Solidworks小车模型转urdf文件

Solidworks小车模型转urdf文件
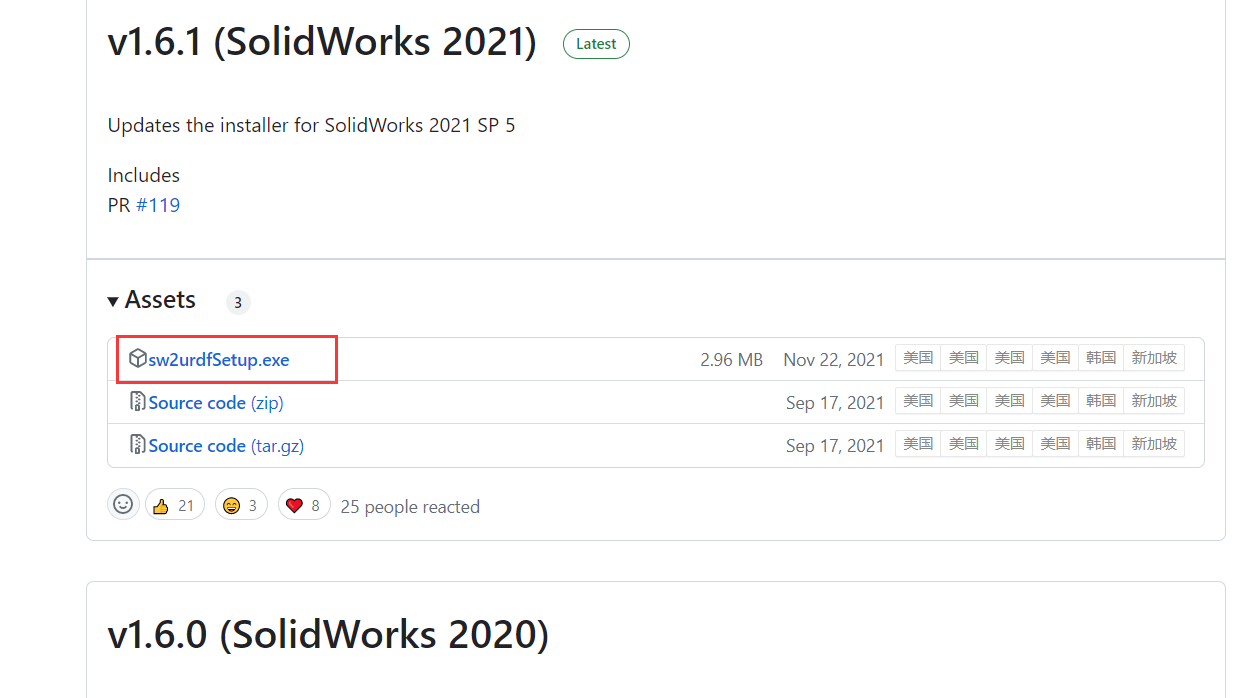
下载sw2urdf插件
sw2urdf插件安装github地址
选择适合自己SolidWorks版本下载
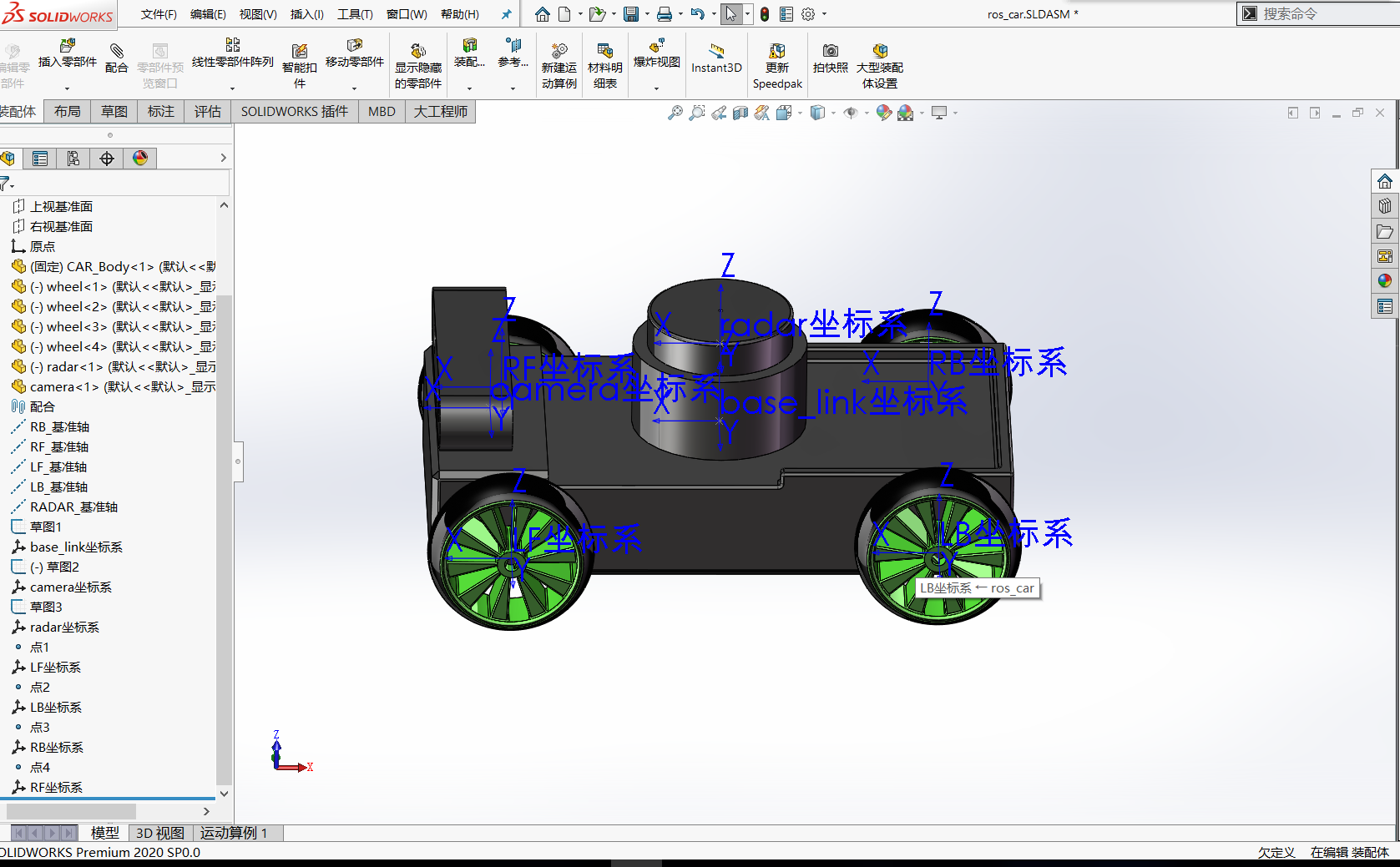
SolidWorks建模
- 装配零件
- 在joint为旋转的地方建立参考基准轴
- 每个零件建立参考坐标系
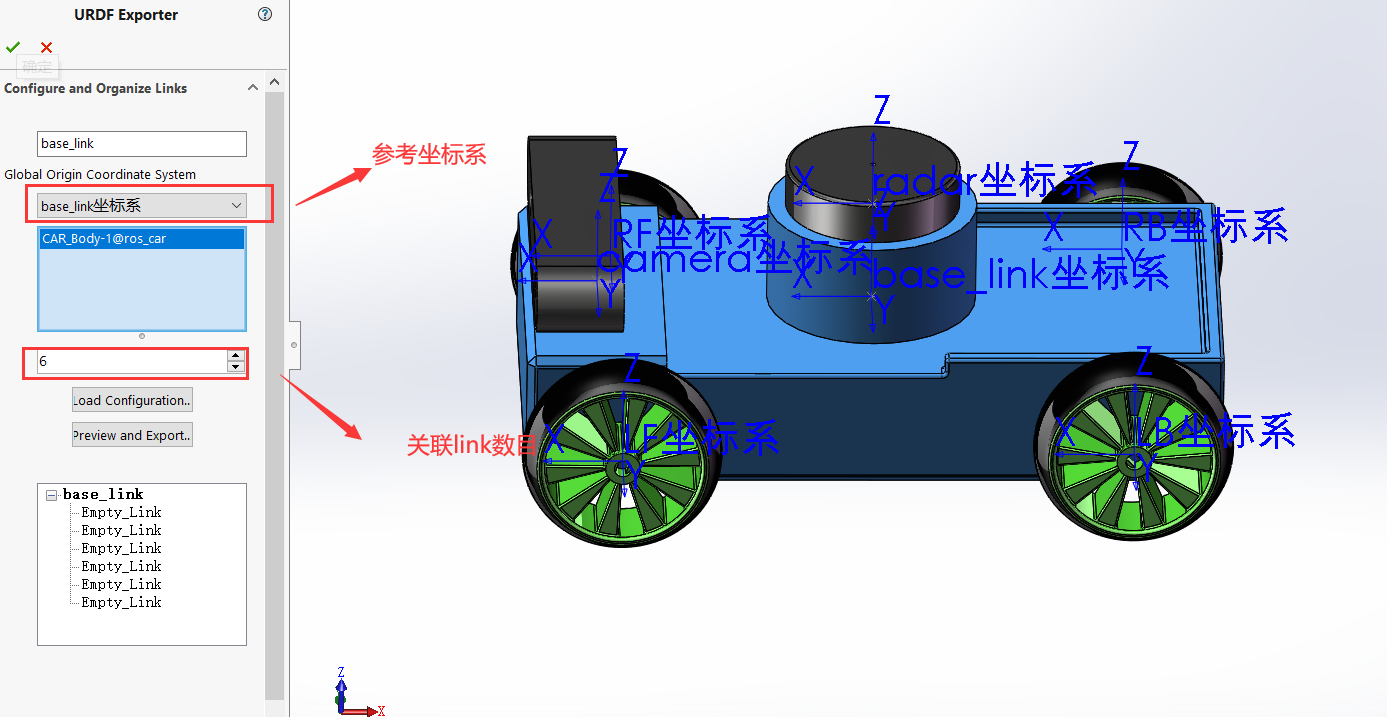
sw2urdf
工具->Tools->Export as urdf
