。
{minJ(W)s.t.∣∣W∣∣2−C≤0\\begin{cases} \\mathop{\\min} \\mathcal J(\\mathcal W) \\\\ s.t. \\quad ||\\mathcal W||_2 - \\mathcal C \\leq 0 \\end{cases}{minJ(W)s.t.∣∣W∣∣2−C≤0
从图像角度观察
关于损失函数J\\mathcal JJ以及正则项∣∣W∣∣2−C||\\mathcal W||_2 - \\mathcal C∣∣W∣∣2−C对应在权重特征空间中的范围表示如下:

作为约束条件的正则项(绿色圆),在圆内(包含边界)都是它的可行域范围;而褐色线表示损失函数的等高线,椭圆越小,它对应的权重的结果越优,损失函数越小。
为什么要选择蓝色点:实际上选择任意绿色圆内褐色线上的点都是满足约束要求的。但是只有蓝色点权重的向量分量对梯度下降方向的分量的比重最大。也可以理解成约束条件下的最优方向/权重。
从拉格朗日求解角度观察
这明显是一个带约束的优化问题。使用拉格朗日乘数法,对目标函数L(W,λ)\\mathcal L(\\mathcal W,\\lambda)L(W,λ)进行表示:
L(W,λ)=J(W)+λ(∣∣W∣∣2−C)\\mathcal L(\\mathcal W,\\lambda) = \\mathcal J(\\mathcal W) + \\lambda (||\\mathcal W||_2 - \\mathcal C)L(W,λ)=J(W)+λ(∣∣W∣∣2−C)
由于是不等式约束,基于目标函数的优化结果可表示为:
其中λ\\lambdaλ表示‘拉格朗日乘子’。
{minWmaxλL(W,λ)s.t.λ≥0\\begin{cases} \\mathop{\\min}\\limits_{\\mathcal W} \\mathop{\\max}\\limits_{\\lambda} \\mathcal L(\\mathcal W,\\lambda) \\\\ s.t. \\quad \\lambda \\geq 0 \\end{cases}{WminλmaxL(W,λ)s.t.λ≥0
将目标函数L(W,λ)\\mathcal L(\\mathcal W,\\lambda)L(W,λ)展开,得到如下结果:
{L(W,λ)=J(W)+λ(∣∣W∣∣2−C)=J(W)+λ∣∣W∣∣2−λ⋅CL(W,λ)=J(W)+λ∣∣W∣∣2\\begin{cases} \\begin{aligned}\\mathcal L(\\mathcal W,\\lambda) & = \\mathcal J(\\mathcal W) + \\lambda(||\\mathcal W||_2 - \\mathcal C) \\\\ & = \\mathcal J(\\mathcal W) + \\lambda ||\\mathcal W||_2 -\\lambda \\cdot \\mathcal C \\end{aligned}\\\\ \\mathcal L(\\mathcal W,\\lambda) = \\mathcal J(\\mathcal W) + \\lambda ||\\mathcal W||_2 \\end{cases}⎩⎨⎧L(W,λ)=J(W)+λ(∣∣W∣∣2−C)=J(W)+λ∣∣W∣∣2−λ⋅CL(W,λ)=J(W)+λ∣∣W∣∣2
其中上面的表示拉格朗日乘数法得到的结果;下面是常见的正则化表达结果。由于λ,C\\lambda,\\mathcal Cλ,C均是常数,对于求解最优权重W\\mathcal WW不影响,从而有:
对两目标函数对W\\mathcal WW求解梯度,由于常数λ⋅C\\lambda \\cdot \\mathcal Cλ⋅C的梯度是000,求出的W\\mathcal WW最值自然是相同的。
argW(minWmaxλJ(W)+λ∣∣W∣∣2−λ⋅Cs.t.λ≥0)=argW(minWmaxλJ(W)+λ∣∣W∣∣2s.t.λ≥0)\\mathop{\\arg}\\limits_{\\mathcal W} \\begin{pmatrix}\\mathop{\\min}\\limits_{\\mathcal W} \\mathop{\\max}\\limits_{\\lambda} \\mathcal J(\\mathcal W) + \\lambda ||\\mathcal W||_2 -\\lambda \\cdot \\mathcal C \\\\ s.t. \\quad \\lambda \\geq 0\\end{pmatrix} = \\mathop{\\arg}\\limits_{\\mathcal W} \\begin{pmatrix}\\mathop{\\min}\\limits_{\\mathcal W} \\mathop{\\max}\\limits_{\\lambda} \\mathcal J(\\mathcal W) + \\lambda ||\\mathcal W||_2 \\\\ s.t. \\quad \\lambda \\geq 0\\end{pmatrix}Warg(WminλmaxJ(W)+λ∣∣W∣∣2−λ⋅Cs.t.λ≥0)=Warg(WminλmaxJ(W)+λ∣∣W∣∣2s.t.λ≥0)
至此,关于正则化与拉格朗日乘数法得到的关于W\\mathcal WW的优化解是等价的。
关于常数C\\mathcal CC
关于C\\mathcal CC的物理意义是:某权重点在权重空间中到原点的距离。就是上述绿色圆的半径。
但从上述正则化的角度观察,它并没有对常数C\\mathcal CC进行约束,那么是否可以说明常数C\\mathcal CC不重要呢?
自然不是。
在使用梯度下降法优化模型参数W\\mathcal WW的过程中,每次迭代产生的梯度均与真正梯度结果大小相等,方向相反:
W(t+1)⇐W(t)−η⋅∂L(W(t))∂W(t)\\mathcal W^{(t+1)} \\Leftarrow \\mathcal W^{(t)} - \\eta \\cdot \\frac{\\partial \\mathcal L(\\mathcal W^{(t)})}{\\partial \\mathcal W^{(t)}}W(t+1)⇐W(t)−η⋅∂W(t)∂L(W(t))
但是加入正则化后,我们的权重被约束在绿色圆范围内。而这个绿色圆的范围,也就是半径C\\mathcal CC并不是一成不变的,而是需要达到一种微妙的平衡:
- 通过L2L_2L2范数的约束,使得学习出的权重尽量不出现过拟合;
- 被约束在绿色圆范围内,对应的权重预测结果是不够准确的,我们希望它更准确;
虽然我们没有直接约束C\\mathcal CC,但是我们可以通过约束λ\\lambdaλ来约束绿色圆的范围。并且另一个重要原因是:调整λ\\lambdaλ,从而调整C\\mathcal CC,最终实现蓝色点梯度与真正梯度大小相等。
如果每次迭代过程内,梯度的大小被确定的情况下,λ⋅C\\lambda \\cdot \\mathcal Cλ⋅C被约束在了一个确定的范围:
- 如果λ\\lambdaλ数值(人为设定)较大,这意味着C\\mathcal CC较小,从而使权重可行域范围很小。这样的权重构建的模型预测结果必然不准确,从而使预测结果的偏差较大;
- 如果λ\\lambdaλ数值较小,着意味着C\\mathcal CC较大。权重可行域范围更大。如果极端一点,该范围把损失函数的范围(褐色线)全覆盖上了,那么正则化没有意义,此时产生过拟合。最终会使预测结果的方差较大。
这里有一道正则化与偏差方差的题,这里挖一个坑,后续介绍传送门
下一节将继续介绍正则化——从权重衰减的角度观察。
相关参考:
“L1和L2正则化”直观理解(之一),从拉格朗日乘数法角度进行理解