首先选择主体部分base_link,然后选择参考坐标系和base_link相关联的link数目,我的为6包括4个轮子1个雷达1个摄像头
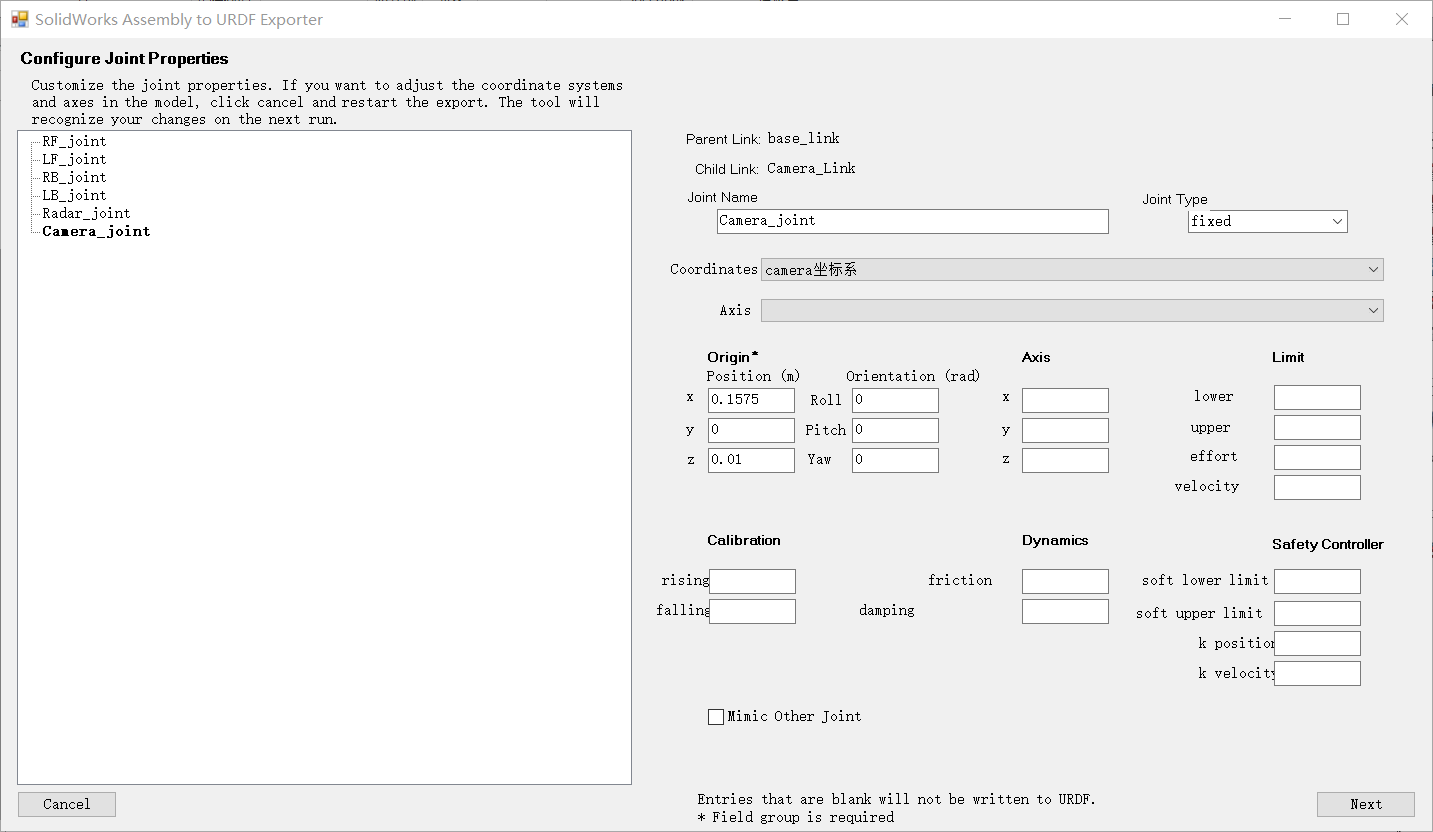
然后对每一个link配置,由于步骤相似,现以一个轮子为例:
重命名link和joint,选择参考坐标系与基准轴,选择joint类型,由于轮子为旋转关节,则Joint Type为continous
- continuous: 旋转关节,可以绕单轴无限旋转
- revolute: 旋转关节,类似于 continues,但是有旋转角度限制
- prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限
- planer: 平面关节,允许在平面正交方向上平移或旋转
- floating: 浮动关节,允许进行平移、旋转运动
- fixed: 固定关节,不允许运动的特殊关节
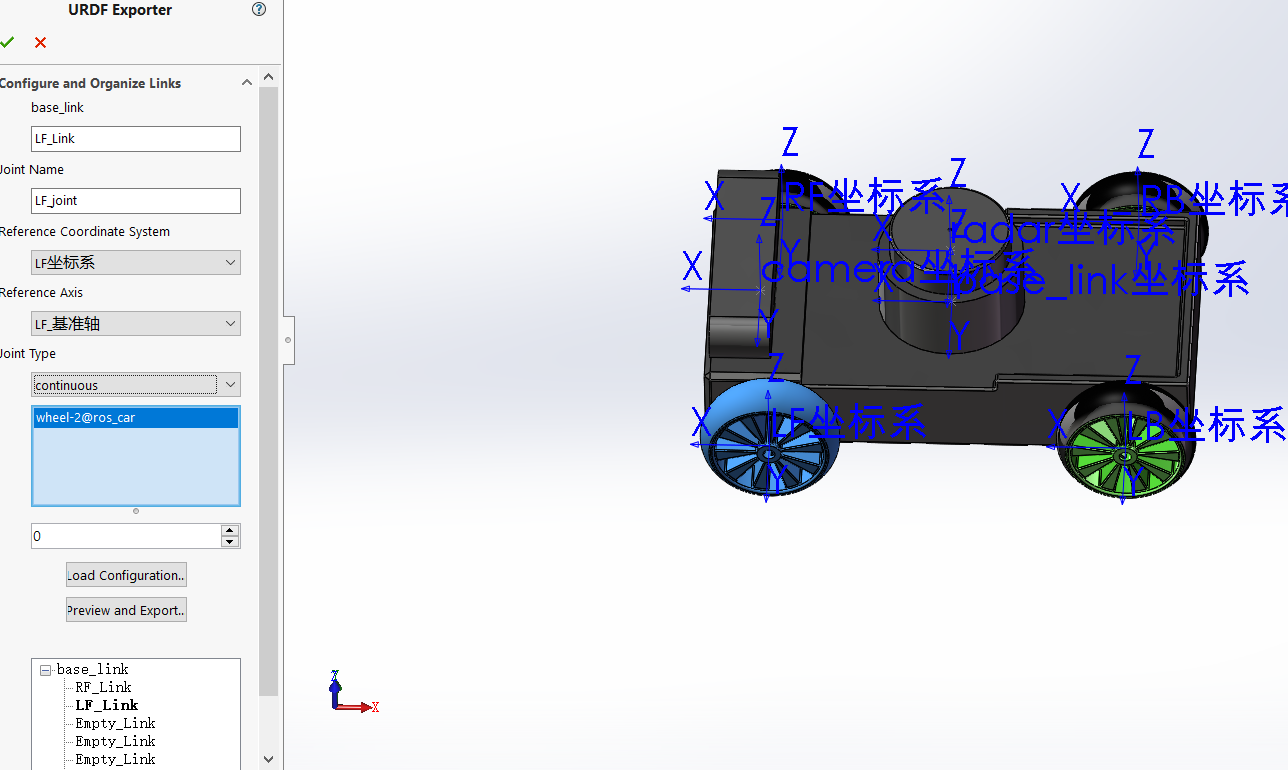
雷达也是旋转关节与轮子的配置类似,摄像头只需要修改Joint Type为fixed即可。
配置完成之后,选择Preview and Export as URDF
配置没问题,Next

然后选择Export URDF and Meshes,不要选Only URDF,因为URDF文件里会引入mesh标签里要用到meshes文件夹下的STL模型,否则在运行机器人模型时出现错误。
生成的文件架构
│ CMakeLists.txt
│ export.log
│ package.xml
│
├─config
│ joint_names_ros2_car.yaml
│
├─launch
│ display.launch
│ gazebo.launch
│
├─meshes
│ base_link.STL
│ Camera_Link.STL
│ LB_Link.STL
│ LF_Link.STL
│ Radar_Link.STL
│ RB_Link.STL
│ RF_Link.STL
│
├─textures
└─urdfros2_car.csvros2_car.urdf